一种摄像头异常状态检测方法与流程
:本发明涉及一种摄像头异常状态检测方法。
背景技术
0、
背景技术:
1、煤矿是指人类在富含煤炭的矿区开采煤炭资源的区域,一般分为井工煤矿和露天煤矿;当煤层离地表远时,一般选择向地下开掘巷道采掘煤炭,此为井工煤矿,当煤层距地表的距离很近时,一般选择直接剥离地表土层挖掘煤炭,此为露天煤矿,我国绝大部分煤矿属于井工煤矿。
2、在煤炭生产过程中,可以通过摄像头来实时监测多个场景任务,如给煤机是否卡堵、皮带是否跑偏等;通过将人工智能算法部署到摄像头上,可以及时发现问题进行报警,从而提高生产效率,减少经济损失。
3、然而摄像头经常出现异常情况,如摄像头模糊、遮挡或者离线等,这都会引起算法出现检测错误的现象,造成错误报警,进而带来经济损失;在当前煤炭实际生产过程中,煤矿工作人员大多采取人工巡检的方法查看摄像头状态,通过人眼查看摄像头是否出现异常,这不仅浪费人力,而且还耗费时间,也不能准确地判断出哪个摄像头出现异常,增加了人力成本,还可能由于人为主观因素造成问题发现不及时、判断错误的情况。
技术实现思路
0、
技术实现要素:
1、本发明实施例提供了一种摄像头异常状态检测方法,方法设计合理,基于视觉分析处理技术和机器学习技术,对实时视频流进行分析,不仅减少了人工巡检和人力成本、加快了检测速度,还提高了检测的可靠性;同时对产生异常的摄像头进行异常状态精准定位,准确获取对应摄像头所在的位置,方便工作人员快速准确发现问题,可根据摄像头异常的具体原因进行现场生产管理,降低后续摄像头发生异常的概率,能够对多个摄像头进行同步检测,提高了整体检测效率,适用于多种不同的煤矿生产应用场景,解决了现有技术中存在的问题。
2、本发明为解决上述技术问题所采用的技术方案是:
3、一种摄像头异常状态检测方法,所述检测方法包括以下步骤:
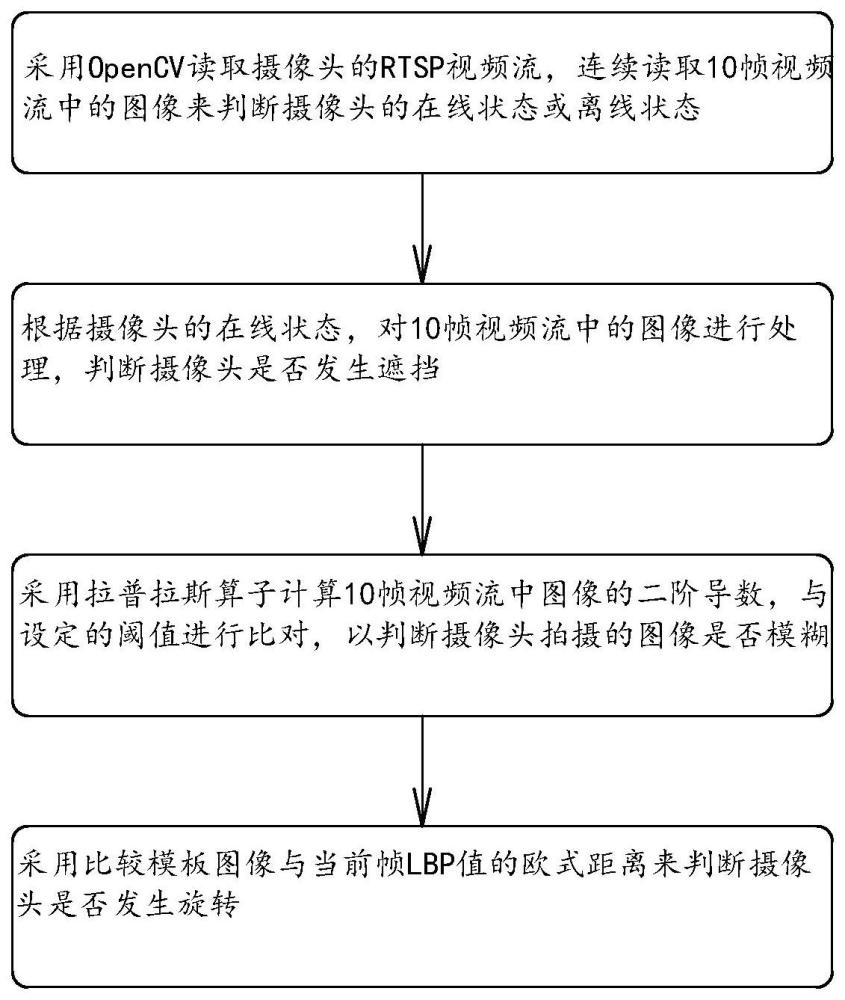
4、s1,采用opencv读取摄像头的rtsp视频流,连续读取10帧视频流中的图像来判断摄像头的在线状态或离线状态;当在10帧视频流中读取到图像时,说明摄像头处于在线状态,开始检测摄像头的异常状况;当在10帧视频流中未读取到图像时,说明摄像头处于离线状态,开始检测下一个摄像头;
5、s2,根据摄像头的在线状态,对10帧视频流中的图像进行处理,判断摄像头是否发生遮挡;
6、s3,采用拉普拉斯算子计算10帧视频流中图像的二阶导数,与设定的阈值进行比对,以判断摄像头拍摄的图像是否模糊;
7、s4,采用比较模板图像与当前帧lbp值的欧式距离来判断摄像头是否发生旋转。
8、根据摄像头的在线状态,对10帧视频流中的图像进行处理,判断摄像头是否发生遮挡包括以下步骤:
