道路标线评估方法、装置、设备、存储介质及程序产品与流程
本申请涉及高精度地图,尤其涉及一种道路标线评估方法、装置、设备、存储介质及程序产品。
背景技术:
1、随着自动驾驶技术的发展以及对自动驾驶导航的精细要求,高精度地图是汽车智能化依赖的核心技术之一,道路标线是组成交通路网的基础要素,所以对于道路标线的几何精度进行评判在高精度地图的绘制中显得尤为重要。
2、现有技术中,对道路标线的几何精度评判方法是通过计算道路标线中某一单点的坐标值与激光点云获取的坐标值的差值,以判定该道路标线是否满足精度要求。
3、但是,如果仅比较道路标线上某一点是否满足精度要求,评判的准确率较低;如果取道路标线上多点分别进行精度比较时,通过利用多点的精度高低,对整条道路标线进行评价,可能会导致道路标线几何精度的评定存在模糊性。
技术实现思路
1、本申请提供一种道路标线评估方法、装置、设备、存储介质及程序产品,用于解决现有道路标线几何精度的评定存在模糊性的问题。
2、第一方面,本申请提供一种道路标线评估方法,所述方法包括:
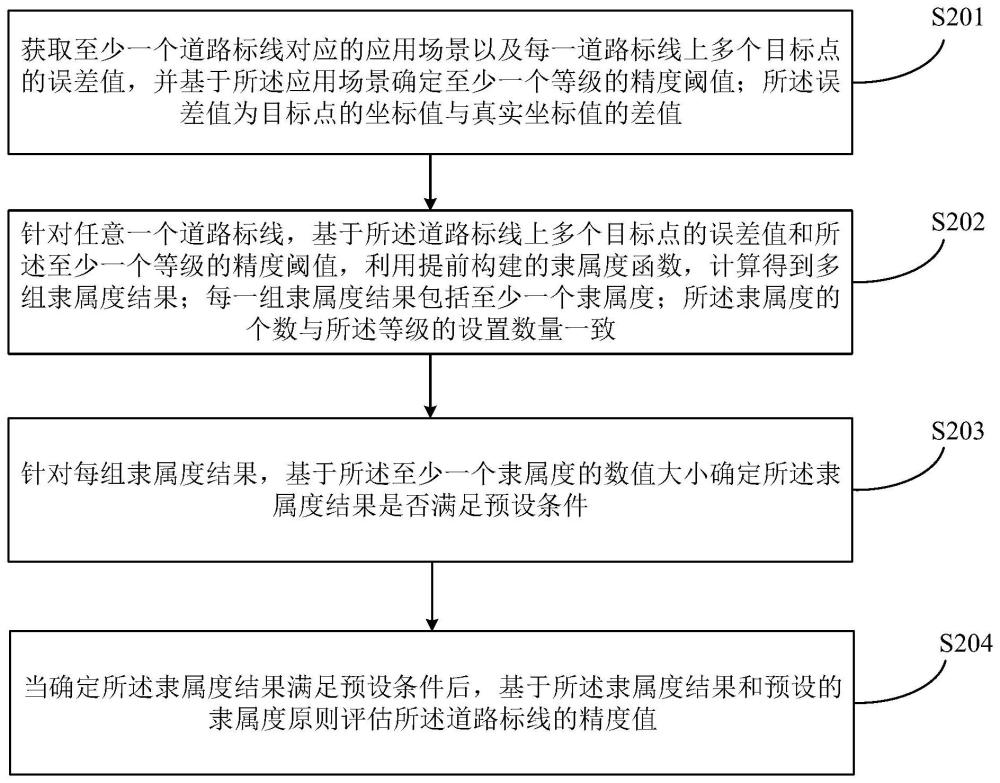
3、获取至少一个道路标线对应的应用场景以及每一道路标线上多个目标点的误差值,并基于所述应用场景确定至少一个等级的精度阈值;所述误差值为目标点的坐标值与真实坐标值的差值;
4、针对任意一个道路标线,基于所述道路标线上多个目标点的误差值和所述至少一个等级的精度阈值,利用提前构建的隶属度函数,计算得到多组隶属度结果;每一组隶属度结果包括至少一个隶属度;所述隶属度的个数与所述等级的设置数量一致;
5、针对每组隶属度结果,基于所述至少一个隶属度的数值大小确定所述隶属度结果是否满足预设条件;
6、当确定所述隶属度结果满足预设条件后,基于所述隶属度结果和预设的隶属度原则评估所述道路标线的精度值。
7、可选的,获取至少一个道路标线对应的应用场景以及每一道路标线上多个目标点的误差值,包括:
8、针对任意一个道路标线,获取所述道路标线对应的应用场景,以及每隔预设采样距离,采集所述道路标线上多个目标点;
9、计算所述道路标线上多个目标点的坐标值,并获取所述多个目标点的真实坐标值;所述真实坐标值为基于激光点云获取的坐标值;
10、基于所述多个目标点的坐标值和所述真实坐标值计算所述多个目标点的误差值。
11、可选的,所述隶属度函数基于三角模糊函数构建;所述隶属度函数的构建过程包括:
12、基于任意相邻两个等级的精度阈值,确定每一等级的阈值区间;
13、针对任一个等级,基于三角模糊函数和所述等级的阈值区间构建对应的隶属函数。
14、可选的,基于所述至少一个隶属度的数值大小确定所述隶属度结果是否满足预设条件,包括:
15、针对每一个隶属度,判断所述隶属度的数值大小是否小于或等于第一阈值,以确定所述隶属度结果是否满足预设条件;
16、和/或,针对每一个隶属度,判断所述隶属度的数值大小与相邻隶属度的数值大小之差是否小于或等于第二阈值,以确定所述隶属度结果是否满足预设条件。
17、可选的,所述预设的隶属度原则为最大隶属度原则;基于所述隶属度结果和预设的隶属度原则评估所述道路标线的精度值,包括:
18、基于所述应用场景为所述多组隶属度结果设置第一权重值,并基于所述多组隶属度结果的第一权重值和每一隶属度结果的至少一个隶属度,利用加权算法计算得到至少一个第一隶属度;
19、基于所述最大隶属度原则确定所述至少一个第一隶属度中的最大值,得到所述道路标线的精度值。
20、可选的,所述方法还包括:
21、当确定所述隶属度结果不满足预设条件后,确定所述隶属度结果为异常值;
22、为所述异常值设置第二权重值,并为所述多组隶属度结果中除异常值外的所述隶属度结果设置第三权重值,基于所述多组隶属度结果、所述第二权重值和所述第三权重权值,利用加权算法计算得到至少一个第二隶属度;所述第二权重值小于所述第三权重值;
23、基于所述最大隶属度原则确定所述至少一个第二隶属度中的最大值,得到所述道路标线的精度值。
24、可选的,所述方法还包括:
25、获取人工输入的至少一个道路标线对应的测量精度,计算所述测量精度与所述道路标线的精度值之差,得到比较结果;
26、当确定所述比较结果大于或等于第三阈值后,生成提示信息,以提示对所述道路标线的精度值进行修正。
27、第二方面,本申请提供一种道路标线评估装置,所述装置包括:
28、获取模块,用于获取至少一个道路标线对应的应用场景以及每一道路标线上多个目标点的误差值,并基于所述应用场景确定至少一个等级的精度阈值;所述误差值为目标点的坐标值与真实坐标值的差值;
29、计算模块,用于针对任意一个道路标线,基于所述道路标线上多个目标点的误差值和所述至少一个等级的精度阈值,利用提前构建的隶属度函数,计算得到多组隶属度结果;每一组隶属度结果包括至少一个隶属度;所述隶属度的个数与所述等级的设置数量一致;
30、确定模块,用于针对每组隶属度结果,基于所述至少一个隶属度的数值大小确定所述隶属度结果是否满足预设条件;
31、评估模块,用于当确定所述隶属度结果满足预设条件后,基于所述隶属度结果和预设的隶属度原则评估所述道路标线的精度值。
32、第三方面,本申请提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
33、所述存储器存储计算机执行指令;
34、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面中任一项所述的方法。
35、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面中任一项所述的方法。
36、第五方面,本申请提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如第一方面中任一项所述的方法。
37、综上所述,本申请提供一种道路标线评估方法、装置、设备、存储介质及程序产品,可以通过获取道路标线上所有点的误差值,并获取道路标线的应用场景,进一步的,基于应用场景确定等级分类的标准,得到至少一个等级的精度阈值,进而基于提前建立的隶属度函数,通过编程实现隶属度函数的自动计算与结果输出,即通过将误差值和精度阈值,输入到隶属度函数对应的算法中,得到隶属度结果,进而通过该隶属度结果中的隶属度的数值大小对某一个道路标线的精度做出评判,得到道路标线的精度值;这样,本申请利用隶属度函数的计算方法,可为多点线段的评判提供依据,通过综合道路标线上所有点的误差值,以及考虑所有误差值的隶属度,可以综合评判道路标线的精度值,提高道路标线几何精度评定的准确性。
技术特征:
1.一种道路标线评估方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取至少一个道路标线对应的应用场景以及每一道路标线上多个目标点的误差值,包括:
3.根据权利要求1所述的方法,其特征在于,所述隶属度函数基于三角模糊函数构建;所述隶属度函数的构建过程包括:
4.根据权利要求1所述的方法,其特征在于,基于所述至少一个隶属度的数值大小确定所述隶属度结果是否满足预设条件,包括:
5.根据权利要求1所述的方法,其特征在于,所述预设的隶属度原则为最大隶属度原则;基于所述隶属度结果和预设的隶属度原则评估所述道路标线的精度值,包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,所述方法还包括:
8.一种道路标线评估装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;
10.一种计算机可读存储介质/计算机程序产品,其特征在于,所述计算机可读存储介质存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1-7中任一项所述的方法;
技术总结
本申请提供一种道路标线评估方法、装置、设备、存储介质及程序产品,方法包括:获取道路标线的应用场景以及每一道路标线上多个目标点的误差值,基于应用场景确定至少一个等级的精度阈值;针对任意一个道路标线,基于目标点的误差值和至少一个等级的精度阈值,利用提前构建的隶属度函数,计算得到多组隶属度结果;每组隶属度结果包括至少一个隶属度;针对每组隶属度结果,基于至少一个隶属度的数值大小确定隶属度结果是否满足预设条件;若是,基于隶属度结果和预设的隶属度原则评估道路标线的精度值,这样,可以综合道路标线上所有点的误差值,考虑所有误差值的隶属度,进而综合评判道路标线的精度值,提高道路标线几何精度评定的准确性。
技术研发人员:杨昊宇,王平,唐丽平,赵婧
受保护的技术使用者:武汉四维图新科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!