一种基于驾驶员响应时间的混合交通流仿真方法与流程
本申请实施例涉及交通流微观仿真,尤其涉及一种基于驾驶员响应时间的混合交通流仿真方法。
背景技术:
1、基于各种仿真模型和交通数据的交通流模拟,能够基于一定的边界条件实现一段时间内的交通演变,在道路规划、自动驾驶和安全管控等方面发挥着重要作用。
2、现有技术中,针对机动车的交通流模拟非常普遍。但针对存在非机动车的行驶场景,其交通流模拟却非常稀少,限制了道路规划、智能交通等技术的发展。
技术实现思路
1、本申请实施例提供一种基于驾驶员响应时间的混合交通流仿真仿真方法,实现非机动车混合交通流的精准模拟。
2、第一方面,本申请实施例提供了一种基于驾驶员响应时间的混合交通流仿真仿真方法,包括:
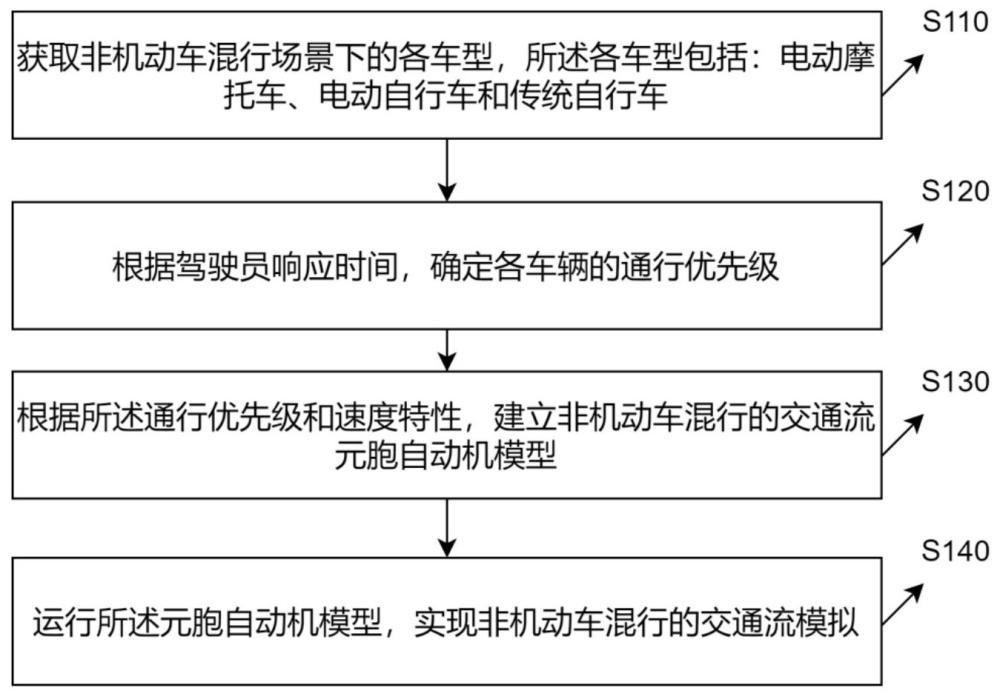
3、获取非机动车混行场景下的各车型,所述各车型包括:电动摩托车、电动自行车和传统自行车;
4、根据驾驶员响应时间,确定各车辆的通行优先级;
5、根据所述通行优先级和速度特性,建立非机动车混行的交通流元胞自动机模型;
6、运行所述元胞自动机模型,实现非机动车混行的交通流模拟。
7、第二方面,本申请实施例还提供了一种电子设备,所述电子设备包括:
8、一个或多个处理器;
9、存储器,用于存储一个或多个程序,
10、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现任一实施例所述的基于驾驶员响应时间的混合交通流仿真方法。
11、第三方面,本申请实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现任一实施例所述的基于驾驶员响应时间的混合交通流仿真方法。
12、本申请实施例根据驾驶员响应时间,分析了不同车型下响应时间对通行优先级的影响规律,并构建了匹配的通行规则与推演控制方程,使非机动车混行元胞机模型更加符合实际行驶规律,能够更加准确的模拟各类车型混合行驶场景下的交通流变化,提高模拟演化的精确性。
技术特征:
1.一种基于驾驶员响应时间的混合交通流仿真方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据驾驶员响应时间,确定各车辆的通行优先级,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述通行优先级和速度特性,建立非机动车混行的交通流元胞自动机模型,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述通行优先级,分别构建各阶段的控制方程,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据驾驶员响应时间,确定前方元胞的剩余空间和总空间限制,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据驾驶员响应时间,确定前方元胞的剩余空间和总空间限制,包括:
7.根据权利要求3所述的方法,其特征在于,所述运行所述元胞自动机模型,实现非机动车混行的交通流模拟,包括:在单位时间的模拟计算中,执行如下操作:
8.一种电子设备,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,该程序被处理器执行时实现权利要求1-7任一所述的基于驾驶员响应时间的混合交通流仿真方法。
技术总结
本申请实施例公开了一种基于驾驶员响应时间的混合交通流仿真方法,包括:获取非机动车混行场景下的各车型,所述各车型包括:电动摩托车、电动自行车和传统自行车;根据驾驶员响应时间,确定各车辆的通行优先级;根据所述通行优先级和速度特性,建立非机动车混行的交通流元胞自动机模型;运行所述元胞自动机模型,实现非机动车混行的交通流模拟。本申请实现非机动车混合交通流的精准模拟。
技术研发人员:晏江华,尤嘉勋,顾洪建,宋瑞升,武守喜,薛南南,王斌
受保护的技术使用者:中汽信息科技(天津)有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!