标识牌检测方法、装置以及车辆与流程
本申请涉及汽车,更具体地,涉及一种标识牌检测方法、装置以及车辆。
背景技术:
1、随着科学技术的发展以及人们物质生活水平的提高,人们对车辆的使用越来越普遍,车辆的功能也越来越多。相关技术中,交通标识牌检测属于自动驾驶中重要的技术环节,人们对标识牌检测的准确性要求越来越高。
技术实现思路
1、本申请提出了一种标识牌检测方法、装置以及车辆,以改善上述问题。
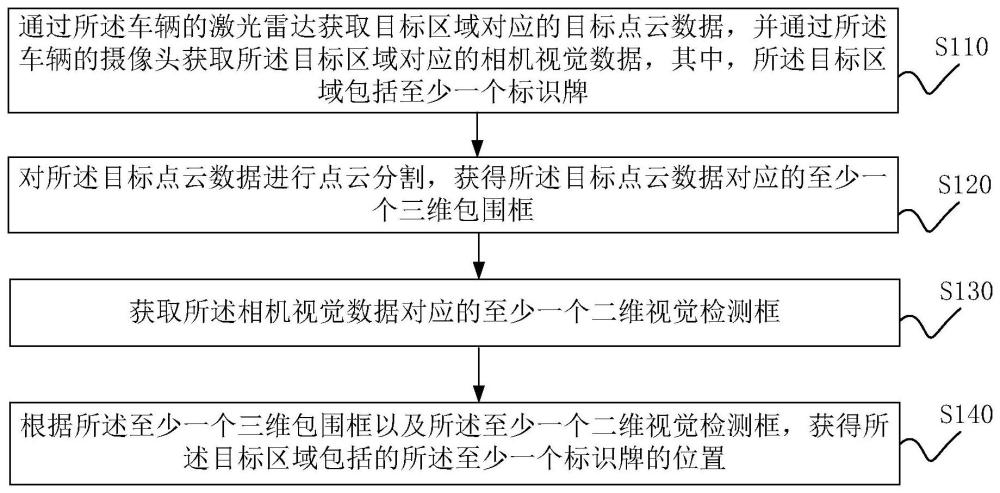
2、第一方面,本申请实施例提供了一种标识牌检测方法,应用于车辆,该方法包括:通过所述车辆的激光雷达获取目标区域对应的目标点云数据,并通过所述车辆的摄像头获取所述目标区域对应的相机视觉数据,其中,所述目标区域包括至少一个标识牌;对所述目标点云数据进行点云分割,获得所述目标点云数据对应的至少一个三维包围框;获取所述相机视觉数据对应的至少一个二维视觉检测框;根据所述至少一个三维包围框以及所述至少一个二维视觉检测框,获得所述目标区域包括的所述至少一个标识牌的位置。
3、第二方面,本申请实施例还提供了一种标识牌检测装置,应用于车辆,该装置包括:目标点云数据获取模块、三维包围框获得模块、二维视觉检测框获取模块以及标识牌位置获得模块。其中,目标点云数据获取模块,用于通过所述车辆的激光雷达获取目标区域对应的目标点云数据,并通过所述车辆的摄像头获取所述目标区域对应的相机视觉数据,其中,所述目标区域包括至少一个标识牌;三维包围框获得模块,用于对所述目标点云数据进行点云分割,获得所述目标点云数据对应的至少一个三维包围框;二维视觉检测框获取模块,用于获取所述相机视觉数据对应的至少一个二维视觉检测框;标识牌位置获得模块,用于根据所述至少一个三维包围框以及所述至少一个二维视觉检测框,获得所述目标区域包括的所述至少一个标识牌的位置。
4、第三方面,本申请实施例还提供了一种车辆,包括:一个或多个处理器、存储器以及一个或多个应用程序。其中,一个或多个应用程序被存储在存储器中并被配置为由一个或多个处理器执行,一个或多个程序配置执行以实现如上述第一方面所述的方法。
5、第四方面,本申请实施例还提供了一种计算机可读取存储介质,计算机可读取存储介质中存储有程序代码,程序代码可被处理器调用执行如上述第一方面所述的方法。
6、本申请提供的技术方案,通过车辆的激光雷达获取目标区域对应的目标点云数据,并通过车辆的摄像头获取目标区域对应的相机视觉数据,其中,目标区域包括至少一个标识牌;对目标点云数据进行点云分割,获得目标点云数据对应的至少一个三维包围框;获取相机视觉数据对应的至少一个二维视觉检测框;根据至少一个三维包围框以及至少一个二维视觉检测框,获得目标区域包括的至少一个标识牌的位置,从而根据通过激光雷达获得的目标区域对应的三维的点云数据以及通过摄像头获得的目标区域对应的二维的相机视觉数据,获得目标区域包括的标识牌的位置,以激光雷达与视觉联合的跨传感器的方式检测标识牌,提高了确定标识牌的位置的准确性。
技术特征:
