一种建筑小车的施工方法、装置、建筑小车及存储介质与流程
本发明实施例涉及建筑机器人,尤其涉及一种建筑小车的施工方法、装置、建筑小车及存储介质。
背景技术:
1、在建筑施工的过程中,为了节约人力提高效率,建筑小车逐渐得到了较为广泛的应用。目前在建筑小车施工的过程中,通常根据空间地图规划施工线路,并直接控制建筑小车按照规划好的施工线路执行完整作业。但是由于作业工具的安装、建筑小车的运动或者作业墙面本身可能存在误差,导致作业工具的相对位置不再满足作业要求,从而影响了施工效果。
技术实现思路
1、本发明实施例提供一种建筑小车的施工方法、装置、建筑小车及存储介质,以保证作业工具的相对位置满足作业要求,从而提升施工效果。
2、第一方面,本发明实施例提供了一种建筑小车的施工方法,该方法包括:
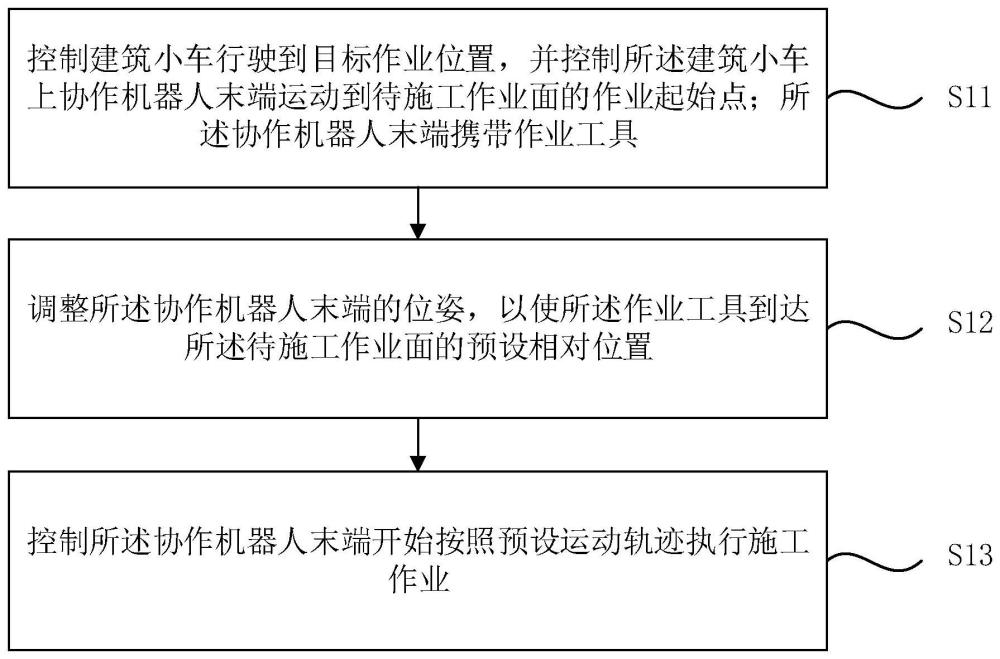
3、控制建筑小车行驶到目标作业位置,并控制所述建筑小车上协作机器人末端运动到待施工作业面的作业起始点;所述协作机器人末端携带作业工具;
4、调整所述协作机器人末端的位姿,以使所述作业工具到达所述待施工作业面的预设相对位置;
5、控制所述协作机器人末端开始按照预设运动轨迹执行施工作业。
6、可选的,所述施工作业包括距离作业;
7、相应的,所述调整所述协作机器人末端的位姿,以使所述作业工具到达所述待施工作业面的预设相对位置,包括:
8、调整所述协作机器人末端的姿态,并测量各种姿态下所述协作机器人末端到所述待施工作业面的距离;
9、调整所述协作机器人末端至所述距离中最短距离对应的姿态,以使所述作业工具正对所述待施工作业面。
10、可选的,在所述控制所述协作机器人末端开始按照预设运动轨迹执行施工作业之后,还包括:
11、将所述最短距离作为初始的对正测量值,每间隔预设时长测量一次所述协作机器人末端到所述待施工作业面的距离,得到实际测量值;
12、若所述实际测量值与所述对正测量值之间的变动值大于预设阈值,则重新调整所述协作机器人末端的姿态,以使所述作业工具正对所述待施工作业面,并使用调整后所述协作机器人末端到所述待施工作业面的距离更新所述对正测量值。
13、可选的,所述施工作业包括贴紧作业;
14、相应的,所述调整所述协作机器人末端的位姿,以使所述作业工具到达所述待施工作业面的预设相对位置,包括:
15、测量所述作业工具在所述待施工作业面上的实际压力值;
16、当所述实际压力值与预设压力值之间的差值在预设压力差范围以外时,若所述实际压力值大于所述预设压力值,则调整所述协作机器人末端远离所述待施工作业面移动预设距离,若所述实际压力值小于所述预设压力值,则调整所述协作机器人末端靠近所述待施工作业面移动所述预设距离。
17、可选的,在所述控制所述协作机器人末端开始按照预设运动轨迹执行施工作业之后,还包括:
18、实时测量所述实际压力值,当所述实际压力值与所述预设压力值之间的差值在所述预设压力差范围以外时,暂停执行所述施工作业,若所述实际压力值大于所述预设压力值,则控制所述协作机器人末端远离所述待施工作业面移动所述预设距离,若所述实际压力值小于所述预设压力值,则控制所述协作机器人末端靠近所述待施工作业面移动所述预设距离,直至所述实际压力值与所述预设压力值之间的差值在所述预设压力差范围以内时继续执行所述施工作业。
19、可选的,在所述控制所述协作机器人末端开始按照预设运动轨迹执行施工作业之后,还包括:
20、当所述待施工作业面上的所述施工作业完成时,根据预设间隔对所述待施工作业面进行单元格划分,并测量得到每个单元格的误差数据;
21、根据所述误差数据确定所述待施工作业面的修正云图;
22、根据所述修正云图对所述待施工作业面进行局部修正。
23、可选的,所述测量得到每个单元格的误差数据,包括:
24、通过3d激光扫描仪对所述待施工作业面进行空间扫描,得到全体点云数据;
