随臂式相机采集点的确定方法及装置与流程
本申请涉及随臂式相机采集点的确定领域,尤其涉及一种随臂式相机采集点的确定方法及装置。
背景技术:
1、工业生产过程中,工件不可避免会因为生产工艺的限制,而偶发性的产生各种表面缺陷,现在已经逐渐有了通过机械臂携带2d工业相机采集工件表面图像搭配ai检测提供人工肉眼检测的解决方案,该方案检测效果稳定,且效率更高。针对每个工件,都需要规划独特的机械臂点位序列,实际工作中机械臂会按照该点位序列依序走位,每个点位都是进行2d采集和ai识别。但目前ai识别对与图像效果要求很高,如果采集角度不合适,那检测的漏检率和过检率都会受到很大影响。而目前对工件规划机械臂点位序列的过程(即示教)一般均为人工完成,人工操作时容易导致选取的采集角度针对当前采集区域不合适,存在夹角过大导致采集的图像不合适的情况。如图1所示的点表示出现缺陷的位置,图1中左侧拍摄角度过大,采集的图像效果肯定不佳,图1中右侧采集角度比较合适。
2、针对相关技术中的上述问题,目前尚未存在有效的解决方案。
技术实现思路
1、本申请提供了一种随臂式相机采集点的确定方法及装置,以解决现有技术中是由于采集角度过大导致采集的图像质量较低的问题。
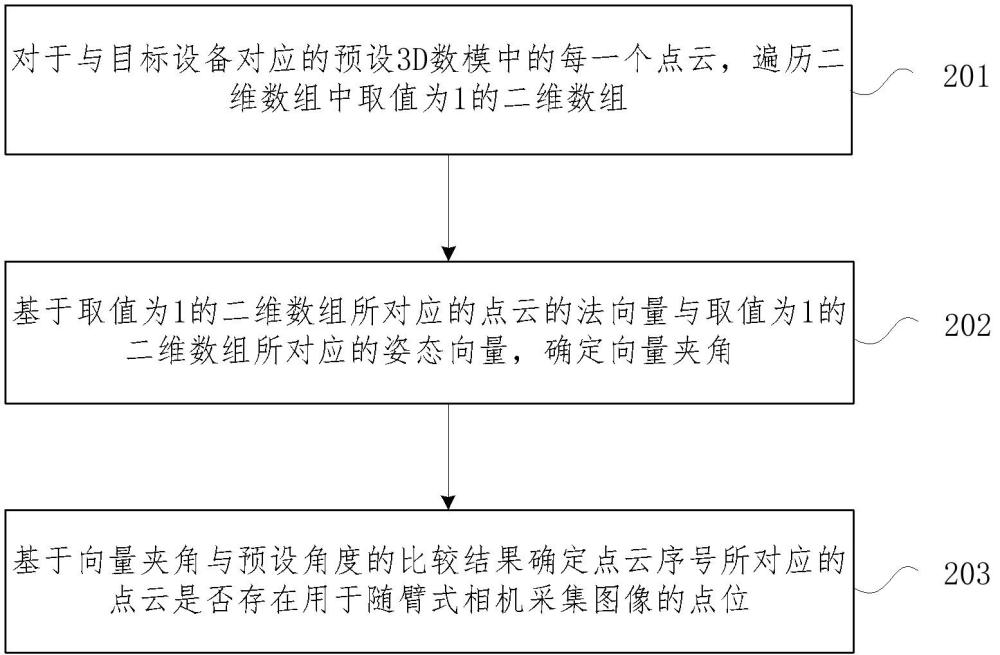
2、第一方面,本申请提供了一种随臂式相机采集点的确定方法,包括:对于与目标设备对应的预设3d数模中的每一个点云,遍历二维数组中取值为1的二维数组;其中,所述二维数组中的第一维为所述3d数模中的点云序号,所述二维数组中的第二维为点位序列;所述二维数组的取值为1表征在与所述点云序号对应的点位由所述随臂式相机采集到二维图像;基于取值为1的二维数组所对应的点云的法向量与所述取值为1的二维数组所对应的姿态向量,确定向量夹角;其中,所述姿态向量为所述随臂式相机在所述点位时,通过内参标定得到的主点坐标与相机光心原点形成的向量在机械臂坐标系下的向量;基于所述向量夹角与预设角度的比较结果确定所述点云序号所对应的点云是否存在用于所述随臂式相机采集图像的点位。
3、第二方面,本申请提供了一种随臂式相机采集点的确定装置,包括:第一处理模块,用于对于与目标设备对应的预设3d数模中的每一个点云,遍历二维数组中取值为1的二维数组;其中,所述二维数组中的第一维为所述3d数模中的点云序号,所述二维数组中的第二维为点位序列;所述二维数组的取值为1表征在与所述点云序号对应的点位由所述随臂式相机采集到二维图像;第二处理模块,用于基于取值为1的二维数组所对应的点云的法向量与所述取值为1的二维数组所对应的姿态向量,确定向量夹角;其中,所述姿态向量为所述随臂式相机在所述点位时,通过内参标定得到的主点坐标与相机光心原点形成的向量在机械臂坐标系下的向量;第一确定模块,用于基于所述向量夹角与预设角度的比较结果确定所述点云序号所对应的点云是否存在用于所述随臂式相机采集图像的点位。
4、第三方面,本申请提供了一种电子设备,包括:至少一个通信接口;与所述至少一个通信接口相连接的至少一个总线;与所述至少一个总线相连接的至少一个处理器;与所述至少一个总线相连接的至少一个存储器,其中,所述处理器被配置为执行本申请上述第一方面所述的随臂式相机采集点的确定方法。
