起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法与流程
本发明涉及施工设备,特别是一种起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法。
背景技术:
1、工程中起重设备在结构上(如地下室顶板,或者标准层楼板等)行走时,因为设备自重大、行走范围广且结构复杂,用常规的静力等效荷载方法复核结构承载力就存在复杂耗时且精确度不高的问题。同时,当验算确定好起重设备行走理论范围后,人工在现场画线过程容易出现偏差(人为影响或障碍物影响),造成起重设备实际行走范围和理论验算范围不符,从而带来结构安全隐患。而轮压和履带压力属于局部荷载,目前常用的计算方法是将局部荷载等效为均布荷载进行计算,不能准确的反映移动荷载作用下结构的受力,因此,工程上需要一种能够检查起重设备行走区域的画线偏差情况,且快速准确判定结构是否存在薄弱区域的方法。
技术实现思路
1、为解决现有技术中存在的问题,本发明的目的是提供一种起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,本发明可快速准确判定结构是否存在薄弱区域。
2、为实现上述目的,本发明采用的技术方案是:一种起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,包括以下步骤:
3、步骤1、利用无人机激光测量技术识别设备行走区域边界的画线,获取起重设备行走区域的坐标数据文件;
4、步骤2、对比现场起重设备实际行走区域边界和理论行走区域边界数据,判定现场放线是否存在偏差;
5、步骤3、当边界的偏差超出允许范围时,按实际现场边界重新进行结构验算;
6、步骤4、识别起重设备铭牌照片上的关键信息,调取荷载数据库中的关键数据,并自动计算出轮压荷载组或履带荷载组;
7、步骤5、计算软件读取加载程序,按照一定的加载密度,根据实际设备行走区域边界所重新确定的行走路径,自动验算结构;
8、步骤6、当相邻两轮结构验算数据偏差在允许范围内后结束加载;
9、步骤7、导出最后一轮加载下结构薄弱区域的内力及变形数据,并在有限元模型上显示所有对应位置。
10、作为本发明的进一步改进,所述步骤1具体包括以下步骤:
11、步骤1.1、建立坐标系:以相机光心为原点,建立相机坐标系;同时,在此坐标系内建立等效像素坐标系,用于后续坐标转换;
12、步骤1.2、获取转换参数:通过布尔沙模型获取将点云数据转换至成果坐标系所需要的转换参数;
13、步骤1.3、坐标转换:利用得到的转换参数,将起重设备行走区域画线的坐标数据从像素坐标系转换到相机坐标系;
14、步骤1.4、数据处理:对于转换后的坐标数据进行精度校准、去噪操作;
15、步骤1.5、数据输出:将处理后的坐标数据通过一定的格式输出。
16、作为本发明的进一步改进,所述步骤2具体包括以下步骤:
17、步骤2.1、画线操作:在点云数据中根据需要画出相应的线段,用于表示设备行走区域边界的现场实际轮廓;
18、步骤2.2、对比操作:将画出的线段与理论画线进行对比,以确定它们之间的差异;
19、步骤2.3、结果分析:根据对比结果进行分析,评估它们的相似度或差异程度。
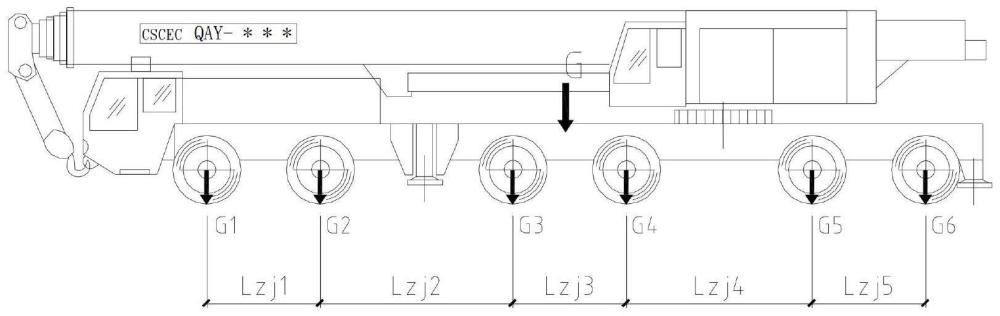
20、作为本发明的进一步改进,在步骤4中,针对汽车式移动设备,其轮压荷载组的计算方法具体如下:
21、荷载数据库中的关键数据包括属于尺寸参数的轴距lzji和轮距lj;属于重量参数的行驶状态下整机质量g、附加平衡配重质量gp和行驶状态下的轴荷gi;
22、设汽车式移动设备机车轮着地宽度为a,车轮着地长度为b,则对应每个轴荷gi的每个轮压pi=gi/2/(a*b);获得每个轴的单个轮压pi后,按轴距和轮距布置成轮压荷载组∑pi。
