一种轻型无人机图像松枯病检测系统及方法
本发明涉及森林防治领域,具体涉及一种轻型无人机图像松枯病检测系统及方法。
背景技术:
1、由松材线虫(pwn)导致的松枯病(pwd)是一种致病性高,传播速度快,传播途径广的森林病害,严重破坏我国的松林资源。由于森林面积广阔,寻找高效、经济、准确的监测方法是当前森林病害防控领域的迫切需求。无人机凭借易于操作、适应性强、作业范围广、实时性强的特点在松材线虫病监测领域展现出的巨大应用潜力。
2、无人机高巡航姿态进行变色木检测的实时化面临以下几个问题:(1)在实际应用中,无人机飞行过快或者过高就会出现检测到的树木的病虫害目标过小,降低检测的精度。(2)由于虫害可能出现在不同尺度的图像上,需要对多尺度进行有效检测。(3)受限于无人机平台的计算资源、存储和通信能力,传统的基于rgb遥感图像的病树检测算法无法良好兼顾精度和速度的平衡。
技术实现思路
1、为解决上述背景中的技术问题,本发明提出一种基于改进yolov5的轻型无人机图像枯萎病检测方法lct-yolo,有效提升检测精度的同时,降低了模型参数量和浮点运算,减少运算推理时间,实现模型轻量化需求。
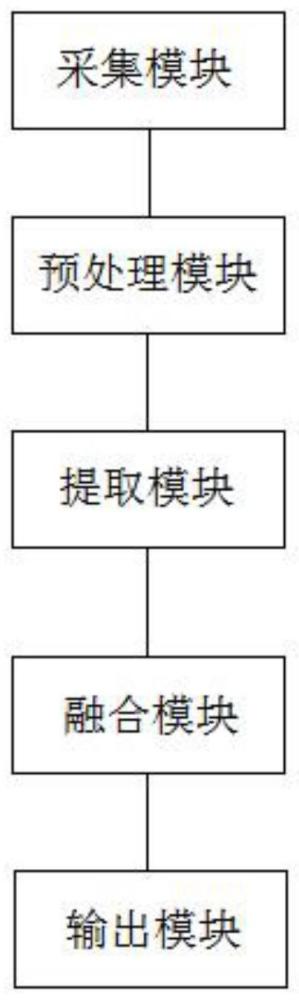
2、为实现上述目的,本发明提供了一种轻型无人机图像松枯病检测系统,包括:采集模块、预处理模块、提取模块、融合模块和输出模块;
3、所述采集模块利用无人机采集待检测区域的图像数据;
4、所述预处理模块用于对所述图像模块进行预处理,得到处理后数据;
5、所述提取模块用于对所述处理后数据进行特征提取,得到骨干特征;
6、所述融合模块用于对所述骨干特征进行特征融合,得到融合特征;
7、所述输出模块用于基于所述融合特征,输出边界框位置,完成松枯病的检测。
8、优选的,所述提取模块采用骨干特征提取网络对所述处理后户数进行特征提取,所述骨干特征提取网络由input stem和4个阶段组成,并在第3阶段和第4阶段中插入efficientvit构建块,作为efficientvit网络的核心,所述efficientvit构建块由轻量级多尺度注意力和mbconv组成。
9、优选的,所述融合模块采用基于内容感知的跨尺度双向融合网络cacsnet对所述骨干特征进行特征融合,所述跨尺度双向融合网络cacsnet利用特征图语义信息实现基于输入内容的自顶向下过程。
10、优选的,所述输出模块的工作流程包括:
11、基于所述融合特征,得到特征图;
12、基于所述特征图,得到初始锚框;
13、基于所述初始锚框,计算预测框得分;
14、基于所述预测框得分,输出所述边界框位置。
15、优选的,在输出所述边界框位置后,利用改进的eiou损失函数提高边界框的检测精度,改进的eiou损失函数计算公式如下:
16、
17、其中,liou表示重叠损失;ldis表示中心距离损失;lasp表示宽高损失;其中wc和hc是覆盖两个box的最小外接框的宽度和高度;ρ(b,bgt)表示预测框和真实框的中心点的欧式距离,ρ(w,wgt)表示预测框和真实框的宽的欧氏距离,ρ(h,hgt)表示预测框和真实框的宽的欧氏距离。
18、本发明还提供了一种轻型无人机图像松枯病检测方法,所述方法应用于上述系统,步骤包括:
19、利用无人机采集待检测区域的图像数据;
20、对所述图像模块进行预处理,得到处理后数据;
21、对所述处理后数据进行特征提取,得到骨干特征;
22、对所述骨干特征进行特征融合,得到融合特征;
23、基于所述融合特征,边界框位置,完成松枯病的检测。
24、优选的,进行所述特征提取的方法包括:采用骨干特征提取网络对所述处理后户数进行特征提取,所述骨干特征提取网络由input stem和4个阶段组成,并在第3阶段和第4阶段中插入efficientvit构建块,作为efficientvit网络的核心,所述efficientvit构建块由轻量级多尺度注意力和mbconv组成。