9、s2.1,采用去雾公式对10帧视频流中的图像进行去雾操作,以避免雾霾效果对计算图像连通域造成影响;
10、s2.2,将10帧视频流中的图像转换成灰度图,以加快图像处理速度,减少存储空间,提高计算效率;
11、s2.3,采用中值滤波将像素的值替换为邻域内像素值的中值;
12、s2.4,采用sobe l算子进行轮廓检测,提取出图像中每个物体的轮廓;
13、s2.5,将图像的像素范围设置在[0:255],进行阈值分析;
14、s2.6,对阈值分析后的图像进行反操作,获取图像的连通域,将最大的连通域面积除以整幅图像的面积,如果大于设定的阈值,则认为摄像头出现遮挡,如果小于设定的阈值,则认为摄像头未出现遮挡。
15、所述去雾公式为:
16、img=ori_img*t(x)+a*(1-t(x))
17、其中,or i_img为原始图像;t(x)是透射率,用于表示图像中每个像素点的雾浓度参数,通过计算图像的暗通道估计得到;a是全局大气光值,表示整个图像的全局光照强度。
18、所述sobe l算子包括水平方向的算子和垂直方向的算子,具体为:
19、
20、采用拉普拉斯算子计算10帧视频流中图像的二阶导数,与设定的阈值进行比对,以判断摄像头拍摄的图像是否模糊包括以下步骤:
21、s3.1,将原始图像转换为灰度图,加快图像处理速度,提高计算效率和鲁棒性;
22、s3.2,对转换的灰度图通过拉普拉斯算子计算图像的二阶导数,所述拉普拉斯算子为:
23、
24、其中,表示图像f的拉普拉斯算子。
25、采用比较模板图像与当前帧lbp值的欧式距离来判断摄像头是否发生旋转包括以下步骤:
26、s4.1,进行亮度比较,判断模板图像和当前图像亮度是否满足设定的阈值,以及比较图像和当前帧是否出现明显亮度变化;
27、s4.2,将原始图像进行灰度化处理;
28、s4.3,采用旋转不变一致性模式通过提取公式提取图像的lbp特征;
29、s4.4,计算模板图像和当前帧lbp特征的欧式距离,若大于设定阈值,则认为摄像头发生旋转,所述欧式距离的计算公式为:
30、
31、其中,x,y分别表示模板图像和当前帧的lbp特征,xi,yi分别表示模板图像和当前帧的lbp特征中的第i个元素。
32、所述提取公式为:
33、
34、其中,ror(x|i)表示由x表示的p位二进制数执行循环按位右移i次。
35、所述检测方法的硬件设备包括:摄像头、硬盘录像机和边缘分析设备;所述摄像头为本安型摄像头,所述边缘分析设备为具有ai芯片的推理服务器或边缘分析盒子;
36、所述边缘分析设备读取硬盘录像机中的视频流进行分析,返回分析结果,发出报警信息,并同时发送到应用系统和用户手机端进行提醒。
