一种防止抖动的追踪数据获取方法、控制设备及介质与流程
本申请涉及汽车智能控制,尤其涉及一种防止抖动的追踪数据获取方法、控制设备及介质。
背景技术:
1、随着新能源车的发展,智能座舱逐渐取代传统座舱。基于3dof(three degree offreedom,三自由度)数据的交互为基于x、y、z三个坐标轴转动自由度的交互方式,一般使用惯性传感器检测不同方向的自由转动,由于只需要惯性传感器就可以检测三个坐标轴轴向的自由转动,并且所用设备体积小、使用条件限制少,所以基于3dof数据的交互成为一种基础交互方式,并且被应用于智能座舱中。
2、但是基于3dof数据的交互用于智能座舱后产生了新的问题,由于行车环境较为复杂,在车辆行进中不可避免的会出现车辆抖动,且随着车的抖动,会对座舱内基于3dof数据实现的智能交互场景产生影响。例如,车载屏幕或xr眼镜播放的视频画面随着车身抖动而抖动会影响用户观感,手柄控制器射线抖动会使得xr交互变的困难,如果不进行防抖,影响用户体验。
技术实现思路
1、为了克服上述缺陷,本申请提出一种防止抖动的追踪数据获取方法、控制设备及介质,旨在解决因车辆抖动对基于3dof数据的交互场景产生影响的问题。
2、在第一方面,本申请提供一种防止抖动的追踪数据获取方法,所述方法包括:
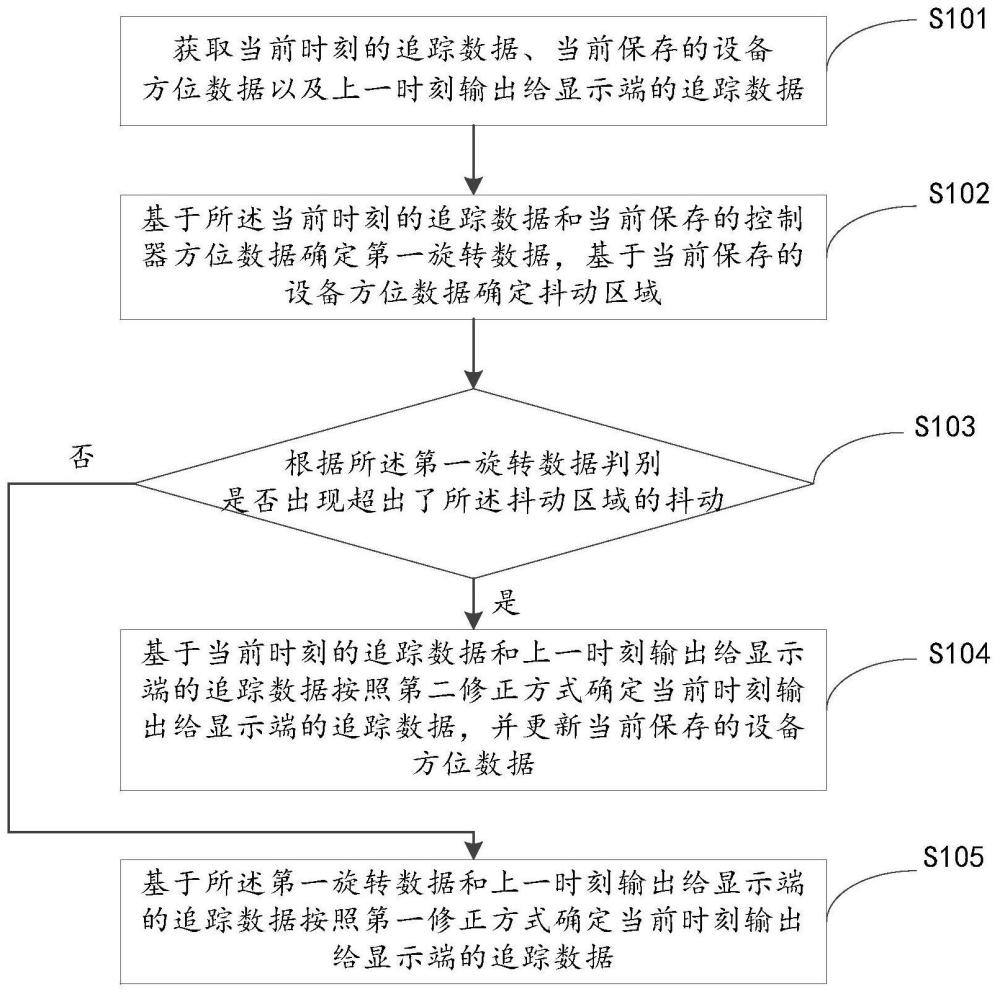
3、获取当前时刻的追踪数据、当前保存的设备方位数据以及上一时刻输出给显示端的追踪数据;
4、基于所述当前时刻的追踪数据和当前保存的设备方位数据确定第一旋转数据,基于当前保存的设备方位数据确定抖动区域;
5、根据所述第一旋转数据判别是否出现超出了所述抖动区域的抖动,是则基于当前时刻的追踪数据和上一时刻输出给显示端的追踪数据按照第二修正方式确定当前时刻输出给显示端的追踪数据,并更新当前保存的设备方位数据;否则基于所述第一旋转数据和上一时刻输出给显示端的追踪数据按照第一修正方式确定当前时刻输出给显示端的追踪数据。
6、优选地,上述基于当前时刻的追踪数据和上一时刻输出给显示端的追踪数据按照第二修正方式确定当前时刻输出给显示端的追踪数据具体为:
7、基于当前时刻的追踪数据和上一时刻输出给显示端的追踪数据确定第二旋转数据;
8、基于所述第二旋转数据获得第二修正追踪数据;
9、基于所述第二修正追踪数据和上一时刻输出给显示端的追踪数据确定当前时刻输出给显示端的追踪数据。
10、优选地,上述更新当前保存的设备方位数据具体为:用所述当前时刻的追踪数据更新当前保存的设备方位数据。
11、优选地,上述基于所述第一旋转数据和上一时刻输出给显示端的追踪数据按照第一修正方式确定当前时刻输出给显示端的追踪数据具体为:
12、基于所述第一旋转数据获得第一修正追踪数据;
13、基于所述第一修正追踪数据和上一时刻输出给显示端的追踪数据确定当前时刻输出给显示端的追踪数据。
14、优选地,上述基于当前保存的设备方位数据确定抖动区域具体为:以当前保存的设备方位数据为中心位置,以预设阈值为半径画圆所确定的区域为所述抖动区域。
15、优选地,上述当前时刻的追踪数据、当前保存的设备方位数据、上一时刻输出给显示端的追踪数据、第一旋转数据以及第二旋转数据均为三自由度四元数。
16、进一步地,所述根据所述第一旋转数据判别是否出现超出了所述抖动区域的抖动具体为:
17、将所述第一旋转数据分解为轴角式以获得轴向量和旋转角,判断所述旋转角是否大于预设阈值,是则表示出现了超出所述抖动区域的抖动,否则表示未出现超出所述抖动区域的抖动。
18、进一步地,所述当前时刻的追踪数据是基于车辆的传感器数据获得,所述预设阈值至少包括车辆处于运动状态时对应的预设阈值,以及车辆处于静止状态时对应的预设阈值。
19、进一步地,所述第一修正方式和所述第二修正方式均采用了四元数插值法进行修正;
20、所述第一修正方式采用的四元数插值法的插值系数设为第一预设值;
21、所述第二修正方式采用的四元数插值法的插值系数设为第二预设值。
22、进一步地,所述当前时刻的追踪数据是基于车辆的传感器数据获得,所述第一预设值和所述第二预设值数至少包括车辆处于运动状态时对应的第一预设值和第二预设值,以及车辆处于静止状态时对应的第一预设值和第二预设值。
23、在第二方面,本申请提供一种控制设备,该计算机设备包括处理器和存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述一种防止抖动的追踪数据获取方法的技术方案中任一项技术方案所述的方法。
24、在第三方面,本申请提供一种车辆,所述车辆包括上述控制设备。
25、在第四方面,本申请提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述一种防止抖动的追踪数据获取方法的技术方案中任一项技术方案所述的方法。
26、本申请上述一个或多个技术方案,至少具有如下一种或多种有益效果:
27、在实施本申请的技术方案中,获取当前时刻的追踪数据、当前保存的设备方位数据以及上一时刻输出给显示端的追踪数据;基于所述当前时刻的追踪数据和当前保存的设备方位数据确定第一旋转数据,基于当前保存的设备方位数据确定抖动区域;根据所述第一旋转数据判别是否出现超出了所述抖动区域的抖动,并采用不同的防抖算法对抖动进行抑制。即本申请根据当前保存的设备方位数据可以确定一个抖动区域,对于出现在该抖动区域内和抖动区域外的抖动分别采用不同的第一修正方式和第二修正方式进行处理以实现防抖的目的,进而提高用于实现本申请的追踪数据获取方法的控制设备的射线控制或画面控制的稳定性,尤其可以提高用户的xr交互体验。
