吊机的吊起异常检测方法、装置、计算机设备和存储介质与流程
本申请涉及吊机,特别是涉及一种吊机的吊起异常检测方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、现阶段,已有人工监控、光电检测、激光雷达检测、基于计算机视觉的目标检测等多种方式可实现对集卡误吊起的检测。由于人工检测和光电检测的效果欠佳,目前主流的方法包括计算机视觉原理下的目标检测方法。
2、在计算机视觉原理的传统方法中,采用特征点匹配算法,通过比较视频每一帧中的特征点与起吊前画面中的特征点,计算特征点之间的坐标变化,判断集卡是否被误吊起。基于计算机视觉的方法效果受到环境的影响,准确性较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种吊机的吊起异常检测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。其准确性高,且所需处理资源低。
2、第一方面,本申请提供了一种吊机的吊起异常检测方法,所述方法包括:
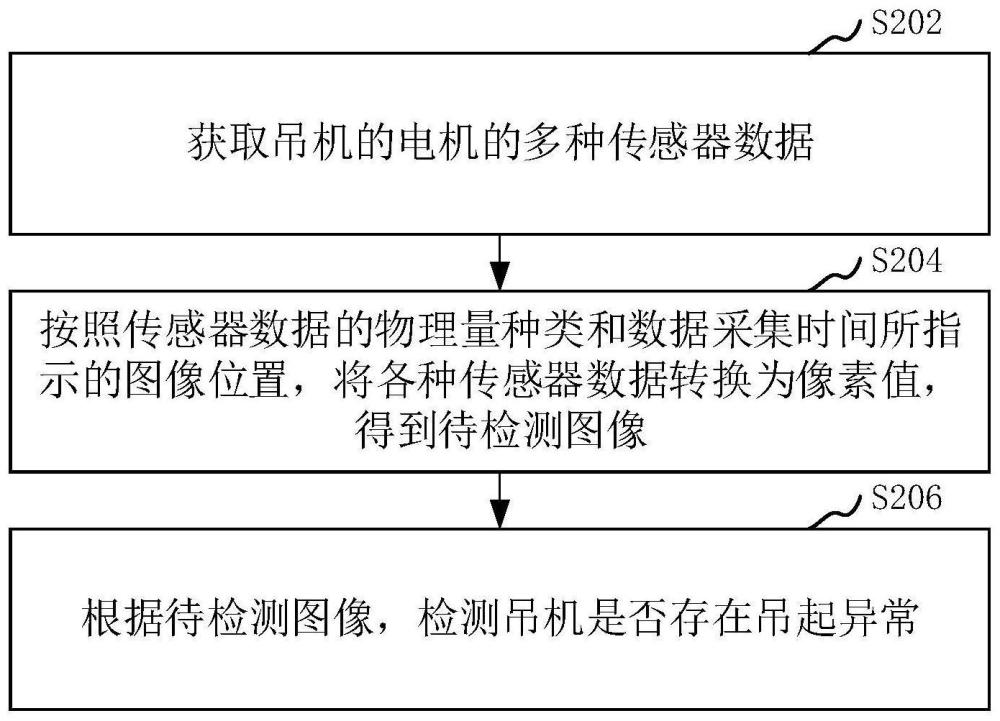
3、获取吊机的电机的多种传感器数据;
4、按照所述传感器数据的物理量种类和数据采集时间所指示的图像位置,将各种所述传感器数据转换为像素值,得到待检测图像;
5、根据所述待检测图像,检测所述吊机是否存在吊起异常。
6、在其中一个实施例中,所述按照所述传感器数据的物理量种类和数据采集时间所指示的图像位置,将各种所述传感器数据转换为像素值,得到待检测图像,包括:
7、按照物理量种类与数据采集时间,确定各种所述传感器数据匹配的物理量位置与时间位置;
8、按照所述物理量位置和所述时间位置,将各种所述传感器数据转为像素值,得到待检测图像。
9、在其中一个实施例中,所述按照物理量种类与数据采集时间,确定各种所述传感器数据匹配的物理量位置与时间位置,包括:
10、在由物理量种类排列成的各物理量刻度中,分别确定各种所述传感器数据各自匹配的物理量位置;
11、在时间窗口内的各时间刻度中,按照数据采集时间确定各种所述传感器数据的时间位置。
12、在其中一个实施例中,所述按照所述物理量位置和所述时间位置,将各种所述传感器数据转为像素值,得到待检测图像,包括:
13、按照所述物理量位置和所述时间位置的交集位置,确定各种所述传感器数据的区域位置;
14、在各种所述传感器数据的区域位置,按照各种所述传感器数据的数值生成各种所述传感器数据的像素值,得到待检测图像。
15、在其中一个实施例中,所述待检测图像输入到用于检测所述吊机的吊起异常的训练后神经网络模型,以检测所述吊机的吊起异常;所述方法还包括:
16、对聚类模型的深度、宽度及分辨率分别进行网络结构缩放,得到缩放后聚类模型;
17、通过所述缩放后聚类模型进行特征编码,得到编码后特征;
18、根据所述编码后特征训练所述缩放后聚类模型,得到训练后神经网络模型,得到所述训练后神经网络模型。
19、在其中一个实施例中,所述待检测图像输入到用于检测所述吊机的吊起异常的训练后神经网络模型,以检测所述吊机的吊起异常;所述方法还包括:
20、对样本数据分别进行降维编码,得到样本特征;
21、确定所述样本特征的中心特征;
22、基于所述样本特征与所述特征中心之间的距离,确定所述样本特征的损失值;
23、根据所述样本特征的损失值,对聚类模型进行半监督聚类训练,直至满足收敛条件时,得到所述训练后神经网络模型。
24、在其中一个实施例中,所述样本特征包括正常样本特征和异常样本特征;
25、所述基于所述样本特征与所述特征中心之间的距离,确定所述样本特征的损失值,包括:
26、根据所述正常样本特征与所述特征中心之间的距离,确定正常样本特征偏差距离;
27、根据所述异常样本特征与所述特征中心之间的距离,确定异常样本特征偏差距离;
28、基于所述正常样本特征偏差距离正相关的损失值,确定所述正常样本特征的损失值;
