一种基于元学习的电力机器人巡检场景识别方法及系统与流程
本发明涉及图像识别分类,尤其是涉及一种基于元学习的电力机器人巡检场景识别方法及系统。
背景技术:
1、电力机器人巡检场景中,时常需要对场景中某些罕见情形进行识别,如电力设备出现异物触线、电线接地、电线悬空、设备腐蚀破损、火宅、洪灾或人员倒地等。这些罕见情形通过传统深度学习在进行识别,基本无法采集足够的数据进行训练,因而需要进行少样本的场景识别方法。
2、传统的场景识别方法主要包括迁移学习和数据增强。其中,迁移学习是使用预训练模型作为特征提取器,然后重新训练全连接层,以此应对少样本问题,然而其在微调阶段也要相当的数据,对于少样本而言很难实施。而数据增强是通过翻转、裁剪、颜色变化等方式对已存在的样本进行增强,以扩大数据集的规模,但其通常需要增强数据到一定量级,如几万张,若初始样本基数太小,亦无法达到明显的增强效果。
3、现有还有匹配网络、siamese网络等可以实现样本到标签的映射网络,但均需足够多的样本为前提,故现有技术缺乏一种少样本的场景识别技术,无法实现对电力机器人巡检场景中罕见情形的识别。
技术实现思路
1、本发明旨在提供一种基于元学习的电力机器人巡检场景识别方法及系统,以解决上述技术问题,实现对巡检场景中的罕见情形的识别。
2、为了解决上述技术问题,本发明提供了一种基于元学习的电力机器人巡检场景识别方法,包括以下步骤:
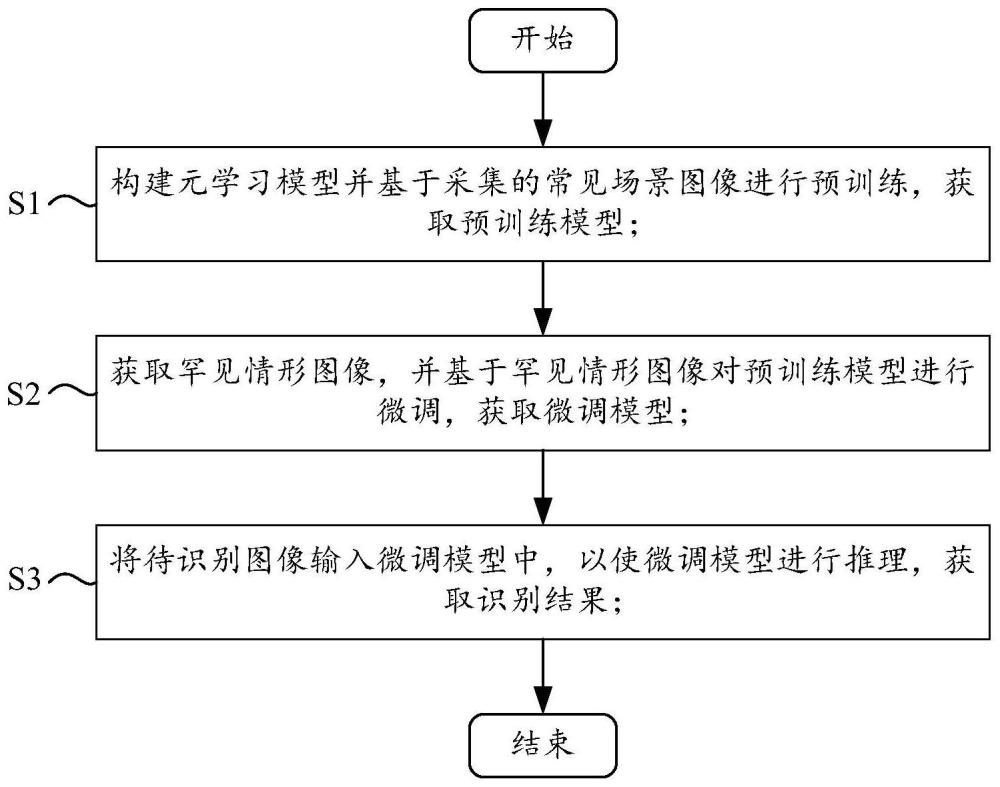
3、构建元学习模型并基于采集的常见场景图像进行预训练,获取预训练模型;
4、获取罕见情形图像,并基于罕见情形图像对预训练模型进行微调,获取微调模型;
5、将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果。
6、上述方案中,基于元学习构建模型,并通过常见场景图像进行预训练并基于罕见情形图像对其进行微调,以令得到的微调模型可以实现对巡检场景中的罕见情形的识别。其中,常见场景图像可以大量采集,避免了罕见情形图像采集难导致出现的样本不足的问题,且微调模型是在真实场景下进行预训练和微调所得到的,因此其识别准确率有所保证。
7、进一步地,所述构建元学习模型并基于采集的常见场景图像进行预训练,获取预训练模型,具体为:
8、确认模型骨干,构建元学习模型;
9、采集常见场景图像并对所有常见场景图像进行类别标注,得到标注图像;
10、以标注图像作为数据基础,采用5ways-5shot-1query的方式对元学习模型进行预训练,以使元学习模型中同类别特征差异减小,不同类别特征差异增加;
11、待预训练结束,获取预训练模型。
12、进一步地,所述以标注图像作为数据基础,采用5ways-5shot-1query的方式对元学习模型进行预训练,以使元学习模型中同类别特征差异减小,不同类别特征差异增加,具体为:
13、以标注图像作为数据基础,随机选择5个种类,即5ways;再从该5个种类中随机选择5张图像,即5shot,以获取25张图像作为支持集;
14、另从该5个种类中随机选择1张图像作为查询集,即1query;
15、采用5ways-5shot-1query的方式对元学习模型进行预训练,通过支持集和查询集构造三元组损失,以使元学习模型中同类别特征差异减小,不同类别特征差异增加。
