一种眼球自转角度的确定方法、装置、设备及存储介质与流程
本公开实施例涉及眼球识别,具体涉及一种眼球自转角度的确定方法、装置、设备及存储介质。
背景技术:
1、随着虚拟现实(virtual reality,vr)技术的发展,vr设备中会配备眼球识别的系统用来获取眼球的特征,从而进一步地实现虹膜的识别、瞳距的调节、眼睛朝向的估计等基于眼球模型的相关功能。
2、目前,在估计视线时,现有技术只计算眼球的旋转角度,没有考虑眼球的自转角度,导致估计的视线不准确,存在偏差。因此,亟需提供一种眼球自转角度的确定方法,以便利用眼球的旋转角度和自转角度估计视线,提升视线估计的准确性。
技术实现思路
1、本公开的至少一个实施例提供了一种眼球自转角度的确定方法、装置、设备及存储介质。
2、第一方面,本公开实施例提出一种眼球自转角度的确定方法,该方法包括:
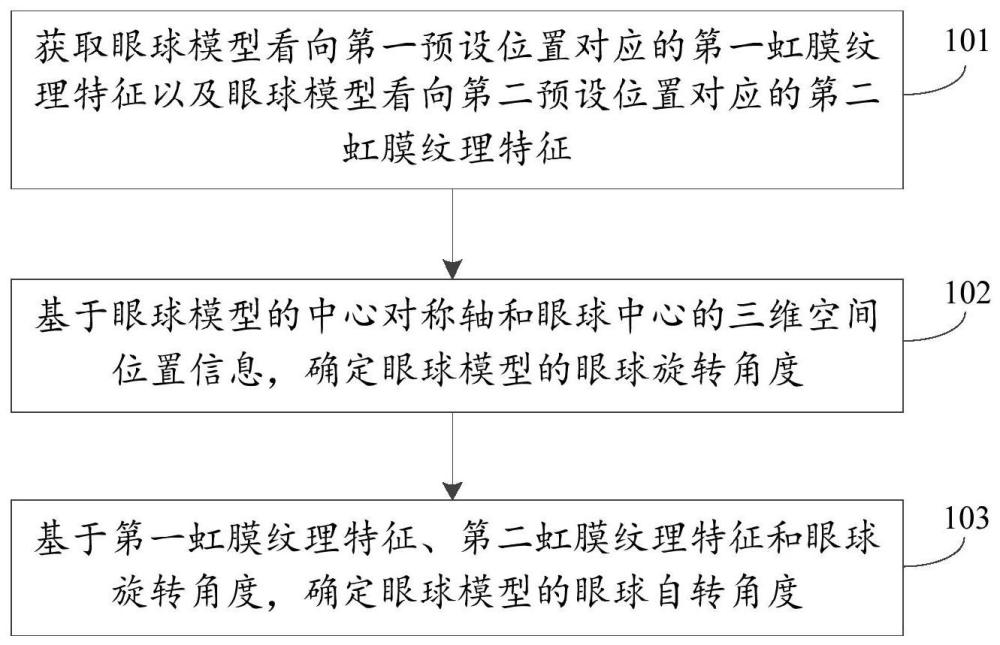
3、获取眼球模型看向第一预设位置对应的第一虹膜纹理特征以及眼球模型看向第二预设位置对应的第二虹膜纹理特征;
4、基于眼球模型的中心对称轴和眼球中心的三维空间位置信息,确定眼球模型的眼球旋转角度;
5、基于第一虹膜纹理特征、第二虹膜纹理特征和眼球旋转角度,确定眼球模型的眼球自转角度。
6、在一些实施例中,眼球模型是基于红外相机采集的图像和可见光相机采集的图像构建的眼球模型;
7、获取眼球模型看向第一预设位置对应的第一虹膜纹理特征以及眼球模型看向第二预设位置对应的第二虹膜纹理特征,包括:
8、获取红外相机和可见光相机分别对看向第一预设位置的眼球进行图像采集得到的第一图像组,以及红外相机和可见光相机分别对看向第二预设位置的眼球进行图像采集得到的第二图像组;
9、基于第一图像组,确定眼球模型看向第一预设位置对应的第一虹膜纹理特征;基于第二图像组,确定眼球模型看向第二预设位置对应的第二虹膜纹理特征。
10、在一些实施例中,基于眼球模型的中心对称轴和眼球中心的三维空间位置信息,确定眼球模型的眼球旋转角度,包括:
11、将眼球模型看向第一预设位置时的眼球中心与眼球模型看向第二预设位置时的眼球中心重合;
12、计算眼球模型看向第一预设位置时的中心对称轴与眼球模型看向第二预设位置时的中心对称轴重合对应的角度作为眼球模型的眼球旋转角度。
13、在一些实施例中,基于第一虹膜纹理特征、第二虹膜纹理特征和眼球旋转角度,确定眼球模型的眼球自转角度,包括:
14、基于眼球旋转角度,旋转眼球模型,以使眼球模型看向第一预设位置时的中心对称轴与眼球模型看向第二预设位置时的中心对称轴重合;
15、在中心对称轴重合后,沿中心对称轴旋转眼球模型的虹膜纹理,使第一虹膜纹理特征与第二虹膜纹理特征重合,得到眼球模型的自转角度。
16、在一些实施例中,眼球模型的中心对称轴和眼球中心的三维空间位置信息通过如下方式确定:
17、将眼球模型的虹膜边缘对应的三维空间中的椭圆或圆的圆心为垂足,垂直眼球模型的虹膜所在平面的直线为眼球模型的中心对称轴;
18、基于眼球模型的虹膜中心与眼球中心之间的距离以及虹膜中心的三维空间位置信息,在以虹膜中心为垂足且垂直于虹膜所在平面的直线上确定眼球中心的三维空间位置信息。
19、在一些实施例中,眼球模型的虹膜中心与眼球中心之间的距离通过以下方式确定:
20、获取眼球模型看向第一预设位置时经过虹膜中心且垂直于虹膜中心所在虹膜平面的第一直线以及眼球模型看向第二预设位置时经过虹膜中心且垂直于虹膜中心所在虹膜平面的第二直线;
21、将第一直线与第二直线的交点确定为眼球模型的眼球中心;
22、计算眼球模型的虹膜中心与眼球中心之间的距离。
23、在一些实施例中,虹膜中心的三维空间位置信息通过以下方式确定:
24、基于虹膜边缘上的点的三维空间位置信息,拟合得到表征虹膜边缘的椭圆或圆;
25、确定椭圆或圆的中心的三维空间位置为虹膜中心的三维空间位置。