技术特征:
1.一种防止抖动的追踪数据获取方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于当前时刻的追踪数据和上一时刻输出给显示端的追踪数据按照第二修正方式确定当前时刻输出给显示端的追踪数据具体为:
3.根据权利要求1所述的方法,其特征在于,所述基于当前时刻的追踪数据和上一时刻输出给显示端的追踪数据按照第二修正方式确定当前时刻输出给显示端的追踪数据具体为:
4.根据权利要求1所述的方法,其特征在于,所述更新当前保存的设备方位数据具体为:用所述当前时刻的追踪数据更新当前保存的设备方位数据。
5.根据权利要求1所述的方法,其特征在于,所述基于所述第一旋转数据和上一时刻输出给显示端的追踪数据按照第一修正方式确定当前时刻输出给显示端的追踪数据具体为:
6.根据权利要求1所述的方法,其特征在于,所述基于当前保存的设备方位数据确定抖动区域具体为:以当前保存的设备方位数据为中心位置,以预设阈值为半径画圆所确定的区域为所述抖动区域。
7.根据权利要求2或3所述的方法,其特征在于,所述当前时刻的追踪数据、当前保存的设备方位数据、上一时刻输出给显示端的追踪数据、第一旋转数据以及第二旋转数据均为三自由度四元数。
8.根据权利要求7所述的方法,其特征在于,所述根据所述第一旋转数据判别是否出现超出了所述抖动区域的抖动具体为:
9.根据权利要求8所述的方法,其特征在于:所述当前时刻的追踪数据是基于车辆的传感器数据获得;
10.根据权利要求7所述的方法,其特征在于,所述第一修正方式和所述第二修正方式均采用了四元数插值法进行修正;
技术总结
本申请公开一种防止抖动的追踪数据获取方法、控制设备及介质,涉及汽车智能控制技术领域。该方法包括获取当前时刻的追踪数据、当前保存的设备方位数据以及上一时刻输出给显示端的追踪数据;基于当前时刻的追踪数据和当前保存的设备方位数据确定第一旋转数据,基于当前保存的设备方位数据确定抖动区域;根据所述第一旋转数据判别是否出现超出了所述抖动区域的抖动,对于出现在该抖动区域内和外的抖动分别采用不同的第一修正方式和第二修正方式进行处理以实现防抖的目的,进而提高控制设备的射线控制或画面控制的稳定性,提高用户的交互体验。
技术研发人员:曹仲晴,刘潇,袁安贝
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!