一种人工智能遥测方法及装置与流程
本申请涉及工业安防监控,尤其涉及一种人工智能遥测方法及装置。
背景技术:
1、目前,基于可调谐半导体激光吸收光谱(tunable diode laser absorptionspectroscopy,tdlas)技术的激光甲烷遥测云台在油气行业得到广泛应用。该系统被用于油气开采现场、储运管道和加工设施等地的甲烷泄漏监测。通过实时监测甲烷浓度,可以及时发现和处理泄漏事件,减少事故风险和环境污染。然而,传统的激光甲烷遥测系统通常需要人工干预来调整测量仪器的方向和角度,以确保准确测量。同时由于不能主动区分待测区域的风险等级,因此扫描待测区域时,对所有区域均采用同样的扫描方式,当采用的扫描方式过于简单的时候,扫描存在遗漏的问题,尤其对于高风险区域,扫描遗漏可能造成严重的后果,而当采用过于严格的扫描方式的时候,对于扫描一个分区的成本,尤其是时间成本过高,将一个待测区域的所有分区都检测完,用时过长。
技术实现思路
1、本申请实施例提供一种人工智能遥测方法及装置,解决了现有技术无人工干预下不能灵活的对不同风险的待测区域采取不同的扫描方案的问题。
2、第一方面,本申请实施例提供一种人工智能遥测方法,用于甲烷泄漏检测,包含步骤:
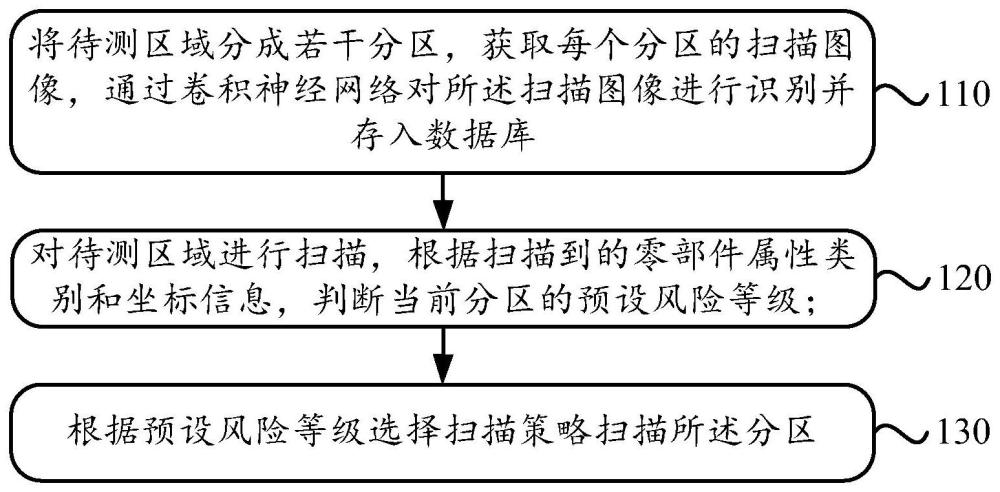
3、将待测区域分成若干分区,获取每个分区的扫描图像,通过卷积神经网络对所述扫描图像进行识别并存入数据库;所述卷积神经网络能够识别的图像属性包含零部件属性类别和坐标信息;
4、对待测区域进行扫描,根据扫描到的零部件属性类别和坐标信息,判断当前分区的预设风险等级;所述预设风险等级有对应的扫描策略。
5、在其中一个实施例中,决定所述预设风险等级的参数包含历史泄漏点空间分布、关键阀门的数量或密度、设定第一时间阈值区间的泄漏事故次数。
6、在其中一个实施例中,所述风险等级包含:发生泄漏事故频次大于第一设定阈值的区域为高风险区域;发生泄漏事故频次大于第二设定阈值小于第一设定阈值的区域为中风险区;发生泄漏事故频次小于第二设定阈值的区域为低风险区。
7、在其中一个实施例中,不同预设风险等级对应的扫描策略,其扫描的像元占比不同,风险等级越高的区域扫描其像元的占比越高。
8、在其中一个实施例中,还包含步骤:
9、从某个预设风险等级的分区集合中按照预设百分比阈值随机抽取对应数量的分区,所述分区数量向上取整;
10、对抽出的分区进行扫描;
11、从该预设风险等级的抽取队列中删除经过扫描的分区;
12、响应于多次抽取扫描流程直至分区集合中全部分区均被扫描,抽取队列中恢复删除的分区。
13、在其中一个实施例中,还包含步骤:响应于第二时间阈值区间发生泄漏,提升预设风险等级。
14、在其中一个实施例中,所述卷积神经网络能够识别的图像属性还包含人员动作和人员穿着。
15、第二方面,本申请实施例还提供一种人工智能遥测系统,用于实现第一方面任意一项实施例所述人工智能遥测方法,包含:图像识别模块,用于对待测区域进行扫描,并与模型库数据进行比对。模型库,用于作为数据库存储扫描待测区域识别的数据信息。人工智能计算模块,用于学习并识别图像属性。
16、第三方面,本申请实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面任一实施例所述的方法。
