一种手术室手势指令操作装置的制作方法
本技术属于医疗设备,具体涉及一种手术室手势指令操作装置。
背景技术:
1、本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
2、目前手势识别系统已经应用在医疗领域,对病人、医生的辅助医疗的作用很大,可以应用在影像、检验以及问诊中,但是目前,在手术环境中,主治医生在对病人手术的过程中,由于无菌以及时间紧张的缘故,医生不能随意用手碰触其他的物品,也不能随意的进行走动,无法对其他设备进行手动操控,在根据病人实时的病灶图像进行手术时,无法自行操控调节某一需要放大或者缩小的病灶部位图像,而且如果使用语音识别,本地离线语音会由于各个地域的人方言等问题造成无法识别,使用网络第三方语音识别会增加使用成本或者由于网络延迟造成延误,从而造成手术的延误,不能精准的处理操作病人实时的病灶图像。
3、在现有的手势指令操作的装置中,无法对摄像头的旋转角度、高度以及手势指令器同时进行可拆卸或者旋转操作,不能适应不同身高的医生,具有不便利性。
技术实现思路
1、本实用新型为了解决上述问题,提出了一种手术室手势指令操作装置,本实用新型通过利用可拆卸的结构,将摄像头与手势指示器整体设置,实现对术中手势操作的多功能的辅助实现。
2、根据一些实施例,本实用新型提供了一种手术室手势指令操作装置,采用如下技术方案:
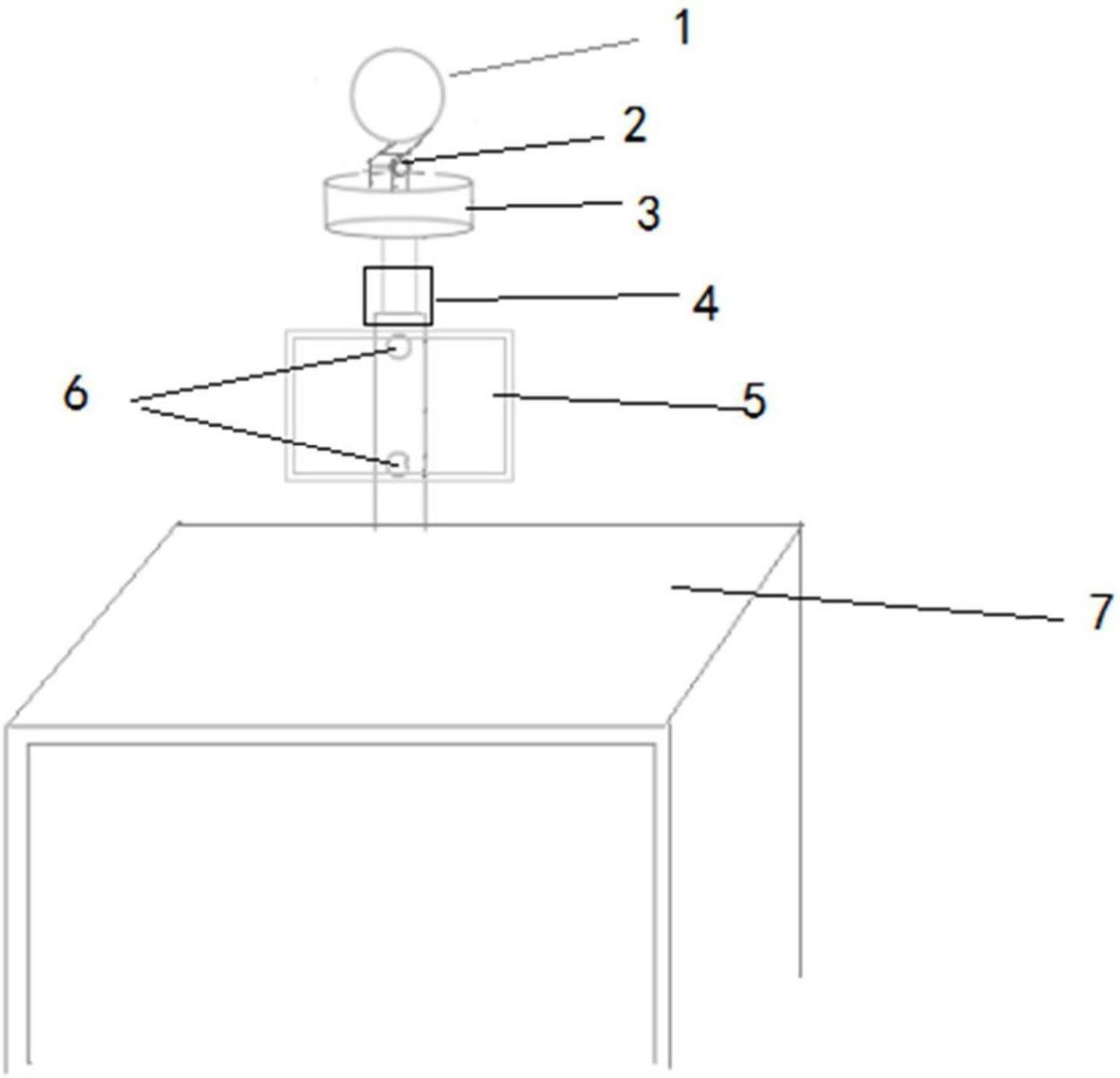
3、一种手术室手势指令操作装置,其特征在于,包括摄像头、手势指示器、控制器以及移动承载桌,所述控制器与所述手势指示器通过外壳封装成整体,在所述移动承载桌上固定设置承接杆,所述承接杆的中部设置磁力吸合部,所述外壳背部设置吸铁石,所述承接杆与所述外壳通过磁力吸合部和吸铁石连接,所述承接杆的顶部设置摄像头,所述摄像头通过旋转部与所述承接杆旋转连接,所述承接杆设置伸缩部,所述伸缩部位于所述磁力吸合部与顶端旋转部之间。
4、进一步的,所述承接杆的磁力吸合部包括上下固定在承接杆上的吸铁石结构。
5、进一步的,所述伸缩部包括两层伸缩节,所述两层伸缩节分别为第一层伸缩节和第二层伸缩节,所述两层伸缩节之间为具有规定长度圆杆套接。
6、进一步的,所述旋转部包括底座、锁紧螺栓以及旋转杆,所述旋转杆通过所述锁紧螺栓与所述底座旋转连接。
7、进一步的,所述摄像头的位置设置为可旋转,能够根据使用者自身条件调整到适宜位置。
8、进一步的,所述底座包括底盖和卡接座,所述底座与所述卡接座卡接,底盖设置在底座上方。
9、进一步的,所述手势指示器设置有供电接口和通信接口。
10、进一步的,所述移动承载桌底角上设置有滑动轮。
11、进一步的,在外壳内,控制器设置在手势指示器的后方,并通过hdmi线缆进行连接。
12、进一步的,所述摄像头与控制器可通过usb线缆连接。
13、与现有技术相比,本实用新型的有益效果为:
14、本实用新型利用手势指示器以及摄像头,解决了手术室环境中,主治医师在手术过程中无法对其他设备进行手动操控,而且如果使用语音识别,若使用本地离线语音会由于各个地域的人方言等问题造成无法识别,而使用网络第三方语音识别会增加使用成本或者由于网络延迟造成延误的问题。
