一种基于宏微观耦合变形的装配精度预测方法与流程
本申请涉及航天产品装配精度预测的,特别是一种基于宏微观耦合变形的装配精度预测方法。
背景技术:
1、随着空间机构产品不断向复杂化、高精度、性能高稳定等方向发展,产品零件结构越来越复杂,装配要求越来越高,产品性能与质量保证也越来越困难。产品性能通常来源于设计、加工与装配等环节的共同保证,主要包括产品几何精度、物理力学性能和产品服役过程中的性能稳定性等。作为最后决定产品质量的重要工艺过程,装配直接影响产品最终性能。
2、实际加工的零件表面不可避免地会与理想几何表面存在差异,准确体现零件表面的形貌特征对装配精度的影响至关重要。以空间展开机构为例,sar天线铰链处关键零件的表面形貌对零件间的接触状态有明显影响,进一步体现在复杂杆系的相对位置关系、天线面板的平面度及天线的展开性能;机械臂关节处重要零件的表面形貌对零件间的接触状态同样影响显著,进一步体现在机械臂的指向精度。
3、几何量与物理量耦合引起的装配变形已经成为机械结构装配精度难以控制的最突出原因。现有的装配精度预测与控制体系中,以“形”控“性”,即通过控制零件制造误差控制最终的装配性能,是研究热点。而物理场与通过“形”体现的几何量的耦合效应却是制约装配性能的关键因素。在产品装配过程中,由于定位夹紧等外力作用,零件表面也会产生一定的变形,而这些变形又会进一步影响零件之间的相互位置,对产品的最终装配质量产生影响。
技术实现思路
1、本发明的目的在于提供一种基于宏微观耦合变形的装配精度预测方法,实现根据几何量与物理量耦合的装配变形对机械产品装配精度影响的预测。
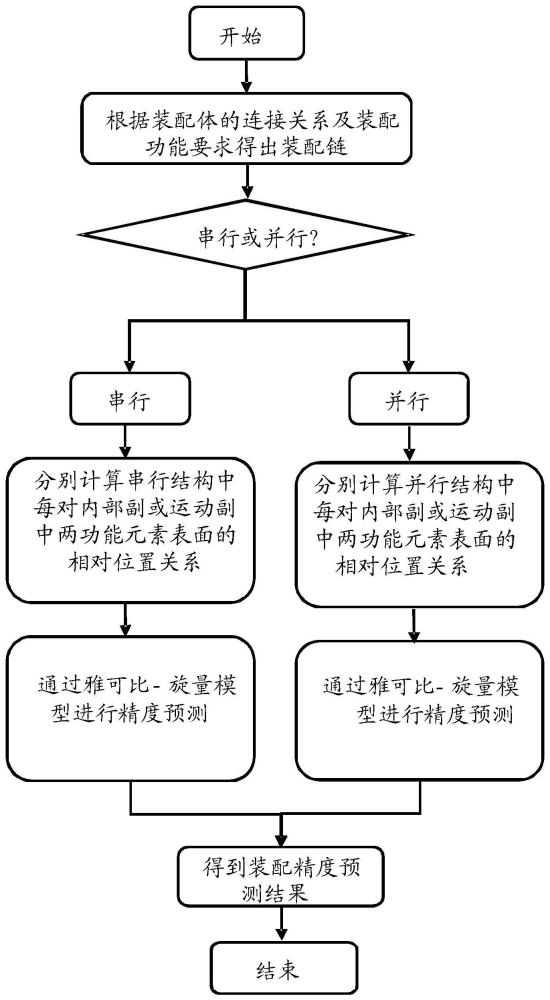
2、第一方面,提供了一种基于宏微观耦合变形的装配精度预测方法,根据装配体的连接关系及装配功能要求得出装配链;
3、分别计算装配链中每对内部副或运动副中两功能元素表面的相对位置关系;
4、根据相对位置关系,向雅可比-旋量模型中带入小位移旋量进行精度预测。
5、结合第一方面,在第一方面的某些实现方式中,所述雅可比-旋量模型表达式为:
6、
7、
8、
9、式中:
10、——第i坐标系相对于世界坐标系的方向变化;
11、v1i、v2i、v3i——轴xi、yi、zi在功能要求坐标系中的方向向量;
12、——功能要求方向与第i坐标系中3个坐标轴方向的不一致性系数;
13、v1、v2、v3——公差累积结果的3个方向在第i坐标系中的方向矢量;
14、win——第n坐标系相对第i坐标系的位置变化;
15、dxi、dxn——第i、n坐标系原点在世界坐标系下的x坐标值;
16、dyi、dyn——第i、n坐标系原点在世界坐标系下的y坐标值;
17、dzi、dzn——第i、n坐标系原点在世界坐标系下的z坐标值;
18、指示不同方向的小位移旋量。
19、结合第一方面,在第一方面的某些实现方式中,根据相对位置关系计算小位移旋量分量,包括:
20、辨别一功能元素表面上的任意一点,其在另一表面上的对应点为与之取得最小欧几里得距离的点;
21、定义目标函数和约束,对于内部副,优化问题的目标是点与对应点在装配方向上的投影距离绝对值之和的最小值,对于运动副,接触表面点对应点之间的法向距离不小于0,优化问题中添加约束条件来避免表面间点云穿透;
22、通过优化算法解算优化问题,返回小位移旋量。
23、结合第一方面,在第一方面的某些实现方式中,所述优化算法包括以下任一项:有效集法,内点法,ihlrf法,序列二次规划法。
24、结合第一方面,在第一方面的某些实现方式中,所述装配链为串行或并行装配链。
25、结合第一方面,在第一方面的某些实现方式中,所述运动副的小位移旋量考虑装配变形的影响。