17、第四方面,本申请实施例还提供一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一实施例所述的方法。
18、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
19、本申请将人工智能技术引入场站云台监控系统,通过分析传感器数据、图像识别和智能决策等方式,实现自动提取激光甲烷遥测的目标区域并自动规划和优化巡航路径。具有自适应性和智能化的特点,能够根据场站设施或观测场景的变化,自动实时调整巡航策略。当检测到存在泄露风险区域时,系统也可以动态调整巡航路径和策略,以更好地应对泄漏情况。相较于传统系统,基于人工智能的激光甲烷遥测云台无需人工干预,显著降低了系统使用的难度和运维成本。同时,通过闭环反馈实现系统的自我迭代与进化,不断提升用户体验和测量准确性。
20、本申请在油气场站监控中的应用具有重要意义,可以提高监测效率、降低成本,并为油气行业的安全生产和环境保护做出贡献。
技术特征:
1.一种人工智能遥测方法,用于甲烷泄漏检测,其特征在于,包含步骤:
2.根据权利要求1所述人工智能遥测方法,其特征在于,决定所述预设风险等级的参数包含历史泄漏点空间分布、关键阀门的数量或密度、设定第一时间阈值区间的泄漏事故次数。
3.根据权利要求1所述人工智能遥测方法,其特征在于,所述风险等级包含:
4.根据权利要求1所述人工智能遥测方法,其特征在于,不同预设风险等级对应的扫描策略,其扫描的像元占比不同,风险等级越高的区域扫描其像元的占比越高。
5.根据权利要求1所述人工智能遥测方法,其特征在于,还包含步骤:
6.根据权利要求1所述人工智能遥测方法,其特征在于,还包含步骤:
7.根据权利要求1所述人工智能遥测方法,其特征在于,所述卷积神经网络能够识别的图像属性还包含人员动作和人员穿着。
8.一种人工智能遥测系统,其特征在于,用于实现权利要求1-7任意一项所述人工智能遥测方法,包含:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的方法。
10.一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7中任一所述的方法。
技术总结
本申请公开了一种人工智能遥测方法及装置,解决了现有技术无人工干预下不能灵活的对不同风险的待测区域采取不同的扫描方案的问题。人工智能遥测方法,包含步骤:将待测区域分成若干分区,获取每个分区的扫描图像,通过卷积神经网络对所述扫描图像进行识别并存入数据库;对待测区域进行扫描,根据扫描到的零部件属性类别和坐标信息,判断当前分区的预设风险等级;所述预设风险等级有对应的扫描策略。本申请将人工智能技术引入场站云台监控系统,实现自动提取激光甲烷遥测的目标区域并自动规划和优化巡航路径。具有自适应性和智能化的特点,能够根据场站设施或观测场景的变化,自动实时调整巡航策略。
技术研发人员:马玉林,杨帆,刘伟,汪左成,甄玉龙,陈涛,陈钇朴,张继鹏,牛奎建
受保护的技术使用者:北京无线电计量测试研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!