一种基于数字孪生的三维模型的构建方法及系统与流程
本发明涉及数字孪生模型的构建,具体地涉及一种基于数字孪生的三维模型的构建方法及系统。
背景技术:
1、近年来,无人机技术得到了广泛应用,其在扫描点云数据和构建三维模型方面的能力也得到了迅速发展。通过无人机获取的点云数据,我们可以重建出较为粗糙的三维模型。
2、近年来,电力系统逐渐开始引入无人机建模的技术来建模数字孪生模型。但是类似于变电站的特殊场景与常规的建模不同,变电站内包括了多种电气设备,每种电气设备的形状、型号等均不同。现有的无人机扫描点云数据构建三维模型的方法虽然可以实现模型的重建,但由于技术限制和硬件设备的局限性,往往无法实现精细化建模,这就导致无人机的点云建模技术无法很好的适应电力场景建模的要求。
技术实现思路
1、本发明实施例的目的是提供一种基于数字孪生的三维模型的构建方法及系统,该构建方法及系统能够基于无人机的点云建模技术对变电站实现精细化建模。
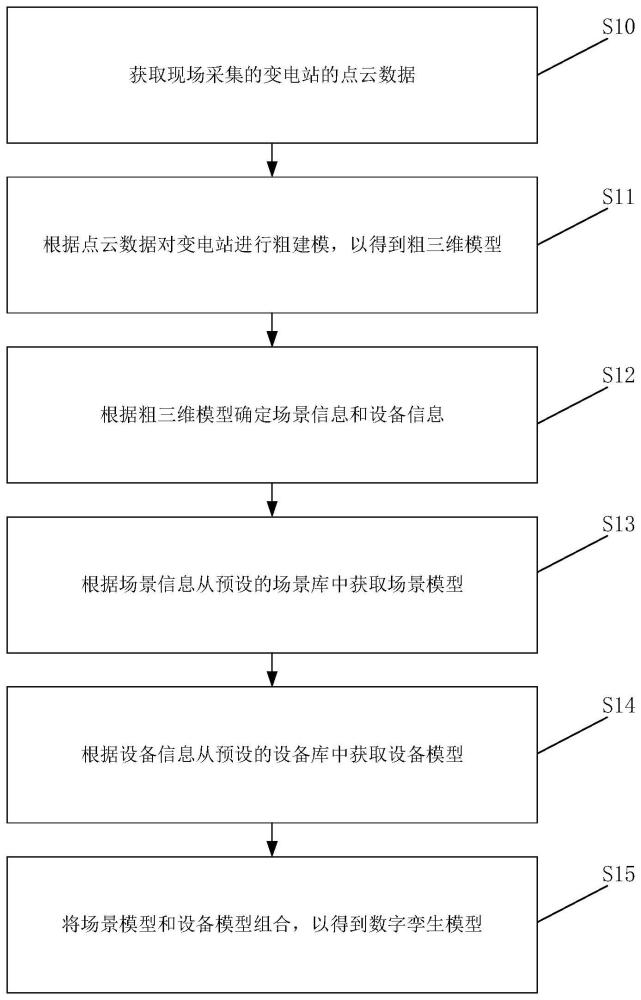
2、为了实现上述目的,本发明实施例提供一种基于数字孪生的三维模型的构建方法,所述构建方法包括:
3、获取现场采集的变电站的点云数据;
4、根据所述点云数据对所述变电站进行粗建模,以得到粗三维模型;
5、根据所述粗三维模型确定场景信息和设备信息;
6、根据所述场景信息从预设的场景库中获取场景模型;
7、根据所述设备信息从预设的设备库中获取设备模型;
8、将所述场景模型和设备模型组合,以得到数字孪生模型。
9、可选地,获取现场采集的变电站的点云数据,包括:
10、通过无人机从所述变电站的上空采集所述点云数据。
11、可选地,根据所述粗三维模型确定场景信息和设备信息,包括:
12、对所述粗三维模型的底部边缘信息进行特征检测,以得到边缘特征。
13、可选地,根据所述场景信息从预设的场景库中获取场景模型,包括:
14、根据所述边缘特征从所述场景库中获取所述场景模型。
15、可选地,根据所述粗三维模型确定场景信息和设备信息,包括:
16、对所述粗三维模型中的每个虚拟设备进行形状检测,以得到形状特征。
17、可选地,根据所述设备信息从预设的设备库中获取设备模型,包括:
18、根据所述形状特征在所述设备库中获取所述设备模型。
19、可选地,根据所述粗三维模型确定场景信息和设备信息,包括:
20、获取所述粗三维模型中相邻的两个杆塔塔尖的塔尖距离和设备的最大宽度;
21、根据所述塔尖距离和所述最大宽度计算设备的实际宽度;
22、根据所述实际宽度确定所述设备模型的型号。
23、可选地,根据所述塔尖距离和所述最大宽度计算设备的实际宽度,包括:
24、根据公式(1)计算所述实际宽度,
25、
26、其中,wr为所述实际宽度,wv为所述最大宽度,lr为实际塔尖距离,lv为所述塔尖距离。
27、另一方面,本发明还提供一种基于数字孪生的三维模型的构建系统,所述构建系统包括处理器,所述处理器用于执行如上述任一所述的构建方法。