26、第二方面,本公开实施例还提出一种眼球自转角度的确定装置,该装置包括:
27、获取单元,用于获取眼球模型看向第一预设位置对应的第一虹膜纹理特征以及眼球模型看向第二预设位置对应的第二虹膜纹理特征;
28、第一确定单元,用于基于眼球模型的中心对称轴和眼球中心的三维空间位置信息,确定眼球模型的眼球旋转角度;
29、第二确定单元,用于基于第一虹膜纹理特征、第二虹膜纹理特征和眼球旋转角度,确定眼球模型的眼球自转角度。
30、第三方面,本公开实施例还提出一种电子设备,其中,包括存储器、处理器以及存储在所述存储器上的计算机程序,其中,所述处理器执行所述计算机程序以实现如第一方面所述眼球自转角度的确定方法的步骤。
31、第四方面,本公开实施例还提出一种计算机可读存储介质,其中,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如第一方面所述眼球自转角度的确定方法的步骤。
32、可见,本公开的至少一个实施例中,通过获取眼球模型看向第一预设位置对应的第一虹膜纹理特征以及眼球模型看向第二预设位置对应的第二虹膜纹理特征;进而,基于眼球模型的中心对称轴和眼球中心的三维空间位置信息,确定眼球模型的眼球旋转角度;从而,基于第一虹膜纹理特征、第二虹膜纹理特征和眼球旋转角度,确定眼球模型的眼球自转角度。因此,基于眼球模型的眼球自转角度,使得估计出的视线与实际视线相符,另外,可以在光学显示上进行针对性地补偿、在瞳距调节时进行针对性的微调、估计眼球的朝向以及预测显示光路在用户的视网膜上的成像分布也有必要。
技术特征:
1.一种眼球自转角度的确定方法,所述方法包括:
2.根据权利要求1所述的方法,其中,所述眼球模型是基于红外相机采集的图像和可见光相机采集的图像构建的眼球模型;
3.根据权利要求1所述的方法,其中,所述基于所述眼球模型的中心对称轴和眼球中心的三维空间位置信息,确定所述眼球模型的眼球旋转角度,包括:
4.根据权利要求1所述的方法,其中,所述基于所述第一虹膜纹理特征、所述第二虹膜纹理特征和所述眼球旋转角度,确定所述眼球模型的眼球自转角度,包括:
5.根据权利要求1所述的方法,其中,所述眼球模型的中心对称轴和眼球中心的三维空间位置信息通过如下方式确定:
6.根据权利要求5所述的方法,其中,所述眼球模型的虹膜中心与眼球中心之间的距离通过以下方式确定:
7.根据权利要求5所述的方法,其中,所述虹膜中心的三维空间位置信息通过以下方式确定:
8.一种眼球自转角度的确定装置,所述装置包括:
9.一种电子设备,其中,包括存储器、处理器以及存储在所述存储器上的计算机程序,其中,所述处理器执行所述计算机程序以实现如权利要求1至7任一项所述眼球自转角度的确定方法的步骤。
10.一种计算机可读存储介质,其中,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至7任一项所述眼球自转角度的确定方法的步骤。
技术总结
本公开涉及一种眼球自转角度的确定方法、装置、设备及存储介质。本公开的至少一个实施例中,通过获取眼球模型看向第一预设位置对应的第一虹膜纹理特征以及眼球模型看向第二预设位置对应的第二虹膜纹理特征;进而,基于眼球模型的中心对称轴和眼球中心的三维空间位置信息,确定眼球模型的眼球旋转角度;从而,基于第一虹膜纹理特征、第二虹膜纹理特征和眼球旋转角度,确定眼球模型的眼球自转角度。因此,基于眼球模型的眼球自转角度,使得估计出的视线与实际视线相符,另外,可以在光学显示上进行针对性地补偿、在瞳距调节时进行针对性的微调、估计眼球的朝向以及预测显示光路在用户的视网膜上的成像分布也有必要。
技术研发人员:胡飞扬
受保护的技术使用者:北京极溯光学科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!