一种基于激光点云的植被分割效果评价方法与流程
本发明涉及效果评价技术,具体涉及一种基于激光点云的植被分割效果评价方法。
背景技术:
1、lidar(light detection and ranging)是一种新兴的对地观测技术,其提供了一种能够快速、高精度、实时地获取地表三维信息的技术手段,与传统的观测技术不同,lidar获取的是三维空间里的大量地表特征点,能够准确地提供地面及地物的空间位置信息,现在已经广泛地应用于数字测绘、林业监测、资源普查等多个方面。由于lidar获取的是整个观测区域的点云数据,所以lidar点云的属性解析和类别辨别对于lidar的应用效果有着重要的意义,因此地物提取成为了lidar后续处理中的重要内容,而植被的提取和分析是其中的一个研究热点。准确并且完整地获取植被数据在在许多学科邻域都有着非常重要的地位,其被广泛应用于生物量和碳量的估计、都市生态评估等诸多方面,所以如何有效地从原始lidar数据中准确、有效地获取植被点具有重要的理论价值和实际价值。
2、现有的激光点云在进行植被分割在进行使用时,通过将激光扫描点云转化为强度影像,对激光点云强度影像中的梯度场和光学影像的兴趣边缘进行提取,并将其作为配准基元进行优化配准,以边缘的特征点为控制点,利用薄板样条模型进行配准,纠正了影像的非刚性变形,但该方法只能实现单幅影像与三维激光扫描点云配准,且针对纹理特征不丰富、不平坦的区域适用性差。
技术实现思路
1、本发明的目的是提供一种基于激光点云的植被分割效果评价方法,以解决现有技术中的上述不足之处。
2、为了实现上述目的,本发明提供如下技术方案:一种基于激光点云的植被分割效果评价方法,包括以下步骤:
3、s1,激光点云生成;
4、s2,影相机径向色差预补偿相位值计算;
5、s3,影像点云重建;
6、s4,摄影点云与三维激光点云粗配准;
7、s5,摄影点云与三维激光点云精配准。
8、进一步地,所述计算影相机径向色差预补偿相位值的方法为:
9、在图像色彩采集模块像素坐标系下,红绿蓝颜色通道中任一点均对应着四个相位值:lcd显示垂直条纹相位lcd水平垂直条纹相位lcd反射垂直条纹相位和lcd反射水平条纹相位取此时绿色通道为标准相位此时红色通道理想相位为蓝色通道的理想相位为且红色通道此时蓝色通道同理可得利用红色通道和蓝色通道的理想相位得到红色通道和蓝色通道的预补偿相位即将其理想相位在绿色通道lcd反射条纹相位中的对应相位值,此过程是对红色通道和蓝色通道提前产生偏移,其红色通道和蓝色通道补偿相位为和
10、进一步地,所述步骤s3中影像点云的具体重建方法为:
11、a1,重叠多视序列影像;
12、a2,核线影像生成;
13、a3,匹配代价计算;
14、a4,匹配代价聚合;
15、a5,初始视差图生成;
16、a6,确定视差图搜索范围;
17、a7,视差图精化;
18、a8,粗匹配点生成;
19、a8,误匹配点剔除。
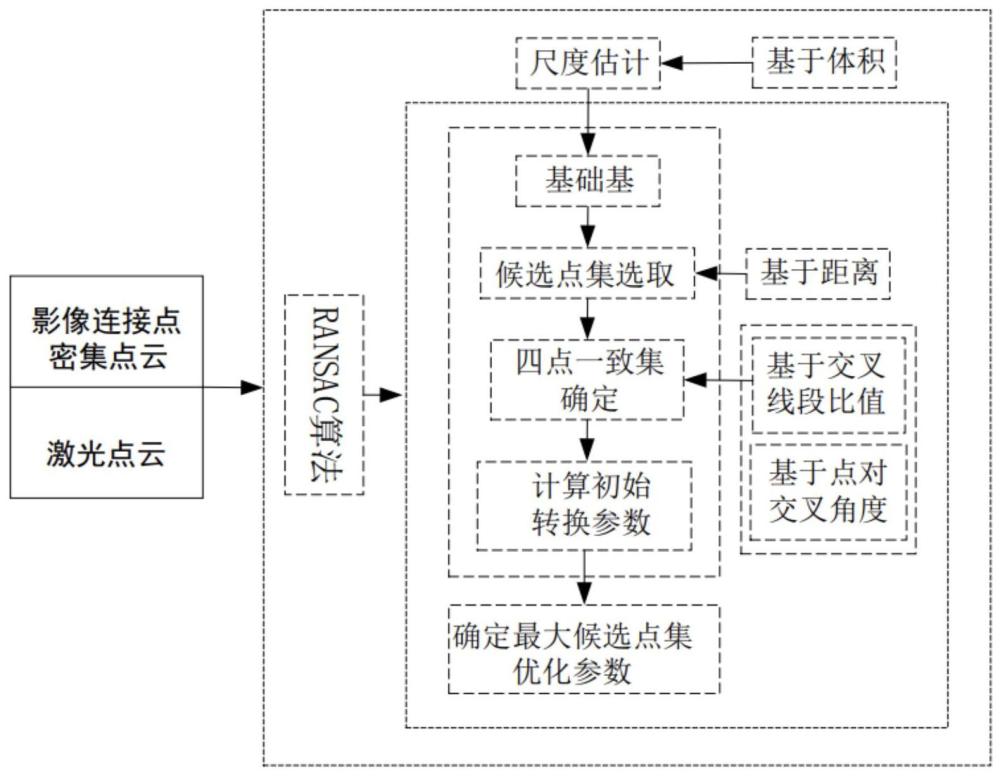
20、进一步地,所述步骤s3中的具体方法为:
21、b1,进行尺度估计,即基于影像点云体积和激光点云体积,计算尺度因子;
22、b2,将影像点云和激光点云通过rasanc算法计算转换参数,其中具体方法为:
23、b21,选取合适的四点共面基准基;
24、b22,基于距离进行候选点集选取;
25、b23,基于交叉线段比值进行四点一致集确定;
26、b24,计算初始转换参数;
27、b3,确定最大候选点集优化参数,作为最佳模型参数。
28、进一步地,所述步骤s4中的具体方法为:
29、c1,点-点距离约束的非刚性配准,其中包括:
30、c11,非刚性几何配准模型构建;
31、c12,刚性与非刚性交替配准;
32、c13,精度评定;
33、c2,基于最邻近曲面约束的非刚性配准,其中包括:
34、c21,非刚性几何配准模型构建;
35、c22,最邻近曲面配准;
36、c23,精度评定。
37、进一步地,所述步骤c21的具体步骤为:
38、d1,将相机的畸变差参数、影像粗配准转换后的外方位元素、像主点和主距作为影像和三维点云配准参数的初始值;