25、优选的,进行所述特征融合的方法包括:采用基于内容感知的跨尺度双向融合网络cacsnet对所述骨干特征进行特征融合,所述跨尺度双向融合网络cacsnet利用特征图语义信息实现基于输入内容的自顶向下过程。
26、与现有技术相比,本发明的有益效果如下:
27、本发明在大幅降低参数幅度的情况下,检测精度仍能超越众多目标检测器,较好地实现了模型精度和效率的平衡,有效降低模型嵌入部署难度。后续工作将进一步结合无人机的不同传感器数据实现pwd的早期实时监测,加大监测力度。
技术特征:
1.一种轻型无人机图像松枯病检测系统,其特征在于,包括:采集模块、预处理模块、提取模块、融合模块和输出模块;
2.根据权利要求1所述的轻型无人机图像松枯病检测系统,其特征在于,所述提取模块采用骨干特征提取网络对所述处理后户数进行特征提取,所述骨干特征提取网络由inputstem和4个阶段组成,并在第3阶段和第4阶段中插入efficientvit构建块,作为efficientvit网络的核心,所述efficientvit构建块由轻量级多尺度注意力和mbconv组成。
3.根据权利要求1所述的轻型无人机图像松枯病检测系统,其特征在于,所述融合模块采用基于内容感知的跨尺度双向融合网络cacsnet对所述骨干特征进行特征融合,所述跨尺度双向融合网络cacsnet利用特征图语义信息实现基于输入内容的自顶向下过程。
4.根据权利要求1所述的轻型无人机图像松枯病检测系统,其特征在于,所述输出模块的工作流程包括:
5.根据权利要求4所述的轻型无人机图像松枯病检测系统,其特征在于,在输出所述边界框位置后,利用改进的eiou损失函数提高边界框的检测精度,改进的eiou损失函数计算公式如下:
6.一种轻型无人机图像松枯病检测方法,所述方法应用于权利要求1-5任一项所述的系统,其特征在于,步骤包括:
7.根据权利要求6所述的轻型无人机图像松枯病检测方法,其特征在于,进行所述特征提取的方法包括:采用骨干特征提取网络对所述处理后户数进行特征提取,所述骨干特征提取网络由input stem和4个阶段组成,并在第3阶段和第4阶段中插入efficientvit构建块,作为efficientvit网络的核心,所述efficientvit构建块由轻量级多尺度注意力和mbconv组成。
8.根据权利要求6所述的轻型无人机图像松枯病检测方法,其特征在于,进行所述特征融合的方法包括:采用基于内容感知的跨尺度双向融合网络cacsnet对所述骨干特征进行特征融合,所述跨尺度双向融合网络cacsnet利用特征图语义信息实现基于输入内容的自顶向下过程。
技术总结
本发明公开了一种轻型无人机图像松枯病检测系统及方法,其中系统部分包括:采集模块、预处理模块、提取模块、融合模块和输出模块;采集模块利用无人机采集待检测区域的图像数据;预处理模块用于对图像模块进行预处理,得到处理后数据;提取模块用于对处理后数据进行特征提取,得到骨干特征;融合模块用于对骨干特征进行特征融合,得到融合特征;输出模块用于基于所述融合特征,输出边界框位置,完成松枯病的检测。本发明在大幅降低参数幅度的情况下,检测精度仍能超越众多目标检测器,较好地实现了模型精度和效率的平衡,有效降低模型嵌入部署难度。后续工作将进一步结合无人机的不同传感器数据实现PWD的早期实时监测,加大监测力度。
技术研发人员:王慧娟,袁全波,崔博琰,李建义
受保护的技术使用者:北华航天工业学院
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!