16、进一步地,所述获取罕见情形图像,并基于罕见情形图像对预训练模型进行微调,获取微调模型,具体包括以下步骤:
17、基于数据模拟或实际场景采集,获取罕见情形图像,以使罕见情形图像满足需分类的场景种类,每种场景种类至少6张图像;
18、基于罕见情形图像对预训练模型进行微调,获取微调模型。
19、进一步地,所述将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果,具体为:
20、选择需预测的类别并和随机4个类别组成5ways,再从该5个种类中随机选择5张图像,即5shot,以获取25张图像作为支持集;
21、将输入微调模型的待识别图像作为查询集;
22、由微调模型对该26张图像进行推理,以确定查询集中待识别图像的推理结果与支持集中哪个类别的5张图像的推理结果一致,确定待识别图像的分类结果作为识别结果。
23、本发明还提供一种基于元学习的电力机器人巡检场景识别系统,包括:模型构建模块,用于构建元学习模型;图像采集模块,用于采集常见场景图像及罕见情形图像;预训练模块,用于基于常见场景图像对元学习模型进行预训练,获取预训练模型;微调模块,用于基于罕见情形图像对预训练模型进行微调,获取微调模型;场景识别模块,用于将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果。
24、上述方案提供的系统构建简单,实现方便,令系统设备可以实现基于元学习的电力机器人巡检场景识别方法,通过常见场景图像进行预训练并基于罕见情形图像对其进行微调,以令得到的微调模型可以实现对巡检场景中的罕见情形的识别。其中,常见场景图像可以大量采集,避免了罕见情形图像采集难导致出现的样本不足的问题,且微调模型是在真实场景下进行预训练和微调所得到的,因此其识别准确率有所保证。
25、进一步地,所述预训练模块包括:图像标注子模块,用于对所有常见场景图像进行类别标注,得到标注图像;预训练子模块,用于以标注图像作为数据基础,采用5ways-5shot-1query的方式对元学习模型进行预训练,以使元学习模型中同类别特征差异减小,不同类别特征差异增加。
26、进一步地,所述预训练子模块包括:支持集构建单元,用于以标注图像作为数据基础,随机选择5个种类,即5ways;再从该5个种类中随机选择5张图像,即5shot,以获取25张图像作为支持集;查询集构建单元,用于从支持集构建单元确定的5个种类中随机选择1张图像作为查询集,即1query;预训练单元,用于采用5ways-5shot-1query的方式对元学习模型进行预训练,通过支持集和查询集构造三元组损失,以使元学习模型中同类别特征差异减小,不同类别特征差异增加。
27、进一步地,所述图像采集模块,用于采集常见场景图像及罕见情形图像,包括:基于数据模拟或实际场景采集,获取罕见情形图像,以使罕见情形图像满足需分类的场景种类,每种场景种类至少6张图像。
