基于图像处理的读数自动识别方法、装置和电子设备与流程
本申请涉及行熟读的自动识别领域,且更为具体地,涉及一种基于图像处理的读数自动识别方法、装置和电子设备。
背景技术:
1、随着船舶运输业的发展,船舶六面水尺吃水数值的读取成为水尺计重计量准确性的最关键因素。在某些应用场景中,如船舶操控和监测系统,对船舶水尺读数的实时识别和反馈是必要的。然而,现有的读数识别方法可能需要较长的处理时间,无法满足实时性的要求。
2、因此,期望一种基于图像处理的读数自动识别方法、装置和电子设备,基于对待识别船舶水尺的图像数据进行特征提取和分析,从而识别出待识别船舶水尺的读数。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种基于图像处理的读数自动识别方法、装置和电子设备,其首先获取不同角度下的待识别船舶水尺的原始图像,接着,对所述原始图像进行降噪和排列等预处理操作,然后通过包含具有不同空洞率的空洞卷积核的卷积神经网络模型对所述原始图像进行不同尺度的特征提取和分析,最后通过解码器对从所述原始图像中提取到的特征信息进行特征分类以得到用于表示待识别船舶水尺读数的解码值。这样,对所述原始图像进行多尺度的特性信息的分析和识别,能够更加准确地读取出待识别船舶水尺的读数,进而有助于对船舶的操控。
2、根据本申请的第一方面,提供了一种基于图像处理的读数自动识别方法,其包括:
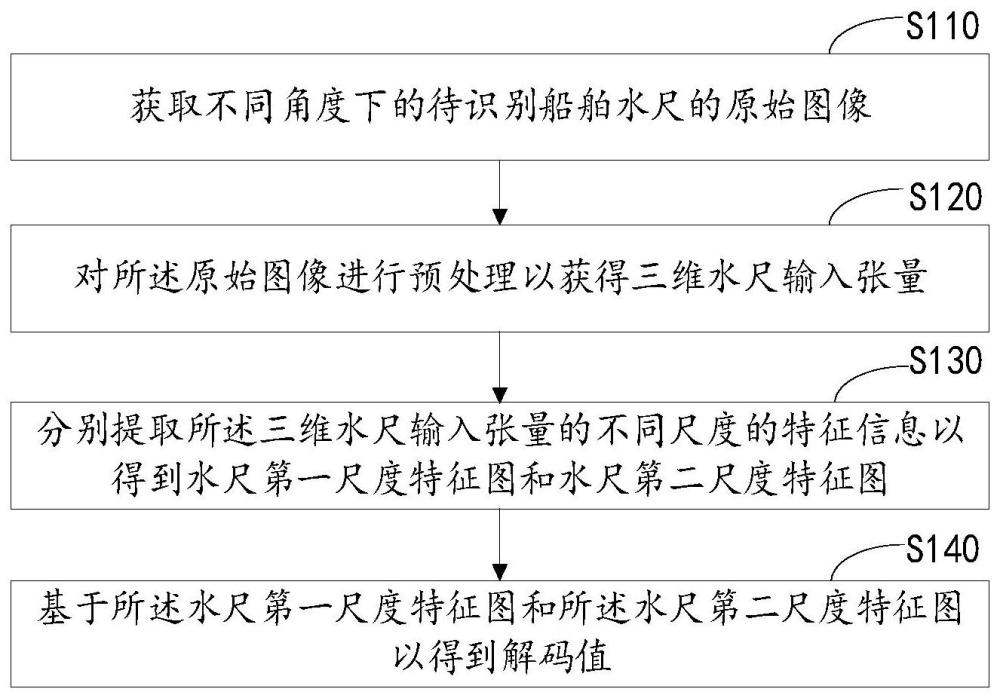
3、获取不同角度下的待识别船舶水尺的原始图像;
4、对所述原始图像进行预处理以获得三维水尺输入张量;
5、分别提取所述三维水尺输入张量的不同尺度的特征信息以得到水尺第一尺度特征图和水尺第二尺度特征图;
6、基于所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到解码值。
7、根据本申请的第二方面,提供了一种基于图像处理的读数自动识别装置,其包括:
8、图像采集模块,用于获取不同角度下的待识别船舶水尺的原始图像;
9、图像预处理模块,用于对所述原始图像进行预处理以获得三维水尺输入张量;
10、水尺特征提取模块,用于分别提取所述三维水尺输入张量的不同尺度的特征信息以得到水尺第一尺度特征图和水尺第二尺度特征图;
11、水尺解码模块,用于基于所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到解码值。
12、根据本申请的第三方面,提供了一种电子设备,包括:处理器;以及,存储器,在所述存储器中存储有计算机程序指令,所述计算机程序指令在被所述处理器运行时使得所述处理器执行如上述所述的基于图像处理的读数自动识别方法。
13、根据本申请的第四方面,提供了一种计算机可读介质,其上存储有计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行如上所述的基于图像处理的读数自动识别方法。
14、结合本申请的第一方面,在本申请的第一方面的一种基于图像处理的读数自动识别方法中,分别提取所述三维水尺输入张量的不同尺度的特征信息以得到水尺第一尺度特征图和水尺第二尺度特征图,包括:使用降噪器对所述原始图像进行降噪处理以得到多个降噪后水尺图像;将所述多个降噪后水尺图像排列为所述三维水尺输入张量。其中,所述降噪器是基于自动编码器的降噪器。
15、结合本申请的第一方面,在本申请的第一方面的一种基于图像处理的读数自动识别方法中,基于所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到解码值,包括:融合所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到多尺度水尺解码特征图;将所述多尺度水尺解码特征图通过解码器以读取出待识别船舶水尺的读数。其中,融合所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到多尺度水尺解码特征图,包括:计算所述水尺第一尺度特征图相对于所述水尺第二尺度特征图的平滑参数化表达因数;以所述平滑参数化表达因数作为权重来计算所述水尺第一尺度特征图和所述水尺第二尺度特征图的按位置加权和以得到所述多尺度水尺解码特征图。特别地,计算所述水尺第一尺度特征图相对于所述水尺第二尺度特征图的平滑参数化表达因数,用于:以如下公式计算所述水尺第一尺度特征图相对于所述水尺第二尺度特征图的平滑参数化表达因数;其中,所述公式为:
16、