15、本实用新型的摄像头、手势指示器以及高度、位置为可调整设计,能够根据使用者自身条件调整到适宜位置,手势指示器为可拆卸,方便拿取使用,摄像头以及承接杆能够适应不同角度以及不同高度的人使用。
技术特征:
1.一种手术室手势指令操作装置,其特征在于,包括摄像头、手势指示器、控制器以及移动承载桌,所述控制器与所述手势指示器通过外壳封装成整体,在所述移动承载桌上固定设置承接杆,所述承接杆的中部设置磁力吸合部,所述外壳背部设置吸铁石,所述承接杆与所述外壳通过磁力吸合部和吸铁石连接,所述承接杆的顶部设置摄像头,所述摄像头通过旋转部与所述承接杆旋转连接,所述承接杆设置伸缩部,所述伸缩部位于所述磁力吸合部与顶端旋转部之间。
2.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,所述承接杆的磁力吸合部包括上下固定在承接杆上的吸铁石结构。
3.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,所述伸缩部包括两层伸缩节,所述两层伸缩节分别为第一层伸缩节和第二层伸缩节,所述两层伸缩节之间为具有规定长度圆杆套接。
4.如权利要求3所述的一种手术室手势指令操作装置,其特征在于,所述旋转部包括底座、锁紧螺栓以及旋转杆,所述旋转杆通过所述锁紧螺栓与所述底座旋转连接。
5.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,所述摄像头的位置设置为可旋转,能够根据使用者自身条件调整到适宜位置。
6.如权利要求4所述的一种手术室手势指令操作装置,其特征在于,所述底座包括底盖和卡接座,所述底座与所述卡接座卡接,底盖设置在底座上方。
7.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,所述手势指示器设置有供电接口和通信接口。
8.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,所述移动承载桌底角上设置有滑动轮。
9.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,在外壳内,控制器设置在手势指示器的后方,并通过hdmi线缆进行连接。
10.如权利要求1所述的一种手术室手势指令操作装置,其特征在于,所述摄像头与控制器可通过usb线缆连接。
技术总结
本技术提供了一种手术室手势指令操作装置,涉及医疗设备技术领域,包括摄像头、手势指示器、控制器以及移动承载桌,所述控制器与所述手势指示器通过外壳封装成整体,在所述移动承载桌上固定设置承接杆,所述承接杆的中部设置磁力吸合部,所述外壳背部设置吸铁石,所述承接杆与所述外壳通过磁力吸合部和吸铁石连接,所述承接杆的顶部设置摄像头,所述摄像头通过旋转部与所述承接杆旋转连接,所述承接杆设置伸缩部,所述伸缩部位于所述磁力吸合部与顶端旋转部之间,解决主治医师在手术过程中无法对其他设备进行方便调节操控的问题。
技术研发人员:刘宏伟,刘国瑞,张西祥
受保护的技术使用者:中际医学科技(山东)有限公司
技术研发日:20230601
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!