28、进一步地,所述场景识别模块,用于将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果,具体为:选择需预测的类别并和随机4个类别组成5ways,再从该5个种类中随机选择5张图像,即5shot,以获取25张图像作为支持集;将输入微调模型的待识别图像作为查询集;由微调模型对该26张图像进行推理,以确定查询集中待识别图像的推理结果与支持集中哪个类别的5张图像的推理结果一致,确定待识别图像的分类结果作为识别结果。
技术特征:
1.一种基于元学习的电力机器人巡检场景识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于元学习的电力机器人巡检场景识别方法,其特征在于,所述构建元学习模型并基于采集的常见场景图像进行预训练,获取预训练模型,具体为:
3.根据权利要求2所述的一种基于元学习的电力机器人巡检场景识别方法,其特征在于,所述以标注图像作为数据基础,采用5ways-5shot-1query的方式对元学习模型进行预训练,以使元学习模型中同类别特征差异减小,不同类别特征差异增加,具体为:
4.根据权利要求3所述的一种基于元学习的电力机器人巡检场景识别方法,其特征在于,所述获取罕见情形图像,并基于罕见情形图像对预训练模型进行微调,获取微调模型,具体包括以下步骤:
5.根据权利要求4所述的一种基于元学习的电力机器人巡检场景识别方法,其特征在于,所述将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果,具体为:
6.一种基于元学习的电力机器人巡检场景识别系统,其特征在于,包括:
7.根据权利要求6所述的一种基于元学习的电力机器人巡检场景识别系统,其特征在于,所述预训练模块包括:
8.根据权利要求7所述的一种基于元学习的电力机器人巡检场景识别系统,其特征在于,所述预训练子模块包括:
9.根据权利要求8所述的一种基于元学习的电力机器人巡检场景识别系统,其特征在于,所述图像采集模块,用于采集常见场景图像及罕见情形图像,包括:基于数据模拟或实际场景采集,获取罕见情形图像,以使罕见情形图像满足需分类的场景种类,每种场景种类至少6张图像。
10.根据权利要求9所述的一种基于元学习的电力机器人巡检场景识别系统,其特征在于,所述场景识别模块,用于将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果,具体为:
技术总结
本发明提供了一种基于元学习的电力机器人巡检场景识别方法及系统,该方法包括:构建元学习模型并基于采集的常见场景图像进行预训练,获取预训练模型;获取罕见情形图像,并基于罕见情形图像对预训练模型进行微调,获取微调模型;将待识别图像输入微调模型中,以使微调模型进行推理,获取识别结果。本发明提供的一种基于元学习的电力机器人巡检场景识别方法,通过常见场景图像对模型进行预训练并基于罕见情形图像对其进行微调,以令得到的微调模型可以实现对巡检场景中的罕见情形的识别。常见场景图像可以大量采集,避免出现的样本不足的问题,且微调模型是在真实场景下进行预训练和微调所得到的,因此其识别准确率有所保证。
技术研发人员:彭向阳,吴吉,汪政,王宇,王锐,孙太任,林国海
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!