一种微纳卫星群多视角空间目标感知方法与流程
本发明涉及空间探测,具体涉及一种微纳卫星群多视角空间目标感知方法。
背景技术:
1、伴随着日益频繁的空间探索活动,人造卫星因故障或燃料耗尽而失效的现象也愈加常见,导致地球轨道环境愈加复杂,这将严重影响人类对空间探测活动的开展。如何避免航天器的碰撞,抑制空间环境的复杂度,这需要对空间中航天器、空间碎片、小行星等以非合作为主的空间目标运动态势进行感知和预报。
2、随着微小卫星技术的进步,空间目标感知系统逐渐向小型化、分布式、高机动三大方向发展。利用卫星编队及星座等多星联合组网方式观测跟踪空间非合作目标,可以有效扩充观测信息,提高跟踪精度,降低系统成本,增强系统的抗风险性,是天基空间态势感知技术的重要发展趋势之一。因此,研究基于微纳卫星群的空间非合作目标多模态信息融合与协同感知技术具有重要的意义。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提出一种微纳卫星群多视角空间目标感知方法,能够基于多星多视角间的协同、共享和传递,实现对空间目标的感知。
2、为了实现以上目的,本发明通过以下技术方案实现:
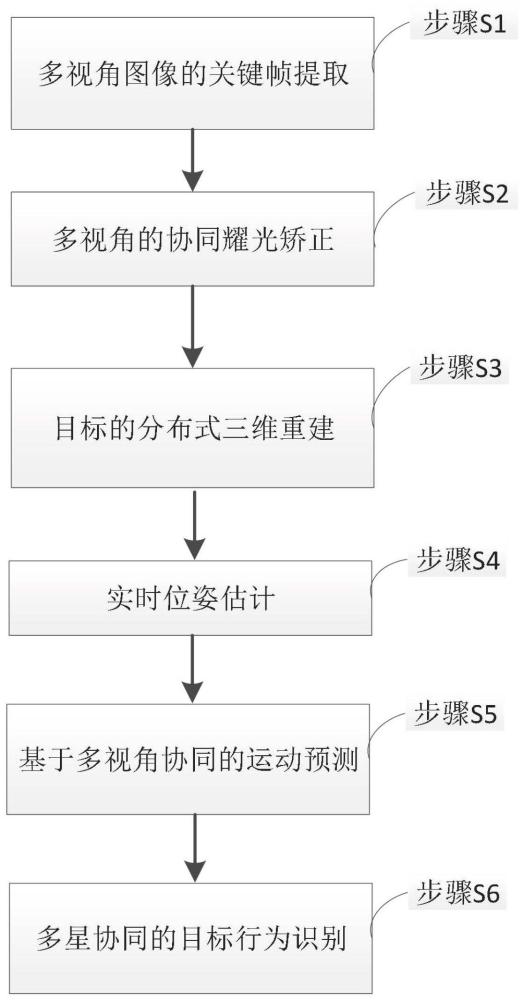
3、一种微纳卫星群多视角空间目标感知方法,包括:通过微纳卫星群对空间目标进行多视角拍摄;对拍摄的多视角图像进行矫正与补全;根据所述多视角图像对所述空间目标进行分布式三维模型重建;对所述空间目标进行实时位姿估计;对所述空间目标进行运动预测;对所述空间目标的行为识别。
4、优选地,通过微纳卫星群对空间目标进行多视角拍摄,包括:采用多星协同的测量方式,每颗微纳卫星配置相机,微纳卫星以空间目标为中心分布式绕飞,采用球形分布策略,绕飞过程中每颗微纳卫星采集空间目标的图像;相机的采样设置频率;对于一段时间获得的大量图像,使用基于视角间的orb特征匹配数量作为阈值的关键帧图像约简表征,当用于前后帧匹配的orb特征少于设定值时,将此帧定义为关键帧,删去前后冗余帧。
5、优选地,对拍摄的多视角图像进行矫正与补全,包括:采用加权多模态图像直方图分析,联合彩色图与深度图的直方图定量的分析每个视角的耀光程度并进行分类;根据多视角图像数据耀光程度,针对性的对多视角图像进行矫正与补全处理。
6、进一步地,根据多视角图像数据耀光程度,针对性的对多视角图像进行矫正与补全处理,包括:对于轻微耀光的图像数据,协同视觉传感器的彩色图与深度传感器的深度图,采用基于明暗恢复形状的方法,恢复深度图数据;对于严重耀光的图像数据,协同多星多视角双模传感数据,采用模型重构融合与投影的方法,恢复深度与彩色图。
7、优选地,根据所述多视角图像对所述空间目标进行分布式三维模型重建,包括:多个微纳卫星按照指定布局规划漂浮在空间目标周围,单个微纳卫星完成自身局部视角的三维模型重建工作;采用顺序局部模型配准重建非融合策略,将每个微纳卫星重建的子模型进行数据融合修补,从而完成整个空间目标模型的构建工作。
8、进一步地,所述单个微纳卫星完成自身局部视角的三维模型重建工作,包括:基于fpfh的点云粗配准、icp精配准、局部回环检测与优化以及tsdf表面重建。
9、优选地,对所述空间目标进行实时位姿估计,包括:选用基于特征匹配的配准算法和基于穷举搜索的配准算法,进行位姿估计的粗配准;进行精配准细化位姿估计。
10、进一步地,选用基于特征匹配的配准算法和基于穷举搜索的配准算法,进行位姿估计的粗配准,包括:对已经重建完成的目标进行离线的全局点对特征提取,以二进制文件保存至本地,将得到的需要估计位姿的点云在线提取全局点对特征,以及从本地文件中加载模型点对特征数据,进行对比和投票,采用迭代最近点方法进行优化,输出精确的结果;采用对已知点云构造多个点作为基,然后在需要进行配准的点云中穷举满足要求的对应点分别做刚性变换,最终从上述刚性变换中选出能够使最多点重合的刚性变换作为点云位姿估计的值;粗配准后,得到后续精配准所需要的初始点云位姿,使用icp算法优化位姿估计的结果,得到所需的点云。
