一种具有无介质全息投影功能的AI交互机器人的制作方法
本申请涉及交互机器人的,尤其是涉及一种具有无介质全息投影功能的ai交互机器人。
背景技术:
1、现阶段机器人的概念越发火热,市面上各种机器人层出不穷,它们或能进行直立行走和负重行走,或能与人对话和人对弈,又或能在人们的命令下进行精密的操作,现在人们的生活中见到最多的就是服务机器人,其主要包括语音控制、语音播报、导航等服务功能,确实给人们的生活提供了很多的便利。
2、相关技术中,服务机器人的功能有限,相当一部分服务机器人的活动都是通过电脑连接wifi远程操作的,无法使用人手直接对机器人进行控制,而有手指互动功能的服务机器人则可能会由于短时间内被多人先后触碰但不能及时消毒导致病菌的传播,存在待改进之处。
技术实现思路
1、为了使用户能够尽量无接触地触发交互机器人的服务动作,本申请提供一种具有无介质全息投影功能的ai交互机器人。
2、本申请提供的一种具有无介质全息投影功能的ai交互机器人采用如下的技术方案:
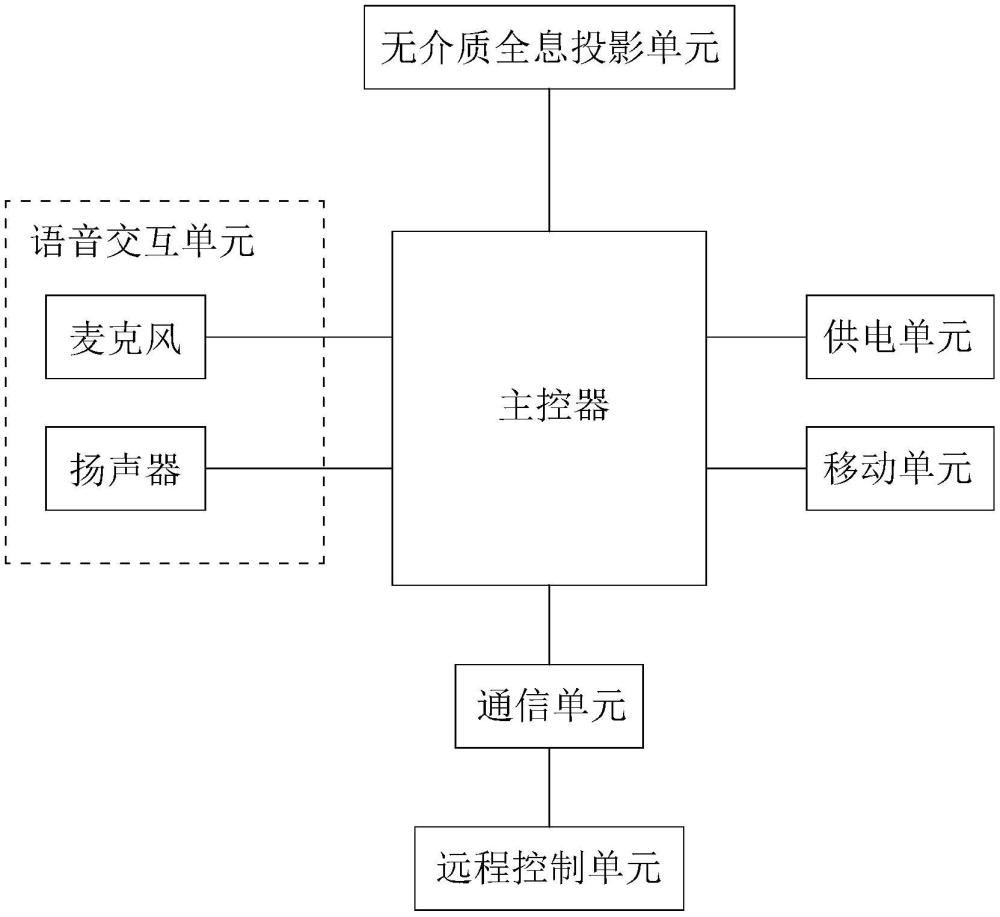
3、一种具有无介质全息投影功能的ai交互机器人,包括无介质全息投影单元,用于输入空中控制信号;控制器,与无介质全息投影单元相连接,用于接收所述空中控制信号,并向所述无介质全息投影单元输出空中输出内容。
4、通过采用上述技术方案,利用无介质全息投影单元使用户在空中向交互机器人输入空中控制信号,从而使机器人能够根据空中控制信号完成对应的交互服务,使用户能够尽量无接触地触发交互机器人的服务动作,更加方便,且干净卫生。
5、作为优选,包括语音交互单元,所述语音交互单元包括语音输入模块和语音输出模块;所述语音输入模块的输出端信号连接至所述控制器的输入端,用于向所述控制器输入语音控制信号;所述语音输出模块的输入端信号连接至所述控制器的输出端,所述控制器接收所述语音控制信号,并进行分析识别向所述语音输出模块输出语音输出内容。
6、通过采用上述技术方案,利用语音交互单元使用户能够实现和机器人的语音交互,从而提供另一种能够控制交互机器人的方式,从而使用户能够根据实际需求可选择地与机器人进行无接触互动。
7、作为优选,包括远程控制单元,所述远程控制单元通过通信单元与所述控制器信号连接。
8、通过采用上述技术方案,利用远程控制单元能够无介质全息投影单元和语音交互单元的启闭,从而能够使无接触交互机器人适用于不同的场景。作为优选,还包括移动单元,所述移动单元包括驱动件和行走装置,所述驱动件的控制端电连接至所述控制器的输出端,所述驱动件用于带动所述行走装置工作;所述控制器控制所述机器人。
9、作为优选,还包括移动单元,所述移动单元包括驱动件和行走装置,所述驱动件的控制端电连接至所述控制器的输出端,所述驱动件用于带动所述行走装置工作;所述控制器控制所述机器人。
10、通过采用上述技术方案,利用控制器控制驱动件的启闭,并通过行走装置使机器人能够实现自动移动。
11、作为优选,所述移动单元还包括自动避障模块,所述自动避障模块与所述控制器信号连接,用于采集周围的障碍信息并输出至所述控制器。
12、通过采用上述技术方案,利用自动避障模块能够实现自动避障功能,从而保护机器人以及过往人员的安全。
13、作为优选,所述移动单元话包括定位模块,所述定位模块与所述控制器信号连接,用于向所述控制器输出实时位置信息。
14、通过采用上述技术方案,能够了解交互机器人的实时位置。
