一种基于距离与密度的点云背景自适应过滤方法
本发明涉及一种点云背景过滤方法,具体为一种基于距离与密度的点云背景自适应过滤方法,属于点云数据处理与激光雷达。
背景技术:
1、空间感知是物联网领域的基础,它通过传感器辨别和理解周围环境,使系统能够准确解释物理世界中物体之间的空间关系。激光雷达可以获取物体的三维信息,因其具有高测距精度、广泛的测量范围、卓越的抗干扰能力和强隐私安全性,从而使得激光雷达在空间感知领域展现出巨大潜力。然而,激光雷达数据量大、数据冗余以及数据处理时间长等问题,制约了其在空间感知领域的应用。
2、尽管激光雷达产生的点云数据庞大,但其中相当一部分是冗余数据,如地面、树木、建筑物等环境背景以及其他数据噪声。这些背景噪声降低了处理效率,增加了处理时间,并需要更多的计算资源。此外,背景噪声还影响到点云数据的密度、分布和精度,导致数据处理精度的下降。因此,过滤掉背景点云可以减少点云数据的干扰因素,改善点云数据质量,提高点云处理效率,同时还可以加快数据传输时间,降低存储成本。
3、现有技术中,1)公告号为cn114638853b公开的一种基于路侧固态激光雷达的背景过滤方法和系统,该背景过滤方法主要采用简单的背景差分与聚类的结合策略,但这种方法的过滤效果并不理想,同时,受到点云数据量大的限制,往往处理时间较长,导致缺乏时效性;2)基于最大距离的背景差分的方法是处理点云数据最常用的方法,该方法是使用每个方向角的最远距离构建背景矩阵以实现背景差分,其实时性方面表现良好,然而过滤精度尚不理想;3)另一种方法是结合最大距离差分与基于密度的空间聚类,其精度方面有了显著提升,然而由于点云数据量庞大,常规聚类算法的时间成本过高,影响了实时性;4)基于深度学习的方法,尽管可以有效区分点云数据中的动态点云和非动态点云,进而实现背景过滤,但其需要采集、标记大量的样本数据进行深度学习模型的训练,实现的成本较高。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供一种基于距离与密度的点云背景自适应过滤方法。
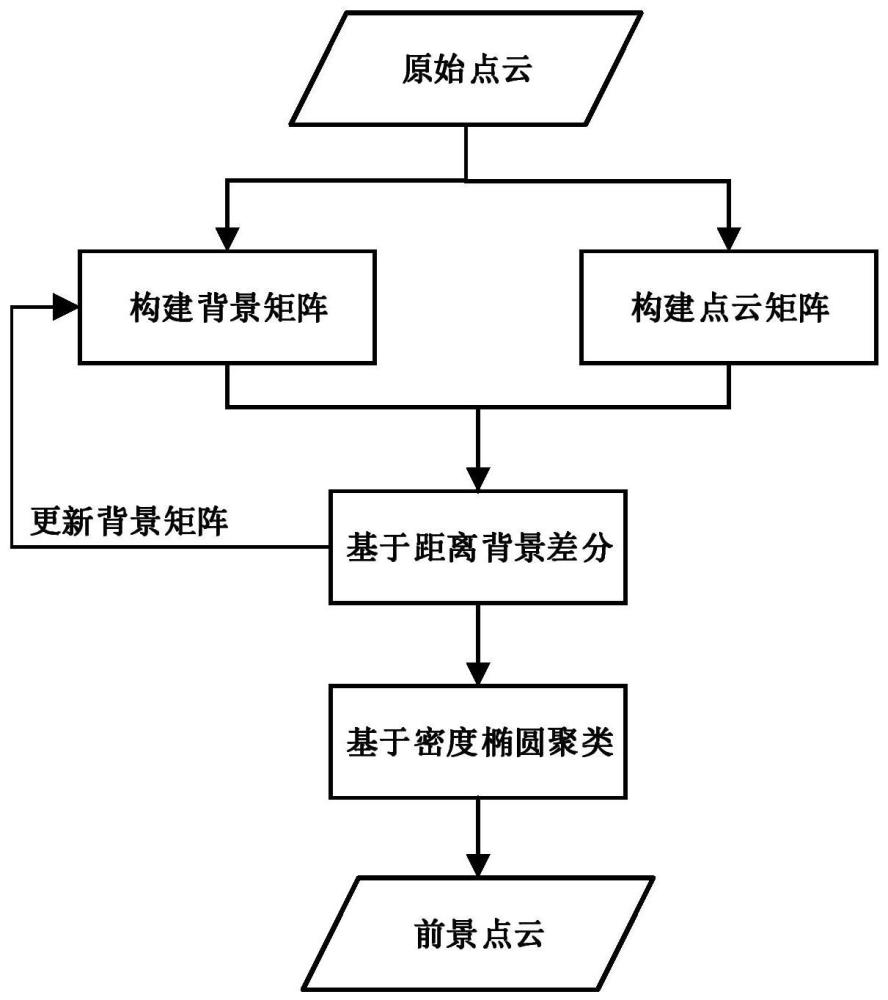
2、本发明通过以下技术方案来实现上述目的:一种基于距离与密度的点云背景自适应过滤方法,该点云背景自适应过滤方法包括以下步骤:
3、s1、利用机械式激光雷达计算点云的极坐标形成点云数据,并将点云数据转化为矩阵形式,并构建点云矩阵与背景矩阵;
4、s2、根据极角的大小采取不同的对比参数将所述的点云矩阵和背景矩阵进行差分处理,同时动态更新背景矩阵;
5、s3、在差分后的点云矩阵上应用基于点云密度的椭圆形聚类模型进行精准的自适应聚类,得到最终的前景点云。
6、作为本发明再进一步的方案:s1中,机械式激光雷达的激光发射器垂直排列,并通过固定机构旋转以捕捉视场角内的点云数据,因此同一激光束上的所有点都具有相同的极角,通过与激光雷达校准文件进行比较,获得每个极角对应的光束号。
7、作为本发明再进一步的方案:s1具体包括:
8、s11、计算输入点云中每一个点的极坐标值,基于计算得到的极角参数和方位角参数构建点云矩阵,点云矩阵的行值i和列值j计算公式如下:
9、i=nid
10、
11、其中,nid表示光束编号,由极角参数的具体数值确定,p(φ)表示点的方位角值,θh表示激光雷达的水平分辨率;
12、s12、将输入的第一帧点云基于s11步骤计算得到的点云矩阵设置为背景矩阵。
13、作为本发明再进一步的方案:s2具体包括:
14、s21、将后续通过s11步骤计算得到的点云矩阵,基于其与背景矩阵中相应点的极角参数,选择点云矩阵中具有较大z坐标绝对值的点或径向距离值的点,来更新背景矩阵,具体的更新策略计算公式如下:
15、
