一种基于环境约束栅格的目标时空分布预测方法与流程
本发明属于时空数据分析,涉及一种基于环境约束栅格的目标时空分布预测方法,更为具体地讲,涉及一种以根据环境约束进行自适应调整的不规则栅格为计算单元,对运动目标未来时刻出现位置概率进行预测的方法。
背景技术:
1、随着有卫星、无人机等各类观测平台以及可见光、sar、红外等各类侦察载荷的逐步发展,各类信息系统可以实时接入观测平台侦察得到的飞机、舰船等运动目标的实时轨迹数据并进行可视化,支持各类用户实时掌控感兴趣目标的实时位置。
2、然而对于船舶避碰、交通疏导等任务,相比于目标的历史和当前位置,用户更需要掌握目标未来几分钟甚至几小时的位置动向,辅助其预先进行下一步的计划安排,避免可能出现的损失。现有的大部分目标行动预测方法仅仅是对目标未来可能运动轨迹路线进行一定程度外推,无法对目标在不同位置区域的出现概率进行全面的计算。另外一些方法虽然可以以空间栅格为计算单元,对目标未来出现在各个栅格区域的概率进行了计算,但这类方法在栅格划分机制上存在明显缺陷。
3、从常识角度考虑,目标出现在经纬度临近且地形地物相似的两个位置的概率是接近的,而两个位置即便是经纬度临近但是如果地形地物相差过大,目标出现在两个位置的概率也会差距较大,例如悬崖的两侧,虽然经纬度接近,但是目标出现在崖底和出现在崖顶的概率完全不同。以往的方法通常按照固定步长从经度和纬度划分出大小一致的矩形栅格,但这种划分方法不可避免的会将水域、山顶、平底、峡谷等不同地形和地物的区域划分到同一个栅格当中。如果以这种栅格作为计算单元,目标出现在同一个栅格内的山顶和平地的概率必然相同,这显然不符合常识。因此这表明此类栅格划分方法是不适合目标时空分布预测任务的。
4、因此亟待研究一种综合考虑环境约束进行栅格划分的目标时空分布预测方法,根据目标附近地形地物分布进行合理的栅格划分,进而将栅格作为计算单元,得到更符合目标运动常识的时空分布概率预测结果。
技术实现思路
1、本发明的目的在于克服传统栅格划分结果不贴合地形地物分布,致使计算得到的目标时空分布概率预测结果不合理的难题,提出了一种基于环境约束栅格的目标时空分布预测方法,可以根据目标实时位置周围环境对栅格的划分进行自适应变化调整,得到一系列贴合地形地物的不规则栅格,以这种栅格为计算单元对目标未来位置结果进行预测和描述,得到更贴近于目标真实运动常识的时空分布概率预测。同时在时空分布预测方法方面,提出了一种多阶多项式拟合与多预测点相交概率统计的方法来计算目标出现在各个栅格的概率。
2、本发明采用的技术方案为:
3、一种基于环境约束栅格的目标时空分布预测方法,包括以下步骤:
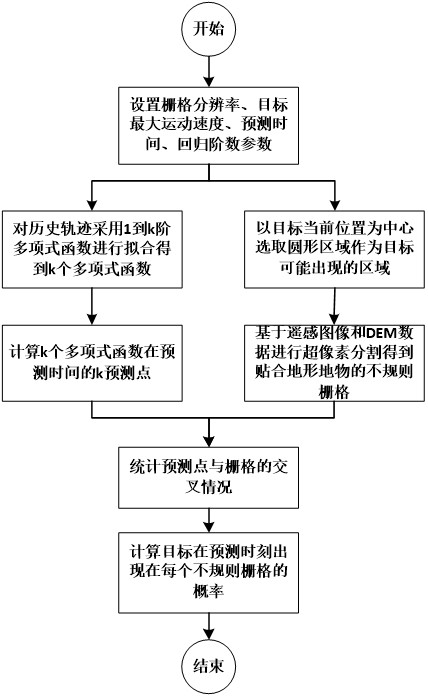
4、(1)设置栅格分辨率、目标最大运动速度、预测时间和回归阶数;
5、(2)以目标当前位置为中心,半径为r的圆形区域作为目标在时间之后会出现的区域q,将区域q的遥感图片和dem数据进行合并,形成rgb和高程组成的四通道数据;并采用种子数为s的slic超像素分割方法对四通道数据进行分割,将区域q划分为多个贴合地物地形的不规则栅格;其中,m为划分的不规则栅格数,半径r和种子数s为:
6、;
7、(3)分别采用1到k阶多项式函数对目标历史位置和当前位置组成的轨迹进行回归拟合,得到k个多项式函数;并计算目标在时刻出现的k个预测点,其中,为当前时刻,某个预测点为:
8、;
9、(4)统计k个预测点与第i个栅格的相交情况,1≤i≤m,则在时刻,目标出现在第i个栅格的概率模型表示为:
10、;
11、(5)设置不同预测时间,返回步骤(2),计算所有栅格的概率,得到目标在不同区域单元以及任意时刻的出现概率。
12、本发明与背景技术相比具有如下优点:
13、本发明提出了一种全新的基于环境约束栅格的目标时空分布预测方法,通过对rgb-高层的四通道数据进行超像素分割,得到贴合地物地形的不规则栅格作为计算单元来计算目标时空分布预测概率,解决了现有算法因没有根据目标当前周围的地形地物进行栅格划分,容易将经纬度相近但地物地形差别较大的位置划分至同一栅格,并将该栅格作为计算预测概率的计算单元,进而难以得到合理的分布预测结果的问题。
技术特征:
1.一种基于环境约束栅格的目标时空分布预测方法,其特征在于,包括以下步骤:
技术总结
本发明属于时空数据分析技术领域,公开了一种基于环境约束栅格的目标时空分布预测方法,可根据目标实时位置周围环境对栅格的划分进行自适应变化调整,得到一系列贴合地形地物的不规则栅格,以栅格为计算单元对目标未来位置结果进行预测和描述,得到更贴近于目标真实运动常识的时空分布概率预测。首先设定栅格分辨率、目标最大运动速度等预设参数。随后以目标当前位置为中心选取圆形区域作为目标可能出现的区域,并将覆盖该区域的遥感图片和DEM数据合并,通过分割超像素得到贴合地形地物分布的不规则栅格。接着采用多阶回归函数拟合得到多个预测点,并统计预测点与栅格的交叉情况,完成对目标在任意时刻不同位置的分布概率的预测计算。
技术研发人员:楚博策,陈金勇,朱进,张超,王士成,韩续,孙康,谭娟,刘敬一,郭琦,姚晨,魏昊坤
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!