17、其中,f1表示所述水尺第一尺度特征图,f2表示所述水尺第二尺度特征图,d(f1,f2)表示所述水尺第一尺度特征图和所述水尺第二尺度特征图之间的欧氏距离,cos(f1,f2)表示水尺第一尺度特征图和水尺第二尺度特征图之间的余弦相似性,α和β表示预定超参数,w表示所述平滑参数化表达因数。
18、其中,所述水尺第一尺度特征图和所述水尺第二尺度特征图之间的余弦相似性表示为:
19、
20、其中,表示所述水尺第一尺度特征图的第(k,l,m)位置的特征值,表示所述水尺第二尺度特征图的第(k,l,m)位置的特征值,w、h、c分别表示特征图的宽、高和通道数,cos(f1,f2)表示水尺第一尺度特征图和水尺第二尺度特征图之间的余弦相似性;
21、其中,欧式距离表示为:
22、
23、其中,表示所述水尺第一尺度特征图的第(k,l,m)位置的特征值,表示所述水尺第二尺度特征图的第(k,l,m)位置的特征值,w、h、c分别表示特征图的宽、高和通道数,d(f1,f2)表示所述水尺第一尺度特征图和所述水尺第二尺度特征图之间的欧氏距离。
24、结合本申请的第二方面,在本申请的第二方面的一种基于图像处理的读数自动识别装置中,所述水尺特征提取模块,包括:将所述三维水尺输入张量通过第一水尺特征提取器以得到所述水尺第一尺度特征图;将所述三维水尺输入张量通过第二水尺特征提取器以得到所述水尺第二尺度特征图。其中,所述第一水尺特征提取器和所述第二水尺特征提取器均是基于包含空洞卷积核的卷积神经网络模型的水尺特征提取器。所述第一水尺特征提取器和所述第二水尺特征提取器具有不同的空洞率。
25、与现有技术相比,本申请提供的一种基于图像处理的读数自动识别方法、装置和电子设备,其首先获取不同角度下的待识别船舶水尺的原始图像,接着,对所述原始图像进行降噪和排列等预处理操作,然后通过包含具有不同空洞率的空洞卷积核的卷积神经网络模型对所述原始图像进行不同尺度的特征提取和分析,最后通过解码器对从所述原始图像中提取到的特征信息进行特征分类以得到用于表示待识别船舶水尺读数的解码值。这样,对所述原始图像进行多尺度的特性信息的分析和识别,能够更加准确地读取出待识别船舶水尺的读数,进而有助于对船舶的操控。
技术特征:
1.一种基于图像处理的读数自动识别方法,其特征在于,包括:
2.根据权利要求1所述的基于图像处理的读数自动识别方法,其特征在于,对所述原始图像进行预处理以获得三维水尺输入张量,包括:
3.根据权利要求2所述的基于图像处理的读数自动识别方法,其特征在于,所述降噪器是基于自动编码器的降噪器。
4.根据权利要求3所述的基于图像处理的读数自动识别方法,其特征在于,分别提取所述三维水尺输入张量的不同尺度的特征信息以得到水尺第一尺度特征图和水尺第二尺度特征图,包括:
5.根据权利要求4所述的基于图像处理的读数自动识别方法,其特征在于,所述第一水尺特征提取器和所述第二水尺特征提取器具有不同的空洞率。
6.根据权利要求5所述的基于图像处理的读数自动识别方法,其特征在于,基于所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到解码值,包括:
7.根据权利要求6所述的基于图像处理的读数自动识别方法,其特征在于,融合所述水尺第一尺度特征图和所述水尺第二尺度特征图以得到多尺度水尺解码特征图,包括:
8.根据权利要求7所述的基于图像处理的读数自动识别方法,其特征在于,计算所述水尺第一尺度特征图相对于所述水尺第二尺度特征图的平滑参数化表达因数,用于:以如下公式计算所述水尺第一尺度特征图相对于所述水尺第二尺度特征图的平滑参数化表达因数;其中,所述公式为:
9.一种基于图像处理的读数自动识别装置,其特征在于,包括:
10.一种电子设备,包括:
技术总结
本申请涉及熟读的自动识别领域,其具体地公开了一种基于图像处理的读数自动识别方法、装置和电子设备,其首先获取不同角度下的待识别船舶水尺的原始图像,接着,对所述原始图像进行降噪和排列等预处理操作,然后通过包含具有不同空洞率的空洞卷积核的卷积神经网络模型对所述原始图像进行不同尺度的特征提取和分析,最后通过解码器对从所述原始图像中提取到的特征信息进行特征分类以得到用于表示待识别船舶水尺读数的解码值。这样,对所述原始图像进行多尺度的特性信息的分析和识别,能够更加准确地读取出待识别船舶水尺的读数,进而有助于对船舶的操控。
技术研发人员:陈银春
受保护的技术使用者:邯郸市烙晓网络科技有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!