逆合成孔径雷达图像目标识别方法和装置与流程
本发明属于雷达,具体涉及一种逆合成孔径雷达图像目标识别方法和装置。
背景技术:
1、逆合成孔径雷达(inverse synthetic aperture radar,isar)作为一种二维高分辨手段,通过发射大带宽信号和脉冲压缩技术实现距离维的高分辨率,利用目标相对雷达转动产生的多普勒频移实现方位维的高分辨率,成为海、陆、空、天目标观测的重要途径。由于isar图像包含目标精细的物理结构信息,因此利用isar图像可以进行目标特征提取以及雷达自动目标识别,在现代军事应用中发挥着重要作用。
2、传统isar图像自动目标识别首先要凭借人工经验提取图像有效特征,然后设计分类器完成目标识别,实际上由人工定义的特征需要大量的先验知识,因此通常存在较大损失,导致isar图像的特征描述能力较差,从而影响了识别精度和效率。为解决这一问题,现有技术通过深度学习算法对isar图像指纹级特征的描述能力来推动isar图像的识别应用,但仍存在目标识别准确率不高的问题。
技术实现思路
1、本发明的目的是提供一种逆合成孔径雷达图像目标识别方法和装置、计算机设备、计算机可读存储介质,通过引入目标相对于雷达的入射视线角,将目标姿态和目标isar图像特征进行关联耦合,能够提升目标识别性能,提高目标识别准确率。
2、本发明的一个方面提供一种逆合成孔径雷达图像目标识别方法,包括:
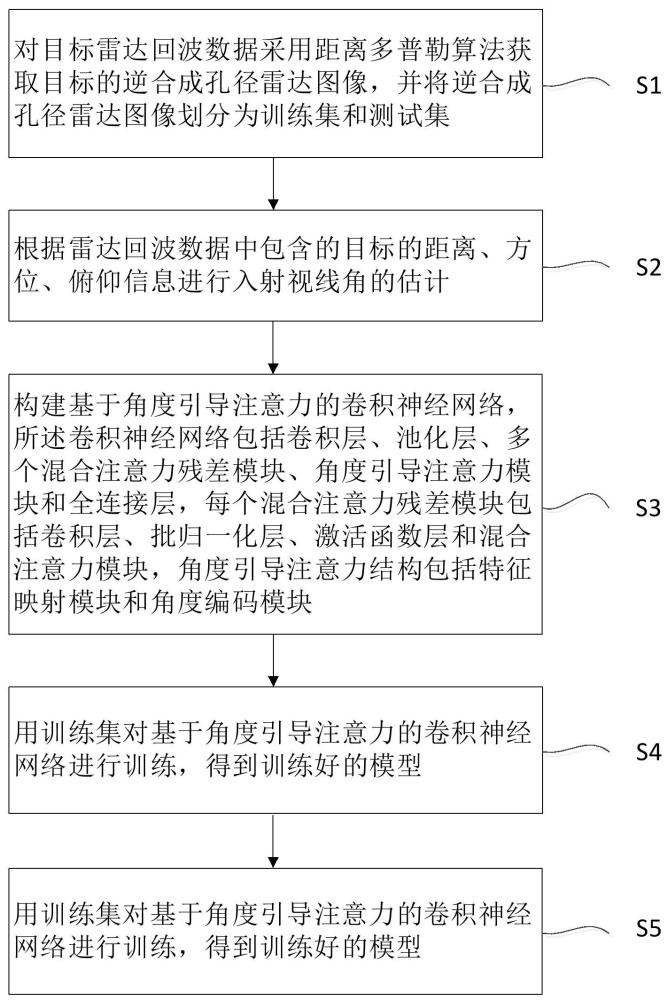
3、步骤s1:对目标雷达回波数据采用距离多普勒算法获取目标的逆合成孔径雷达图像,并将逆合成孔径雷达图像划分为训练集和测试集;
4、步骤s2:根据雷达回波数据中包含的目标的距离、方位、俯仰信息进行入射视线角的估计;
5、步骤s3:构建基于角度引导注意力的卷积神经网络,所述卷积神经网络包括卷积层、池化层、多个混合注意力残差模块、角度引导注意力模块和全连接层,每个混合注意力残差模块包括卷积层、批归一化层、激活函数层和混合注意力模块,角度引导注意力结构包括特征映射模块和角度编码模块;
6、步骤s4:用训练集对基于角度引导注意力的卷积神经网络进行训练,得到训练好的模型;
7、步骤s5:利用测试集对训练好的模型进行测试,得到逆合成孔径雷达图像的目标识别结果。
8、优选地,所述步骤s2包括:
9、步骤s21:根据目标到雷达的距离、方位角、俯仰角计算出目标的空间坐标,根据目标的空间坐标得到雷达视线方向的反方向的单位向量;
10、对目标在多个时刻的空间坐标作多项式拟合得到目标的航迹,通过求导得到目标速度,根据目标速度得到目标运动方向的单位向量;
11、计算得到雷达视线方向的反方向和目标运动方向的夹角作为入射视线角。
12、优选地,所述步骤s3包括:
13、步骤s31:依次层叠卷积层和池化层,对输入图像进行降维;
14、步骤s32:构建多个依次层叠卷积层、批归一化层、激活函数层、混合注意力模块组成的混合注意力残差模块;
15、步骤s33:构建包含角度编码模块和特征映射模块的角度引导注意力结构;
16、步骤s34:对最后一个混合注意力残差模块的输出进行平均池化,将得到的结果通过全连接层进行分类识别。
17、优选地,所述步骤s32包括:
18、将原始输入经过卷积层、批归一化层、激活函数层后得到第一特征图;
19、对第一特征图沿空间维度进行平均池化和最大池化,得到通道注意力权重,将通道注意力权重与第一特征图相乘得到通道注意力特征;
20、对通道注意力特征沿通道维度进行平均池化和最大池化,得到空间注意力权重,将空间注意力权重与通道注意力特征相乘得到混合注意力特征,作为混合注意力模块的输出;
21、将混合注意力特征和原始输入残差连接后,再通过激活函数得到混合注意力残差模块的输出特征图。
22、优选地,所述步骤s33包括:
23、将混合注意力残差模块的输出特征图作为特征映射模块的输入,通过第一个卷积层对输入作卷积操作实现通道维度的降维,在批归一化后通过激活函数构建非线性映射,再通过第二个卷积层进行卷积操作将通道数量调整与原来一致,得到输入的特征映射,作为特征映射模块的输出;
