一种基于人工智能的撒肥车运行安全监管系统的制作方法
本发明涉及撒肥车运行安全监管,具体是一种基于人工智能的撒肥车运行安全监管系统。
背景技术:
1、随着人们生活水平的提高,人们对农产品的要求越来越高,所以在农田里使用有机肥是一种改善农产品品质的重要方法,发酵干燥后的粪便对于农田来说是很好的肥料,人工撒粪劳动强度太大,效率也较低,因此智能撒肥车可以减少很多不必要的劳动;
2、在现有技术中的智能撒肥车是通过送肥装置向后输送肥料,后传动轴驱动齿轮箱,实现双撒甩盘旋转,从而实现肥料撒播,但撒肥车运行的安全性极易影响撒肥效果,难以通过对撒肥车的撒肥效果进行自检评估分析,从正面排查影响撒肥效果的撒肥设备本身原因与撒肥车的运行安全情况,并针对式的追踪出影响撒肥量的原因,同时侧面的监管撒肥车的运行安全情况,确保撒肥量准确性的同时,进一步确保撒肥车的运行安全;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于提供一种基于人工智能的撒肥车运行安全监管系统,解决对撒肥车的撒肥量进行实时监测分析,判断影响其撒肥效果的原因,并及时地做出适应性的调整问题。
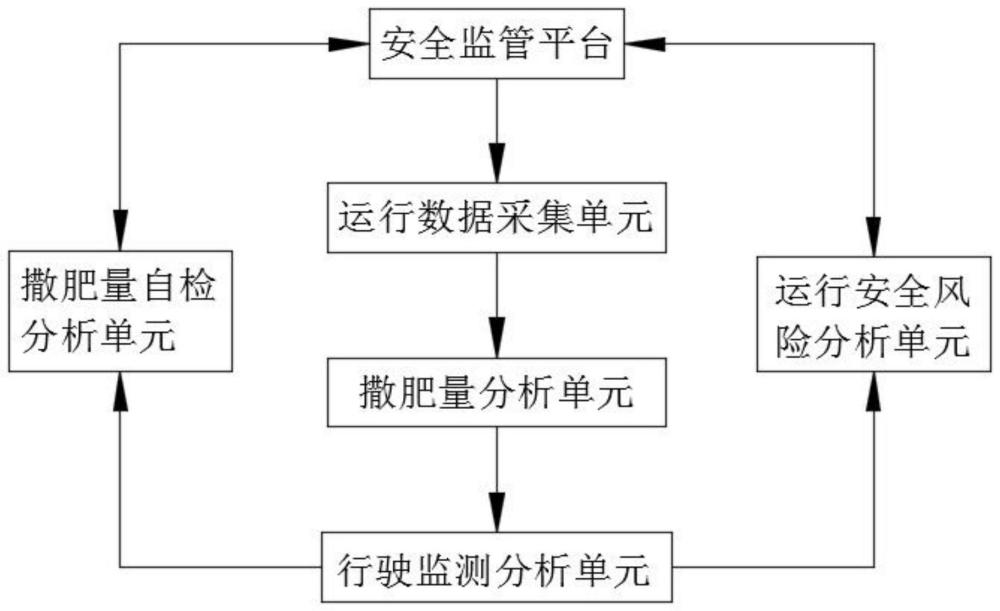
2、为实现上述目的,本发明提供如下技术方案:一种基于人工智能的撒肥车运行安全监管系统,包括安全监管平台、运行数据采集单元、撒肥量分析单元、行驶监测分析单元、撒肥量自检分析单元以及运行安全风险分析单元;
3、当安全监管平台生成监管指令时,并将安全监管指令发送至运行数据采集单元,运行数据采集单元在接收到监管指令后,立即采集撒肥时撒肥车的撒肥数据,撒肥数据表示为时间阈值内的撒肥量,并将撒肥数据发送至撒肥量分析单元,撒肥量分析单元接收到撒肥数据,并立即对撒肥数据进行自检评估分析,将得到的撒肥异常信号发送至行驶监测分析单元;
4、行驶监测分析单元在接收到撒肥异常信号后,立即采集撒肥车的行驶数据,行驶数据包括行驶速度变化差值和重心位置变化差值,对行驶数据进行行驶评估分析,将得到的行驶异常信号发送至运行安全风险分析单元,将得到的行驶正常信号发送至撒肥量自检分析单元;
5、运行安全风险分析单元在接收到行驶异常信号后,立即采集撒肥车的风险数据,并对行驶异常信号进行风险评估分析,将得到的故障维修信号或周边异常信号发送至安全监管平台,安全监管平台将接收到的故障维修信号或周边异常信号,分别以文本的形式在撒肥车内显示;
6、撒肥量自检分析单元在接收到行驶正常信号后,立即采集撒肥车的撒肥运行数据,并对撒肥运行数据进行自检运行评估操作,将得到的撒肥故障信号发送至安全监管平台,安全监管平台将撒肥故障信号所对应的撒肥车标记并发送至手机终端。
7、进一步的,所述撒肥量分析单元的自检评估分析过程如下:
8、t1:获取得到撒肥车时间阈值内的撒肥量,并将撒肥车时间阈值内的撒肥量标记为dl;
9、t2:若撒肥车时间阈值内的撒肥量dl大于撒肥车预设时间阈值内的撒肥量dl,则判定撒肥车撒肥过程为撒肥常态,生成撒肥常态信号,若撒肥车时间阈值内的撒肥量dl小于撒肥车预设时间阈值内的撒肥量dl,则判定撒肥车撒肥过程为撒肥异常,生成撒肥异常信号。
10、进一步的,所述行驶监测分析单元的行驶评估分析过程如下:
11、s1:采集到撒肥车行驶一段时间的时长,生成行驶监测周期,并将行驶监测周期划分为若干个监测时间段,获取到各个监测时间段内的行驶速度变化差值和重心位置变化差值,行驶速度变化差值表示为监测时间段内的速度最大值与速度最小值之差,重心位置变化差值表示为监测时间段内的重心纵向位置最高处值与重心纵向位置最低处值之差;
12、s2:将行驶速度值与重心位置变化差值之和标记为行驶反馈量vh,将行驶反馈量vh与预设行驶反馈量vh进行比较,当行驶反馈量vh与预设行驶反馈量vh之间的比值小于1,则生成行驶正常信号,当行驶反馈量vh与预设行驶反馈量vh之间的比值大于等于1,则生成行驶异常信号。
13、进一步的,所述运行安全风险分析单元的风险评估分析过程如下:
14、获取到撒肥车的风险数据,风险数据包括轮胎影响值和周边影响值,轮胎影响值表示为轮胎表面摩擦系数值与轮胎内胎压值之和,周边影响值表示为撒肥车至周边或地面障碍物的距离值,将轮胎影响值与轮胎影响阈值进行比较,若轮胎影响值与轮胎影响阈值比值大于等于1,则不生成任何信号,若轮胎影响值与轮胎影响阈值比值小于1,则生成故障维修信号;
15、将周边影响值与周边影响阈值进行比较,若周边影响值与周边影响阈值比值大于1,则不生成任何信号,若周边影响值与周边影响阈值比值小于等于1,则生成周边异常信号。
16、进一步的,所述撒肥量自检分析单元的自检运行评估操作过程如下:
17、p1:采集到撒肥车撒肥一段时间的时长,并将其标记为时间阈值,将时间阈值划分为n个撒肥时间段,n为大于零的自然数,获取到n个撒肥时间段内撒肥车的撒肥运行数据,撒肥运行数据包括内影响因素和外影响因素,内影响因素表示为肥料湿度值,外影响因素包括甩盘转速值和出口表面积值,将肥料湿度值、甩盘转速值以及出口表面积值分别标记为f、sv以及sh;
18、p2:根据公式获取得到撒肥自检故障评估系数q,其中,a1、a2以及a3分别为转速测量误差因子、表面积测量误差因子以及湿度检测误差因子,且a1、a2以及a3均为大于1的正整数;
19、p3:将撒肥自检故障评估系数q与撒肥自检故障评估系数阈值进行比较,若撒肥自检故障评估系数q大于等于撒肥自检故障评估系数阈值,则不生成任何信号,若撒肥自检故障评估系数q小于撒肥自检故障评估系数阈值,则生成撒肥故障信号。
20、与现有技术相比,本发明的有益效果是:
21、1、本发明中,通过对撒肥车的撒肥效果进行自检评估分析,得到撒肥异常信号,并将撒肥异常信号发送至行驶监测分析单元,行驶监测分析单元在接收到撒肥异常信号后,立即采集撒肥车的行驶数据,并对行驶数据进行行驶评估分析,将得到的行驶异常信号发送至运行安全风险分析单元,将得到的行驶正常信号发送至撒肥量自检分析单元,从而正面排查影响撒肥效果的撒肥量自检分析单元和运行安全风险分析单元,针对式地追踪出影响撒肥量的原因,再联系侧面的监管撒肥车的运行安全情况,并将运行安全情况反馈至安全监管平台,确保撒肥量准确性的同时,进一步确保撒肥车的运行安全;
22、2、本发明中,当撒肥量自检分析单元在接收到行驶正常信号后,立即采集撒肥车的撒肥运行数据,撒肥运行数据包括内影响因素和外影响因素,内影响因素表示为肥料湿度值,外影响因素包括甩盘转速值和出口表面积值,并对撒肥运行数据进行自检运行评估操作,将得到的撒肥故障信号发送至安全监管平台,对撒肥车的自身原因进行适应性的调整,从而确保撒肥的准确性。
技术特征:
1.一种基于人工智能的撒肥车运行安全监管系统,其特征在于,包括安全监管平台、运行数据采集单元、撒肥量分析单元、行驶监测分析单元、撒肥量自检分析单元以及运行安全风险分析单元;
2.根据权利要求1所述的一种基于人工智能的撒肥车运行安全监管系统,其特征在于,所述撒肥量分析单元的自检评估分析过程如下:
3.根据权利要求1所述的一种基于人工智能的撒肥车运行安全监管系统,其特征在于,所述行驶监测分析单元的行驶评估分析过程如下:
4.根据权利要求3所述的一种基于人工智能的撒肥车运行安全监管系统,其特征在于,所述运行安全风险分析单元的风险评估分析过程如下:
5.根据权利要求3所述的一种基于人工智能的撒肥车运行安全监管系统,其特征在于,所述撒肥量自检分析单元的自检运行评估操作过程如下:
技术总结
本发明属于撒肥车运行安全监管技术领域,用于解决难以对撒肥车的撒肥量进行实时监测分析,判断影响其撒肥效果的原因,并及时地做出适应性的调整的问题,具体是一种基于人工智能的撒肥车运行安全监管系统,包括安全监管平台、运行数据采集单元、撒肥量分析单元、行驶监测分析单元、撒肥量自检分析单元以及运行安全风险分析单元,本发明是通过对撒肥车的撒肥效果进行自检评估分析,涉及有正面排查影响撒肥效果的撒肥量自检分析单元和运行安全风险分析单元,针对式地追踪出影响撒肥量的原因,再联系侧面的监管撒肥车的运行安全情况,并将运行安全情况反馈至安全监管平台,确保撒肥量准确性的同时,进一步确保撒肥车的运行安全。
技术研发人员:张计猛,张斌,翟明文,曹海军,刘云飞
受保护的技术使用者:灵璧九瑞农发科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!