28、再一方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有指令,所述指令用于被机器读取以使得所述机器执行如权利要求1至8任一所述的构建方法。
29、通过上述技术方案,本发明实施方式提供了一种基于数字孪生的三维模型的构建方法及系统,该构建方法及系统通过结合粗建模的三维模型进行场景和设备虚拟模型的匹配,提高了构建的数字孪生模型的精细度。
30、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种基于数字孪生的三维模型的构建方法,其特征在于,所述构建方法包括:
2.根据权利要求1所述的构建方法,其特征在于,获取现场采集的变电站的点云数据,包括:
3.根据权利要求1所述的构建方法,其特征在于,根据所述粗三维模型确定场景信息和设备信息,包括:
4.根据权利要求3所述的构建方法,其特征在于,根据所述场景信息从预设的场景库中获取场景模型,包括:
5.根据权利要求1所述的构建方法,其特征在于,根据所述粗三维模型确定场景信息和设备信息,包括:
6.根据权利要求5所述的构建方法,其特征在于,根据所述设备信息从预设的设备库中获取设备模型,包括:
7.根据权利要求6所述的构建方法,其特征在于,根据所述粗三维模型确定场景信息和设备信息,包括:
8.根据权利要求7所述的构建方法,其特征在于,根据所述塔尖距离和所述最大宽度计算设备的实际宽度,包括:
9.一种基于数字孪生的三维模型的构建系统,其特征在于,所述构建系统包括处理器,所述处理器用于执行如权利要求1至8任一所述的构建方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有指令,所述指令用于被机器读取以使得所述机器执行如权利要求1至8任一所述的构建方法。
技术总结
本发明实施例提供一种基于数字孪生的三维模型的构建方法及系统,属于数字孪生模型的构建技术领域。所述构建方法包括:获取现场采集的变电站的点云数据;根据所述点云数据对所述变电站进行粗建模,以得到粗三维模型;根据所述粗三维模型确定场景信息和设备信息;根据所述场景信息从预设的场景库中获取场景模型;根据所述设备信息从预设的设备库中获取设备模型;将所述场景模型和设备模型组合,以得到数字孪生模型。通过上述技术方案,本发明实施方式提供了一种基于数字孪生的三维模型的构建方法及系统,该构建方法及系统通过结合粗建模的三维模型进行场景和设备虚拟模型的匹配,提高了构建的数字孪生模型的精细度。
技术研发人员:阳士宇,汪舒,李志浩,范叶平,汪俊,陈园园,向子昂,刘雅萌,季文博,熊飞,马广阔,关悦,马剑波,孙丽,李亦璞
受保护的技术使用者:安徽继远软件有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!