26、结合第一方面,在第一方面的某些实现方式中,所述装配变形包括局部微观变形,其中,计算粗糙表面的接触问题等效为求解系统最小势能的问题,通过共轭梯度-快速傅里叶变换方法求解,对于两个无摩擦纯弹性粗糙表面受压接触问题,等效简化为刚性平面与弹塑性粗糙表面的接触问题,实现两个弹塑性表面接触问题的求解。
27、结合第一方面,在第一方面的某些实现方式中,所述装配变形还包括整体宏观变形,采用理想模型进行有限元计算得到宏观变形,采用非理想表面模型进行接触力学计算;其中,采用有限元法计算宏观变形采用影响系数法求解刚度矩阵,再通过刚度矩阵求解变形。
28、结合第一方面,在第一方面的某些实现方式中,所述运动副的小位移旋量考虑实测数据,所述方法还包括实测数据处理,包括通过多项基函数系数对实测数据拟合得到实测表面。
29、结合第一方面,在第一方面的某些实现方式中,所述实测表面应用于局部微观变形,其中,在宏观变形的基础上,把包含关键配合表面的局部结构剥离出来,并把通过实际测量得到的数据滤波重构后加入到局部结构模型中,采用弹塑性接触力学算法对局部结构进行力学分析。
30、与现有技术相比,本申请提供的方案至少包括以下有益技术效果:
31、本发明借用弹塑性接触力学中的求解算法实现微观变形计算,通过有限元方法实现宏观变形计算,并提出宏-微观变形耦合的装配变形计算方法,该方法既能保证计算的准确性,又可提高计算效率。在此基础上,提出基于改进雅可比-旋量模型的串/并行空间展开机构装配精度预测方法,揭示几何量-物理量耦合的装配变形对装配精度的影响规律。
技术特征:
1.一种基于宏微观耦合变形的装配精度预测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述雅可比-旋量模型表达式为:
3.根据权利要求1所述的方法,其特征在于,根据相对位置关系计算小位移旋量分量,包括:
4.根据权利要求1所述的方法,其特征在于,所述优化算法包括以下任一项:有效集法,内点法,ihlrf法,序列二次规划法。
5.根据权利要求1所述的方法,其特征在于,所述装配链为串行或并行装配链。
6.根据权利要求1所述的方法,其特征在于,所述运动副的小位移旋量考虑装配变形的影响。
7.根据权利要求1所述的方法,其特征在于,所述装配变形包括局部微观变形,其中,计算粗糙表面的接触问题等效为求解系统最小势能的问题,通过共轭梯度-快速傅里叶变换方法求解,对于两个无摩擦纯弹性粗糙表面受压接触问题,等效简化为刚性平面与弹塑性粗糙表面的接触问题,实现两个弹塑性表面接触问题的求解。
8.根据权利要求1所述的方法,其特征在于,所述装配变形还包括整体宏观变形,采用理想模型进行有限元计算得到宏观变形,采用非理想表面模型进行接触力学计算;其中,采用有限元法计算宏观变形采用影响系数法求解刚度矩阵,再通过刚度矩阵求解变形。
9.根据权利要求1所述的方法,其特征在于,所述运动副的小位移旋量考虑实测数据,所述方法还包括实测数据处理,包括通过多项基函数系数对实测数据拟合得到实测表面。
10.根据权利要求9所述的方法,其特征在于,所述实测表面应用于局部微观变形,其中,在宏观变形的基础上,把包含关键配合表面的局部结构剥离出来,并把通过实际测量得到的数据滤波重构后加入到局部结构模型中,采用弹塑性接触力学算法对局部结构进行力学分析。
技术总结
本发明公开了一种基于宏微观耦合变形的装配精度预测方法。本发明借用弹塑性接触力学中的求解算法实现微观变形计算,通过有限元方法实现宏观变形计算,并提出宏‑微观变形耦合的装配变形计算方法,该方法既能保证计算的准确性,又可提高计算效率。在此基础上,提出基于改进雅可比‑旋量模型的串/并行空间展开机构装配精度预测方法,揭示几何量‑物理量耦合的装配变形对装配精度的影响规律。
技术研发人员:张志强,李光,赖小明,李金宝,王青,陈钦韬,程泽,高泽,张海东,顾帅
受保护的技术使用者:北京卫星制造厂有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!