29、基于所述异常样本特征偏差距离负相关的损失值,确定所述异常样本特征的损失值。
30、第二方面,本申请还提供了一种吊机的吊起异常检测装置,所述装置包括:
31、数据获取模块,用于获取吊机的电机的多种传感器数据;
32、数据转换模块,用于按照所述传感器数据的物理量种类和数据采集时间所指示的图像位置,将各种所述传感器数据转换为像素值,得到待检测图像;
33、异常检测模块,用于根据所述待检测图像,检测所述吊机是否存在吊起异常。
34、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任意实施例中吊机的吊起异常检测的步骤。
35、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意实施例中吊机的吊起异常检测的步骤。
36、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任意实施例中吊机的吊起异常检测的步骤。
37、上述吊机的吊起异常检测方法、装置、计算机设备、存储介质和计算机程序产品,获取吊机的电机的多种传感器数据,由于电机设置于吊机内部,其受到环境影响较小,且由于吊机的弹簧的拉伸将会导致电机的负载出现异常,而对电机的多种传感器数据的综合考虑,需要特征工程,以使得这一异常能够反映出来;按照传感器数据的物理量种类和数据采集时间所指示的图像位置,将各种传感器数据转换为像素值,得到待检测图像,该过程是通过物理量种类和数据采集时间两个角度进行传感器数据转换,可将包含物理量种类、数据采集时间和传感器数据这三个维度的数据,通过具有两个维度的图像展示出来,使得该过程的处理资源相对较低;最后,根据待检测图像,检测吊机是否存在吊起异常,由于同一待检测图像能够分别对物理量和时间维度进行综合检测,能够更为准确地检测吊机是否存在吊起异常。基于此,采用本方法能够通过较少资源,更准确地判断吊机所吊起的对象是否正常。
技术特征:
1.一种吊机的吊起异常检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述按照所述传感器数据的物理量种类和数据采集时间所指示的图像位置,将各种所述传感器数据转换为像素值,得到待检测图像,包括:
3.根据权利要求2所述的方法,其特征在于,所述按照物理量种类与数据采集时间,确定各种所述传感器数据匹配的物理量位置与时间位置,包括:
4.根据权利要求2所述的方法,其特征在于,所述按照所述物理量位置和所述时间位置,将各种所述传感器数据转为像素值,得到待检测图像,包括:
5.根据权利要求1所述的方法,其特征在于,所述待检测图像输入到用于检测所述吊机的吊起异常的训练后神经网络模型,以检测所述吊机的吊起异常;所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述待检测图像输入到用于检测所述吊机的吊起异常的训练后神经网络模型,以检测所述吊机的吊起异常;所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述样本特征包括正常样本特征和异常样本特征;
8.一种吊机的吊起异常检测装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种吊机的吊起异常检测方法、装置、计算机设备和存储介质。所述方法包括:获取吊机的电机的多种传感器数据;按照所述传感器数据的物理量种类和数据采集时间所指示的图像位置,将各种所述传感器数据转换为像素值,得到待检测图像;根据所述待检测图像,检测所述吊机是否存在吊起异常。采用本方法能够通过较少资源,更准确地判断吊机所吊起的对象是否正常。
技术研发人员:刘嘉杰,魏勇超,魏勇豪,吴邦春,魏来巍,周航宇,李少兵,鲁路
受保护的技术使用者:深圳市测力佳控制技术有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!