车道线聚类识别的方法及系统与流程
本发明涉及智能汽车领域,具体而言,涉及一种车道线聚类识别的方法及系统。
背景技术:
1、在现代汽车工业中,自动驾驶技术的迅猛发展已经引领了整个交通领域的变革。随着自动驾驶车辆的普及,辅助驾驶系统逐渐成为车辆标配,为驾驶员提供了更高水平的安全性和便利性。在这一技术革新的推动下,车辆的感知与决策能力得到显著提升,然而,要实现真正意义上的自动驾驶,需要高度精准的车道线检测技术作为基础,确保车辆能够准确识别道路并作出合适的行驶决策。
2、随着自动驾驶技术的不断进步,车道线检测系统已经在车辆感知系统中扮演着关键的角色。这项技术通过摄像头或传感器等设备,识别道路上的车道线,并将其转化为数字信号供车辆系统分析使用。然而,在复杂多变的道路环境中,例如弯道、交叉口等特殊情况下,现有的车道线检测系统往往面临精度不足、鲁棒性差的问题。特别是在车道线聚类过程中,系统难以准确地将车道线区分开来,导致输出结果的不稳定性,从而影响了自动驾驶系统的可靠性和安全性。
3、因此,在自动驾驶技术的发展过程中,车道线聚类问题成为一个亟待解决的挑战。当前技术在特殊道路场景下的车道线聚类效果较差,这使得车辆在处理弯道线等情况时难以做出更为准确的判断和反应。
技术实现思路
1、本发明实施例提供了一种车道线聚类识别的方法及系统。
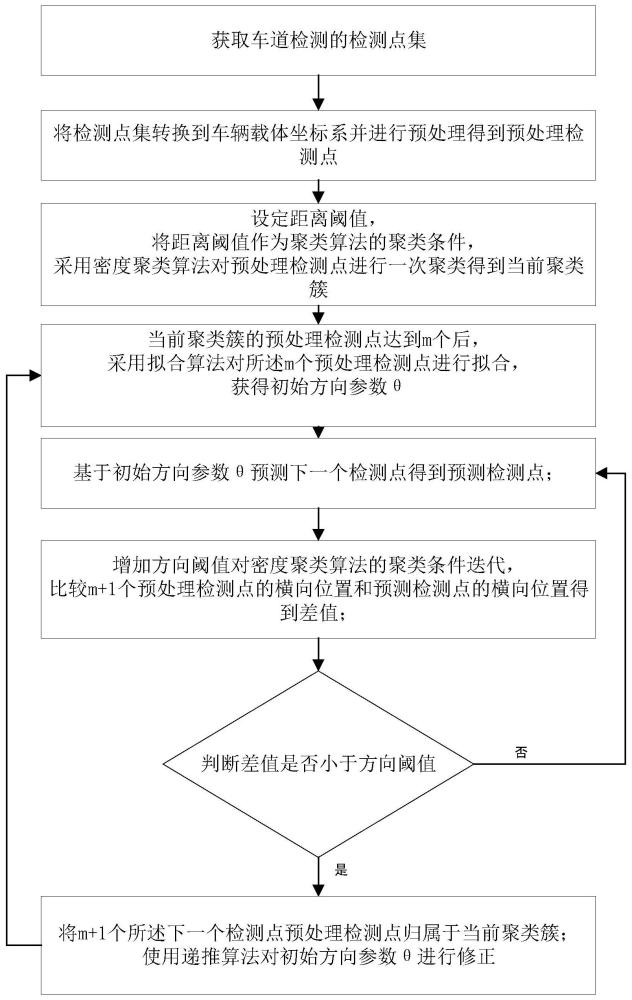
2、根据本发明的一个实施例,提供了一种车道线聚类识别的方法,方法包括:获取车道线的检测点集;将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点;设定距离阈值并将距离阈值作为聚类算法的聚类条件,采用密度聚类算法对预处理检测点进行一次聚类得到当前聚类簇;当前聚类簇的预处理检测点达到m个后,采用拟合算法对m个预处理检测点进行拟合,获得初始方向参数θ,m的值参照车道线检测点密集程度来设定;基于初始方向参数θ预测下一个检测点得到预测检测点;增加方向阈值对所述密度聚类算法的聚类条件迭代,比较第m+1个预处理检测点的横向位置和预测检测点的横向位置得到差值,判断差值是否小于方向阈值,如果差值小于方向阈值,则将所述第m+1个预处理检测点归属于当前聚类簇;使用递推算法对初始方向参数θ进行修正得到修正方向参数,并基于修正方向参数继续对所述密度聚类算法的聚类条件迭代,再对第m+2个预处理检测点进行再聚类。
3、可选的,获取车道线的检测点集包括:通过深度学习模型或图像处理模型获取车道线的检测点集,检测点集包括图像中所涉及的所有n条道路车道线的多个检测点,每个检测点包含其在图像中的位置信息(ui,vi),i=1,2…n。
4、可选的,将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点包括:对相机进行动态或静态标定获取相机内外参;使用相机内外参将多个检测点投影至车辆载体坐标系下,检测点的位置信息由(ui,vi)转为(xi,yi),i=1,2…n,其中x表示检测点对应的纵坐标值,y表示检测点对应的横坐标值。
5、可选的,将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点还包括:对车辆载体坐标系下的所有检测点,依照其位置信息中纵坐标值的大小从小到大进行排序;对各个检测点的位置信息中纵坐标值进行压缩以使其适应密度聚类算法的欧式距离阈值设定。
6、可选的,初始方向参数θ=[a,b],y=ax+b,方向阈值为δy,判断差值是否小于方向阈值的公式为(axi+b)-yi<δy。
7、可选的,使用递推算法对初始方向参数θ进行修正得到修正方向参数的公式为:
8、
9、
10、
11、其中,为第k时刻再聚类的预处理检测点的纵向坐标表示矩阵的转置,yk为第k时刻再聚类的预处理检测点的横向坐标[yi],kk为第k时刻的递推增益,pk为协方差矩阵,为第k时刻得到的用于再聚类的修正方向参数,为前一时刻得到的修正方向参数或者初始方向参数θ。
12、可选的,设定距离阈值并将距离阈值作为聚类算法的聚类条件包括:采用查表方式设定距离阈值,距离阈值随着纵向距离增大而增大。