23、作为本发明的进一步改进,在步骤4中,针对履带式移动设备,其履带荷载组的计算方法具体如下:
24、荷载数据库中的关键数据包括属于尺寸参数的履带长度l、履带宽度b、履带中心距ljh、平衡配重重心距回转中心e和行驶状态吊臂端距回转中心r;属于重量参数的行驶状态下整机质量g、吊车臂质量gb和工作平衡配重质量gp;
25、正方行走均布压力荷载标准值:
26、n=gp+g+(ga+w);m=ga×r+gb×r/2-gp×e
27、单个履带平均面压力荷载:
28、q1=n/(2l×b)-6m/(2b×l2)
29、q2=n/(2l×b)+6m/(2b×l2);
30、侧方行走均布压力荷载标准值:
31、设侧方行走时f2压力最大,以f2为支点;
32、f1×ljh+gp×(e-ljh/2)=(g-gb-ga)×ljh/2+gb×(r/2+ljh/2)+ga×(r+ljh/2)
33、则f1=((g-gb-ga)×ljh/2+gb×(r/2+ljh/2)+ga×(r+ljh/2)-gp×(e-ljh/2))/ljh
34、则f2=gp+g-f1
35、f1侧履带平均面压力荷载:qa=f1/b/l
36、f2侧履带平均面压力荷载:qb=f2/b/l。
37、本发明的有益效果是:
38、1、高效性:本发明通过无人机激光测量技术可以快速获取现场设备行走路线与理论路线的偏差,相对传统现场测量复核,在效率上大幅提升。通过图像识别技术获取调取设备荷载库数据,相对传统的翻阅查看各类设备说明,节约了验算人员收集整理数据的时间。
39、2、准确性:本发明的结构薄弱区判定过程相当于采用“穷举法”把在设备行走路线上的所有工况都进行了计算,找出所有的结构薄弱区域。相对传统的人工选择若干“最不利工况”进行试算的方法更加准确无遗漏。本发明充分发挥了计算机算力。
技术特征:
1.一种起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,其特征在于,所述步骤1具体包括以下步骤:
3.根据权利要求2所述的起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,其特征在于,所述步骤2具体包括以下步骤:
4.根据权利要求1所述的起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,其特征在于,在步骤4中,针对汽车式移动设备,其轮压荷载组的计算方法具体如下:
5.根据权利要求1所述的起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,其特征在于,在步骤4中,针对履带式移动设备,其履带荷载组的计算方法具体如下:
技术总结
本发明公开了一种起重设备行走区域偏差检查和行走状态下结构薄弱区域判定方法,包括:识别设备行走区域边界的画线,获取起重设备行走区域的坐标数据文件;对比现场起重设备实际行走区域边界和理论行走区域边界数据,判定现场放线是否存在偏差;当边界的偏差超出允许范围时,按实际现场边界重新进行结构验算;调取荷载数据库中的关键数据,并自动计算出轮压荷载组或履带荷载组;根据实际设备行走区域边界所重新确定的行走路径,自动验算结构;当相邻两轮结构验算数据偏差在允许范围内后结束加载;导出最后一轮加载下结构薄弱区域的内力及变形数据,并在有限元模型上显示所有对应位置;本发明可快速准确判定结构是否存在薄弱区域。
技术研发人员:赵楠,朱邵辉,陈振明,徐坤,赵思远,李春田
受保护的技术使用者:中建科工集团有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!