11、优选地,对所述空间目标进行运动预测,包括:将多个微纳卫星视角获得的数据映射到公共平面,得到空间目标信息;利用融合后的空间目标信息进行运动参数估计,同时估计出空间目标的姿态、角速度和全部惯性参数;设计无迹卡尔曼滤波器和扩展卡尔曼滤波器的高效混合卡尔曼滤波器对空间目标进行运动预测。
12、优选地,对所述空间目标的行为识别,包括:设计一种加速度时间序列分析的特征提取方法;提取的特征值序列作为输入对隐马尔科夫模型进行训练识别;将长短时记忆模型引入空间目标运动行为识别系统的模型训练和识别。
13、本发明在使用过程中具有如下优点:
14、本发明提出的微纳卫星群多视角空间目标感知方法,由多颗微纳卫星携带轻小低功耗敏感器,对空间目标实施多模式协同观测,通过多源观测信息的协同融合处理,实现更准确、更可靠、更快速、更灵活的感知测量与相对运动估计,实现对空间目标的感知。
15、本发明提出对拍摄的多视角图像进行矫正与补全,增强了拍摄图像的清晰度;本发明提出根据多视角图像对空间目标进行分布式三维模型重建,增加了空间目标三维重建效率和鲁棒性;对空间目标进行位姿估计的粗配准和精配准细化,提高了位子估计的准确性;本发明提出空间目标进行运动预测,可以同时估计出空间目标的姿态、角速度和全部惯性参数,具有高效、准确的优点。
技术特征:
1.一种微纳卫星群多视角空间目标感知方法,其特征在于,包括:
2.根据权利要求1所述的空间目标感知方法,其特征在于,通过微纳卫星群对空间目标进行多视角拍摄,包括:
3.根据权利要求1所述的空间目标感知方法,其特征在于,对拍摄的多视角图像进行矫正与补全,包括:
4.根据权利要求3所述的空间目标感知方法,其特征在于,根据多视角图像数据耀光程度,针对性的对多视角图像进行矫正与补全处理,包括:
5.根据权利要求1所述的空间目标感知方法,其特征在于,根据所述多视角图像对所述空间目标进行分布式三维模型重建,包括:
6.根据权利要求5所述的空间目标感知方法,其特征在于,所述单个微纳卫星完成自身局部视角的三维模型重建工作,包括:基于fpfh的点云粗配准、icp精配准、局部回环检测与优化以及tsdf表面重建。
7.根据权利要求1所述的空间目标感知方法,其特征在于,对所述空间目标进行实时位姿估计,包括:
8.根据权利要求7所述的空间目标感知方法,其特征在于,选用基于特征匹配的配准算法和基于穷举搜索的配准算法,进行位姿估计的粗配准,包括:
9.根据权利要求1所述的空间目标感知方法,其特征在于,对所述空间目标进行运动预测,包括:
10.根据权利要求1所述的空间目标感知方法,其特征在于,对所述空间目标的行为识别,包括:
技术总结
本发明公开了一种微纳卫星群多视角空间目标感知方法,包括:通过微纳卫星群对空间目标进行多视角拍摄;对拍摄的多视角图像进行矫正与补全;根据多视角图像对空间目标进行分布式三维模型重建;对空间目标进行实时位姿估计;对空间目标进行运动预测;对空间目标的行为识别。本发明提出的微纳卫星群多视角空间目标感知方法,由多颗微纳卫星携带轻小低功耗敏感器,对空间目标实施多模式协同观测,通过多源观测信息的协同融合处理,可以满足6星协同的下的目标精细化感知,三维重建精度优于85%,位姿估计精度优于10cm@20m和1°@20m,运动与行为判别准确率优于70%,实现更准确、更可靠、更快速、更灵活的感知测量与相对运动估计,实现对空间目标的感知。
技术研发人员:牟金震,朱文山,韩飞,王兆龙,宋婷,刘圣洋
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!