13、根据本发明的另一个实施例,提供了一种基于单目摄像头的侧向车道车距测算的系统,包括相机和控制器,其中,相机获取车道线图像;控制器通过车道线图像获取车道线的检测点集;将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点;设定距离阈值并将距离阈值作为聚类算法的聚类条件,采用密度聚类算法对预处理检测点进行一次聚类得到当前聚类簇;当前聚类簇的预处理检测点达到m个后,采用拟合算法对m个预处理检测点进行拟合,获得初始方向参数θ,m的值参照车道线检测点密集程度来设定;基于初始方向参数θ预测下一个检测点得到预测检测点;增加方向阈值对密度聚类算法的聚类条件迭代,比较m+1个预处理检测点的横向位置和预测检测点的横向位置得到差值,判断差值是否小于方向阈值,如果差值小于方向阈值,则将m+1个预处理检测点归属于当前聚类簇;使用递推算法对初始方向参数θ进行修正得到修正方向参数,并基于修正方向参数继续对密度聚类算法的聚类条件迭代,再对m+2个预处理检测点进行再聚类。
14、根据本发明的又一个实施例,还提供了一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。
15、根据本发明的又一个实施例,还提供了一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项方法实施例中的步骤。
16、通过本发明,提高了车道线聚类的准确性和鲁棒性。通过将检测点集转换到车辆载体坐标系并进行预处理,可以减少因视角和距离变化带来的误差,提高了聚类的准确性。同时,使用密度聚类算法作为基础,结合方向性判断,使得该方法能够有效处理车道线在不同驾驶环境(如直路、弯道等)中的变化,增强了对复杂场景的适应能力。此外,采用递推算法对方向参数进行实时修正,使得聚类过程更加灵活和准确。这种动态调整机制意味着算法能够根据新加入的检测点自我调整,确保聚类结果始终与车道线的实际走向保持一致。这不仅提高了聚类的精确度,也大大增强了算法在面对车道线检测点密集或稀疏、以及车道线形状多变的情况下的鲁棒性。
技术特征:
1.一种车道线聚类识别的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取车道线的检测点集包括:通过深度学习模型或图像处理模型获取车道线的检测点集,所述检测点集包括图像中所涉及的所有n条道路车道线的多个检测点,每个所述检测点包含其在图像中的位置信息(ui,vi),i=1,2...n。
3.根据权利要求2所述的方法,其特征在于,所述将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点包括:
4.根据权利要求3所述的方法,其特征在于,所述将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点还包括:
5.根据权利要求3所述的方法,其特征在于,所述初始方向参数θ=[a,b],y=ax+b,方向阈值为δy,判断差值是否小于方向阈值的公式为(axi+b)-yi<δy。
6.根据权利要求1所述的方法,其特征在于,所述使用递推算法对初始方向参数θ进行修正得到修正方向参数的公式为:
7.根据权利要求1所述的方法,其特征在于,设定距离阈值并将距离阈值作为聚类算法的聚类条件包括:采用查表方式设定所述距离阈值,所述距离阈值随着纵向距离增大而增大。
8.一种基于单目摄像头的侧向车道车距测算的系统,其特征在于,包括相机和控制器,其中,
9.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行权利要求1至7任一项中所述的方法。
10.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至7任一项中所述的方法。
技术总结
本发明提供了一种车道线聚类识别的方法及系统,其中方法包括:获取车道线的检测点集;将检测点集转换到车辆载体坐标系并进行预处理得到预处理检测点;设定距离阈值并将距离阈值作为聚类算法的聚类条件,采用密度聚类算法对预处理检测点进行一次聚类得到当前聚类簇;增加方向阈值对密度聚类算法的聚类条件迭代,使用递推算法对初始方向参数进行修正得到修正方向参数,并基于修正方向参数继续对密度聚类算法的聚类条件迭代,再对预处理检测点进行再聚类。采用本发明的车道线聚类识别,解决了弯道异形线等场景中车道线聚类效果差的问题,相较单纯基于密度的聚类算法有更好的聚类效果及鲁棒性,并且缩短了运算时间。
技术研发人员:韩华
受保护的技术使用者:清智汽车科技(苏州)有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!