16、其中,参数α表示设定的极角阈值,pi,j(θ)表示点云矩阵中点的极角值,mi,j(θ)表示背景矩阵中点的极角值,pi,j(|z|)表示点云矩阵中点的z坐标的绝对值,mi,j(|z|)表示背景矩阵中点的z坐标的绝对值,pi,j(r)表示点云矩阵中点的径向距离值,mi,j(r)表示背景矩阵中点的径向距离值;
17、s22、移除点云矩阵中与背景矩阵具有相同坐标值的点,获得差分后的点云矩阵。
18、作为本发明再进一步的方案:s3具体包括:
19、s31、对于经过差分处理后的点云矩阵中的点,遍历其在点云矩阵的具体位置中相邻的上下k行及左右q列范围内的所有邻近点,计算这些邻近点是否位于特定的椭圆形聚类区域内,椭圆的赤道半径a、b和极半径c计算公式如下:
20、
21、
22、
23、
24、
25、其中,ε和d表示控制赤道半径a的参数;
26、s32、若某一点的邻近点存在并满足上述椭圆聚类条件,则将该点及其邻近点归纳为一个簇;若无满足条件的邻近点存在,则将该点所在的簇从点云矩阵中移除;如果簇内点的数量超过密度参数,则将簇内的所有点标记为前景点;如果簇内点的数量没有超过密度参数,则对簇内的其他点重复s31、s32步骤;
27、s33、整合点云矩阵中所有标识为前景的点,构成前景点云。
28、本发明的有益效果是:
29、1)本发明通过固定站激光雷达扫描获得的数据能够有效滤除大部分背景噪声,从而确保数据的高准确性及传输效率,并且本发明适用于不同环境的固定站激光雷达,包括且不限于室内外各种复杂环境;
30、2)本发明在保持较高的背景过滤精度的同时,实现了数据的实时处理,确保了信息的时效性和即时性;
31、3)本发明在处理点云数据时,依据激光雷达的特性,将点云数据转化为矩阵形式,并构建点云矩阵与背景矩阵,在背景差分过程中,对距离参数进行了精细调整,更加符合点云数据的本质特性,在聚类过程中利用矩阵随机访问的特性,并采用更加适合点云数据特性的椭圆形聚类方法,有效地缩短了数据处理时间。尤其对于多线激光雷达数据量的降低具有显著助益,同时能够在确保数据准确性的基础上,高效地保留关键信息,极大地促进了后续点云处理工作的便捷性。因此,该发明对于道路环境实时监测、室内人流量实时监测等多个领域展现出了显著的应用价值和广阔的市场潜力。
技术特征:
1.一种基于距离与密度的点云背景自适应过滤方法,其特征在于,所述点云背景自适应过滤方法包括以下步骤:
2.根据权利要求1所述的点云背景自适应过滤方法,其特征在于,所述s1中:所述机械式激光雷达的激光发射器垂直排列,并通过固定机构旋转以捕捉视场角内的点云数据,因此,同一激光束上的所有点都具有相同的极角,通过与激光雷达校准文件进行比较,获得每个极角对应的光束号。
3.根据权利要求1或2所述的点云背景自适应过滤方法,其特征在于,所述s1具体包括:
4.根据权利要求3所述的点云背景自适应过滤方法,其特征在于,所述s2具体包括:
5.根据权利要求4所述的点云背景自适应过滤方法,其特征在于:所述s3具体包括:
技术总结
本发明公开了一种基于距离与密度的点云背景自适应过滤方法,包括以下步骤:依据激光雷达的特性,将点云数据转化为矩阵形式,并构建点云矩阵与背景矩阵;通过对比点云矩阵和背景矩阵的距离参数,实现对点云矩阵的背景差分处理;在差分后的点云矩阵上应用基于密度的椭圆形聚类模型进行自适应聚类。本发明的有益效果是:本发明主要解决固定站激光雷达数据量大、数据冗余以及处理时间长等问题,通过采用基于距离与密度的点云背景自适应过滤方法,可以有效地减低固定站激光雷达的数据量、更准确地保留有效数据、并显著缩短处理时间。
技术研发人员:肖文,李培广,唐苗,陈能成
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!