37、本发明采用上述方法,通过opencv读取摄像头的rtsp视频流,连续读取10帧视频流中的图像来判断摄像头的在线状态或离线状态;通过对10帧视频流中的图像进行处理,判断摄像头是否发生遮挡;通过拉普拉斯算子计算10帧视频流中图像的二阶导数,与设定的阈值进行比对,以判断摄像头拍摄的图像是否模糊;通过比较模板图像与当前帧lbp值的欧式距离来判断摄像头是否发生旋转,具有简便实用、精准高效的优点。
技术特征:
1.一种摄像头异常状态检测方法,其特征在于,所述检测方法包括以下步骤:
2.根据权利要求1所述的一种摄像头异常状态检测方法,其特征在于,根据摄像头的在线状态,对10帧视频流中的图像进行处理,判断摄像头是否发生遮挡包括以下步骤:
3.根据权利要求2所述的一种摄像头异常状态检测方法,其特征在于,所述去雾公式为:
4.根据权利要求2所述的一种摄像头异常状态检测方法,其特征在于,所述sobel算子包括水平方向的算子和垂直方向的算子,具体为:
5.根据权利要求2所述的一种摄像头异常状态检测方法,其特征在于,采用拉普拉斯算子计算10帧视频流中图像的二阶导数,与设定的阈值进行比对,以判断摄像头拍摄的图像是否模糊包括以下步骤:
6.根据权利要求2所述的一种摄像头异常状态检测方法,其特征在于,采用比较模板图像与当前帧lbp值的欧式距离来判断摄像头是否发生旋转包括以下步骤:
7.根据权利要求6所述的一种摄像头异常状态检测方法,其特征在于,所述提取公式为:
8.根据权利要求1所述的一种摄像头异常状态检测方法,其特征在于,所述检测方法的硬件设备包括:摄像头、硬盘录像机和边缘分析设备;所述摄像头为本安型摄像头,所述边缘分析设备为具有ai芯片的推理服务器或边缘分析盒子;
技术总结
一种摄像头异常状态检测方法,所述检测方法包括以下步骤:S1,采用OpenCV读取摄像头的RTSP视频流,连续读取10帧视频流中的图像来判断摄像头的在线状态或离线状态;当在10帧视频流中读取到图像时,说明摄像头处于在线状态,开始检测摄像头的异常状况;当在10帧视频流中未读取到图像时,说明摄像头处于离线状态,开始检测下一个摄像头;S2,根据摄像头的在线状态,对10帧视频流中的图像进行处理,判断摄像头是否发生遮挡;S3,采用拉普拉斯算子计算10帧视频流中图像的二阶导数,与设定的阈值进行比对,以判断摄像头拍摄的图像是否模糊;S4,采用比较模板图像与当前帧LBP值的欧式距离来判断摄像头是否发生旋转。
技术研发人员:李金弟,王卜堂,赵金娥,田兆燕,高桢,任尚静
受保护的技术使用者:云鼎科技股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!