25、根据所述全体点云数据拟合得到虚拟面;
26、计算每个所述单元格中的区域点云数据到所述虚拟面的平均值作为对应所述单元格的所述误差数据。
27、第二方面,本发明实施例还提供了一种建筑小车的施工装置,该装置包括:
28、作业前往模块,用于控制建筑小车行驶到目标作业位置,并控制所述建筑小车上协作机器人末端运动到待施工作业面的作业起始点;所述协作机器人末端携带作业工具;
29、位姿调整模块,用于调整所述协作机器人末端的位姿,以使所述作业工具到达所述待施工作业面的预设相对位置;
30、作业执行模块,用于控制所述协作机器人末端开始按照预设运动轨迹执行施工作业。
31、第三方面,本发明实施例还提供了一种建筑小车,该建筑小车包括:
32、一个或多个处理器;
33、存储器,用于存储一个或多个程序;
34、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本发明任意实施例所提供的建筑小车的施工方法。
35、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明任意实施例所提供的建筑小车的施工方法。
36、本发明实施例提供了一种建筑小车的施工方法,首先控制建筑小车行驶到目标作业位置,并控制建筑小车上协作机器人末端运动到待施工作业面的作业起始点,其中的协作机器人末端携带有作业工具,然后调整协作机器人末端的位姿,以使作业工具到达待施工作业面的预设相对位置,再控制协作机器人末端开始按照预设运动轨迹执行施工作业。本发明实施例所提供的建筑小车的施工方法,通过在执行施工作业前,首先调整协作机器人末端的位姿,保证了作业工具的相对位置可以满足作业要求,从而避免了作业工具的安装、建筑小车的运动或者作业墙面本身产生的误差的影响,提升了施工效果。
技术特征:
1.一种建筑小车的施工方法,其特征在于,包括:
2.根据权利要求1所述的建筑小车的施工方法,其特征在于,所述施工作业包括距离作业;
3.根据权利要求2所述的建筑小车的施工方法,其特征在于,在所述控制所述协作机器人末端开始按照预设运动轨迹执行施工作业之后,还包括:
4.根据权利要求1所述的建筑小车的施工方法,其特征在于,所述施工作业包括贴紧作业;
5.根据权利要求4所述的建筑小车的施工方法,其特征在于,在所述控制所述协作机器人末端开始按照预设运动轨迹执行施工作业之后,还包括:
6.根据权利要求1所述的建筑小车的施工方法,其特征在于,在所述控制所述协作机器人末端开始按照预设运动轨迹执行施工作业之后,还包括:
7.根据权利要求6所述的建筑小车的施工方法,其特征在于,所述测量得到每个单元格的误差数据,包括:
8.一种建筑小车的施工装置,其特征在于,包括:
9.一种建筑小车,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的建筑小车的施工方法。
技术总结
本发明实施例公开了一种建筑小车的施工方法、装置、建筑小车及存储介质。该方法包括:控制建筑小车行驶到目标作业位置,并控制所述建筑小车上协作机器人末端运动到待施工作业面的作业起始点;所述协作机器人末端携带作业工具;调整所述协作机器人末端的位姿,以使所述作业工具到达所述待施工作业面的预设相对位置;控制所述协作机器人末端开始按照预设运动轨迹执行施工作业。本发明实施例所提供的技术方案,通过在执行施工作业前,首先调整协作机器人末端的位姿,保证了作业工具的相对位置可以满足作业要求,从而避免了作业工具的安装、建筑小车的运动或者作业墙面本身产生的误差的影响,提升了施工效果。
技术研发人员:刘东,廖群辉,田新泉,麦之超,李栋,赵纪,李甲
受保护的技术使用者:华西工程科技(深圳)股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!