1.一种标识牌检测方法,其特征在于,应用于车辆,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述至少一个三维包围框以及所述至少一个二维视觉检测框,获得所述目标区域包括的所述至少一个标识牌的位置,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述匹配关系获得所述目标区域包括的所述至少一个标识牌的位置,包括:
4.根据权利要求3所述的方法,其特征在于,所述从所述至少一个三维包围框中确定与所述至少一个二维视觉检测框成一对一关系的三维包围框作为第一三维包围框,包括:
5.根据权利要求2所述的方法,其特征在于,所述基于所述匹配关系获得所述目标区域包括的所述至少一个标识牌的位置,包括:
6.根据权利要求2所述的方法,其特征在于,所述基于所述匹配关系获得所述目标区域包括的所述至少一个标识牌的位置,包括:
7.根据权利要求2所述的方法,其特征在于,在所述根据所述至少一个三维包围框以及所述至少一个二维视觉检测框,获得所述目标区域包括的所述至少一个标识牌的位置之后,还包括:
8.根据权利要求2所述的方法,其特征在于,所述将所述至少一个三维包围框各自对应的二维框与所述至少一个二维视觉检测框匹配,获得所述至少一个二维视觉检测框与所述至少一个三维包围框的匹配关系,包括:
9.根据权利要求8所述的方法,其特征在于,所述基于所述交叠区域确定所述至少一个二维视觉检测框与所述至少一个三维包围框的匹配关系,包括:
10.根据权利要求1-9任一项所述的方法,其特征在于,在所述根据所述至少一个三维包围框以及所述至少一个二维视觉检测框,获得所述目标区域包括的标识牌的位置之前,还包括:
11.根据权利要求1-9任一项所述的方法,其特征在于,在所述根据所述至少一个三维包围框以及所述至少一个二维视觉检测框,获得所述目标区域包括的所述至少一个标识牌的位置之后,还包括:
12.一种标识牌检测装置,其特征在于,应用于车辆,所述装置包括:
13.一种车辆,其特征在于,包括:
14.一种计算机可读取存储介质,其特征在于,所述计算机可读取存储介质中存储有程序代码,所述程序代码可被处理器调用执行如权利要求1-11任一项所述的方法。
技术总结
本申请公开了一种标识牌检测方法、装置以及车辆,该方法包括:通过车辆的激光雷达获取目标区域对应的目标点云数据,并通过车辆的摄像头获取目标区域对应的相机视觉数据,目标区域包括至少一个标识牌;对目标点云数据进行点云分割,获得目标点云数据对应的至少一个三维包围框;获取相机视觉数据对应的至少一个二维视觉检测框;根据至少一个三维包围框及至少一个二维视觉检测框,获得目标区域包括的至少一个标识牌的位置。本申请根据通过激光雷达获得的目标区域对应的三维的点云数据以及通过摄像头获得的目标区域对应的二维的相机视觉数据,获得目标区域包括的标识牌的位置,提高了确定标识牌的位置的准确性。
技术研发人员:刘诚
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!