15、作为优选,还包括供电单元,所述供电单元包括蓄电池以及电池管理模块;所述蓄电池的电压输出端电连接至所述电池管理模块的输入端,所述电池管理模块的输出端电连接至所述控制器的输出端;所述控制器通过所述电池管理模块设置所述蓄电池的最低电量阈值,当所述蓄电池的电量小于所述最低电量阈值时,所述电池管理模块向所述控制器输出低电量警报信号。
16、通过采用上述技术方案,实现无线供电,以便于使交互机器人的移动尽量不受到限制;并且利用电池管理模块能够实现电量管理功能。当蓄电池电量不足时,能够提醒相关人员及时充电。
17、作为优选,配置有充电桩,当所述控制器接收到所述低电量警报信号后控制所述机器人移动到所述充电桩充电。
18、通过采用上述技术方案,使机器人在低电量状态下能够自动移动至充电桩,更加方便。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1. 利用无介质全息投影单元以及语音交互单元,使用户能够在最大可能地实现和机器人的无接触交互,从而更加干净卫生地使用交互机器人;
21、2. 利用移动单元使交互机器人能够进行灵活移动,且通过自动避障功能以及定位功能使机器人以及用户的安全得到一定的保障;
22、3. 利用蓄电池以及电池管理单元,使机器人能够在低电量的状态下实现自动充电功能。
技术特征:
1.一种具有无介质全息投影功能的ai交互机器人,其特征在于:包括:
2.根据权利要求1所述的一种具有无介质全息投影功能的ai交互机器人,其特征在于:包括远程控制单元,所述远程控制单元通过通信单元与所述控制器信号连接。
3.根据权利要求1所述的一种具有无介质全息投影功能的ai交互机器人,其特征在于:还包括移动单元,所述移动单元包括驱动件和行走装置,所述驱动件的控制端电连接至所述控制器的输出端,所述驱动件用于带动所述行走装置工作;所述控制器控制所述机器人。
4.根据权利要求3所述的一种具有无介质全息投影功能的ai交互机器人,其特征在于:所述移动单元还包括自动避障模块,所述自动避障模块与所述控制器信号连接,用于采集周围的障碍信息并输出至所述控制器。
5.根据权利要求4所述的一种具有无介质全息投影功能的ai交互机器人,其特征在于:所述移动单元话包括定位模块,所述定位模块与所述控制器信号连接,用于向所述控制器输出实时位置信息。
6.根据权利要求5所述的一种具有无介质全息投影功能的ai交互机器人,其特征在于:还包括供电单元,所述供电单元包括蓄电池以及电池管理模块;所述蓄电池的电压输出端电连接至所述电池管理模块的输入端,所述电池管理模块的输出端电连接至所述控制器的输出端;所述控制器通过所述电池管理模块设置所述蓄电池的最低电量阈值,当所述蓄电池的电量小于所述最低电量阈值时,所述电池管理模块向所述控制器输出低电量警报信号。
7.根据权利要求6所述的一种具有无介质全息投影功能的ai交互机器人,其特征在于:配置有充电桩,当所述控制器接收到所述低电量警报信号后控制所述机器人移动到所述充电桩充电。
技术总结
本申请涉及一种具有无介质全息投影功能的AI交互机器人,其包括无介质全息投影单元,用于输入空中控制信号;控制器,与无介质全息投影单元相连接,用于接收空中控制信号,并向无介质全息投影单元输出空中输出内容。本申请具有使用户能够尽量无接触地触发交互机器人服务动作的效果。
技术研发人员:李升骅,沈煜,揭育诚,张兵
受保护的技术使用者:杭州飞像科技有限公司
技术研发日:20230920
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!