24、选取逆合成孔径雷达图像所对应的入射视线角作为角度编码模块的输入,对入射视线角进行计算得到角度编码向量,将得到的角度编码向量转发到多层感知机构建非线性映射,再通过激活函数得到角度引导注意力权重,作为角度编码模块的输出;
25、将角度编码模块的输出与特征映射结构的输出沿通道维度相乘,再与特征映射模块的输入作残差连接,得到角度引导注意力结构的输出。
26、优选地,所述步骤s4中,采用5折交叉验证的方式对基于角度引导注意力的卷积神经网络进行训练,训练损失函数采用交叉熵损失,优化器采用adam优化器。
27、本发明的另一个方面提高一种逆合成孔径雷达图像目标识别装置,包括:
28、图像获取模块,对目标雷达回波数据采用距离多普勒算法获取目标的逆合成孔径雷达图像,并将逆合成孔径雷达图像划分为训练集和测试集;
29、入射视线角估计模块,根据雷达回波数据中包含的目标的距离、方位、俯仰信息进行入射视线角的估计;
30、卷积神经网络构建模块,构建基于角度引导注意力的卷积神经网络,所述卷积神经网络包括卷积层、池化层、多个混合注意力残差模块、角度引导注意力模块和全连接层,每个混合注意力残差模块包括卷积层、批归一化层、激活函数层和混合注意力模块,角度引导注意力结构包括特征映射模块和角度编码模块;
31、训练模块,用训练集对基于角度引导注意力的卷积神经网络进行训练,得到训练好的模型;
32、测试模块,利用测试集对训练好的模型进行测试,得到逆合成孔径雷达图像的目标识别结果。
33、本发明的又一个方面提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法的步骤。
34、本发明的又一个方面提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述的方法的步骤。
35、本发明以上方面的逆合成孔径雷达图像目标识别方法和装置、计算机设备、计算机可读存储介质,通过引入目标相对于雷达的入射视线角,将目标姿态和目标isar图像特征进行关联耦合,能够提升目标识别性能,提高目标识别准确率。
技术特征:
1.一种逆合成孔径雷达图像目标识别方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述步骤s2包括:
3.如权利要求1或2所述的方法,其特征在于,所述步骤s3包括:
4.如权利要求3所述的方法,其特征在于,所述步骤s32包括:
5.如权利要求3或4所述的方法,其特征在于,所述步骤s33包括:
6.如权利要求1-5中任一项所述的方法,其特征在于,所述步骤s4中,采用5折交叉验证的方式对基于角度引导注意力的卷积神经网络进行训练,训练损失函数采用交叉熵损失,优化器采用adam优化器。
7.一种逆合成孔径雷达图像目标识别装置,其特征在于,包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-6中任一项所述的方法的步骤。
技术总结
本发明公开了一种逆合成孔径雷达图像目标识别方法和装置,所述逆合成孔径雷达图像目标识别方法包括:对目标雷达回波数据采用距离多普勒算法获取目标的逆合成孔径雷达图像,并将逆合成孔径雷达图像划分为训练集和测试集;根据雷达回波数据中包含的目标的距离、方位、俯仰信息进行入射视线角的估计;构建基于角度引导注意力的卷积神经网络;用训练集对基于角度引导注意力的卷积神经网络进行训练,得到训练好的模型;利用测试集对训练好的模型进行测试,得到逆合成孔径雷达图像的目标识别结果。本发明通过引入目标相对于雷达的入射视线角,将目标姿态和目标ISAR图像特征进行关联耦合,能够提升目标识别性能,提高目标识别准确率。
技术研发人员:李家宽,叶春茂,余继周,申伦豪,冯博
受保护的技术使用者:北京无线电测量研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!