5、第四方面,本申请还提供了一种计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行本申请上述第一方面所述的随臂式相机采集点的确定方法。
6、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请实施例提供的该方法,通过遍历二维数组中取值为1的二维数组,进而确定该二维数组取值为1的对应的点云的法向量与取值为1的二维数组所对应的姿态向量之间的夹角与预设角度的比较结果,确定点云序号所对应的点云是否存在用于随臂式相机采集图像的点位,进而可以获取夹角较小的点位进行图像采集,提升了采集图像的质量,避免了现有技术中虽然可以采集到的对应的图像但是由于采集角度过大导致采集的图像质量较低的问题。
技术特征:
1.一种随臂式相机采集点的确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,对于与目标设备对应的预设3d数模中的每一个点云,遍历二维数组中取值为1的二维数组包括:
3.根据权利要求1所述的方法,其特征在于,在遍历二维数组中取值为1的二维数组之前,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,基于取值为1的二维数组所对应的点云的法向量与所述取值为1的二维数组所对应的姿态向量,确定向量夹角包括:
5.根据权利要求4所述的方法,其特征在于,基于所述向量夹角与预设角度的比较结果确定所述点云序号所对应的点云是否为所述随臂式相机的采集点,包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.一种随臂式相机采集点的确定装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,第一处理模块包括:
9. 一种电子设备,包括:至少一个通信接口;与所述至少一个通信接口相连接的至少一个总线;与所述至少一个总线相连接的至少一个处理器;与所述至少一个总线相连接的至少一个存储器,其中, 所述处理器被配置为执行本申请上述权利要求1至6任一项所述的随臂式相机采集点的确定方法。
10.一种计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行本申请上述权利要求1至6任一项所述的随臂式相机采集点的确定方法。
技术总结
本申请涉及一种随臂式相机采集点的确定方法及装置,其中,该方法包括:对于与目标设备对应的预设3D数模中的每一个点云,遍历二维数组中取值为1的二维数组;基于取值为1的二维数组所对应的点云的法向量与取值为1的二维数组所对应的姿态向量,确定向量夹角;其中,姿态向量为随臂式相机在点位时,通过内参标定得到的主点坐标与相机光心原点形成的向量在机械臂坐标系下的向量;基于向量夹角与预设角度的比较结果确定点云序号所对应的点云是否存在用于随臂式相机采集图像的点位。通过本申请,解决了现有技术中是由于采集角度过大导致采集的图像质量较低的问题。
技术研发人员:胡亘谦,于洋,赵佳南
受保护的技术使用者:深圳市信润富联数字科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!