39、d2,判断距离误差足够小时,执行步骤d6,若判断结果为距离误差不够小时执行步骤d3;
40、d3,构建基于曲面约束的光束法平差方程并不断迭代;
41、d4,调整影像连接点的位置及影像内外方位参数;
42、d5,直到参数变化足够小时执行步骤d6;
43、d6,结束迭代,此时的参数为最后精配准获取的参数。
44、进一步地,所述步骤c21的具体方法为:
45、e1,对任意影像稀疏重建生成的三维点云,采用kd树构建数据结构模型,利用最邻近算法,在三维激光点云中搜索与其邻近的n个点,并对这n个点进行曲面拟合,这n个点拟合的曲面拟合逼近物体的真是表面,这个曲面可作为最邻近曲面,当两点云最佳套合时,激光点云中的点落在对应的最邻近点所拟合的曲面上;
46、e2,当激光点云与影像点云精配准后,影像三维点云中每一个三维点都应落在其对应的最邻近曲面上,影像三维点坐标、像点坐标、影像的内外方位元素、畸变参数应满足摄影测量中的共线条件方程;
47、e3,泰勒级数改写为线性方程,转化为最小二乘问题。
48、进一步地,所述步骤c22的具体方法为:
49、f1,在像点观测的初始权中,像点方差,其中为单位权方差,像点方差受影像匹配精度的影响,因此像点观测的方差可以用像点匹配的方差代替;
50、f2,最邻近曲面虚拟观测初始权其中为影像三维点与最邻近曲面偏离方差;
51、f3,每次平差迭代过程中,分别计算上次平差后的值,令式中n1表示像点观测方程的个数,vtpiv则在每次平差迭代中,令则
52、与现有技术相比,本发明提供的一种基于激光点云的植被分割效果评价方法,基于点-点约束,构造了一个非刚性几何配准的数学模型,该模型以最近的相邻表面为约束,并结合摄影测量共线性方程式,并对其进行迭代求解从而实现图像和激光点云的精确几何配准。该方法解决了在两个三维点集的配准中确定同名点难的问题,同时通过共线条件方程可以解决由相机畸变引起的非刚性变形的问题。
技术特征:
1.一种基于激光点云的植被分割效果评价方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述计算影相机径向色差预补偿相位值的方法为:
3.根据权利要求1所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述步骤s3中影像点云的具体重建方法为:
4.根据权利要求1所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述步骤s3中的具体方法为:
5.根据权利要求1所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述步骤s4中的具体方法为:
6.根据权利要求4所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述步骤c21的具体步骤为:
7.根据权利要求4所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述步骤c21的具体方法为:
8.根据权利要求4所述的一种基于激光点云的植被分割效果评价方法,其特征在于,所述步骤c22的具体方法为:
技术总结
本发明公开了一种基于激光点云的植被分割效果评价方法,涉及效果评价领域,包括以下步骤:S1,激光点云生成;S2,影相机径向色差预补偿相位值计算;S3,影像点云重建;S4,摄影点云与三维激光点云粗配准;S5,摄影点云与三维激光点云精配准;本发明基于点‑点约束,构造了一个非刚性几何配准的数学模型,该模型以最近的相邻表面为约束,并结合摄影测量共线性方程式,并对其进行迭代求解从而实现图像和激光点云的精确几何配准。该方法解决了在两个三维点集的配准中确定同名点难的问题,同时通过共线条件方程可以解决由相机畸变引起的非刚性变形的问题。
技术研发人员:龚有军,张坤,陈安安,刘学,朱映洁,谢荣坤,周振宇,揭添羽
受保护的技术使用者:中国能源建设集团广东省电力设计研究院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!