一种高精度深度图及其采集方法、采集设备
本发明属于计算机图像处理领域,特别涉及一种高精度深度图及其采集方法、采集设备。
背景技术:
1、深度图(depth map)也被称为距离影像(range image),是指将图像采集装置采集到的场景中各点的深度值(即场景中各点与图像采集装置之间的距离)作为像素值的图像。深度图是一种常用的图像表示方式,用于描述场景的三维结构。深度图能够直接反映景物可见表面的几何形状,利用它可以很方便地解决三维目标描述中的一系列问题。由于深度图是一种单通道图像,在目前应用最广泛的图像显示标准rgb下,深度图表现为一种灰度图像,其中每个像素点的强度值范围为0到255,共有256种取值。这个取值范围对于部分深度值范围跨度较大的应用场景,如城市景观图像、精密机械图像等,存在精度不够高的缺点。
2、公开号为“cn112258591a”的中国专利公开了一种多深度相机联合获取高精度深度图的方法,该方法通过使用高精度深度相机对若干低精度深度相机进行同时采集,利用两种相机重合部分对使用双边滤波器及高斯滤波器对低精度深度相机进行在线补偿,同时实时标定双边滤波器和高斯滤波器的参数,从而能够获取更高精度的深度图像。该发明的方法能够获得多幅高质量深度图像,降低了获取高精度深度图像的整体成本,但步骤繁琐,耗时较长,难以在提高深度图精度的同时保证实时性。
3、公开号为“cn112233191a”的中国专利公开了一种深度图彩色化方法,包括获得16位的深度图,根据深度值所映射的彩色空间计算每一个对应的rgb值从而形成彩色空间查找表。最后,根据彩色空间查找表将深度图转化为彩色的深度图。该发明通过彩色空间查找表将灰度表示的每个深度值映射为一种rgb颜色,实现深度值与彩色之间的线性映射从而快速实现深度图彩色化,其目的在于将深度图从灰度转换为彩色,提高深度图的可读性。因此所述发明仅使用了rgb颜色空间中的一部分,并没有充分利用r、g、b三个通道的信息表达能力,没有提高深度图的表达精度。
技术实现思路
1、本发明提供一种高精度深度图及其采集方法、采集设备,旨在解决现有深度图的深度值对于部分应用场景精度不够高的问题。
2、为解决上述技术问题,本发明提出了一种高精度深度图,所述高精度深度图采用rgb图像显示标准,将rgb图像的r、g、b 3个通道都用于表示深度,即将现有深度图的单通道表示扩展为3通道,每个像素有2563种取值。
3、此外,本发明还提出一种高精度深度图的采集方法,包括以下步骤:
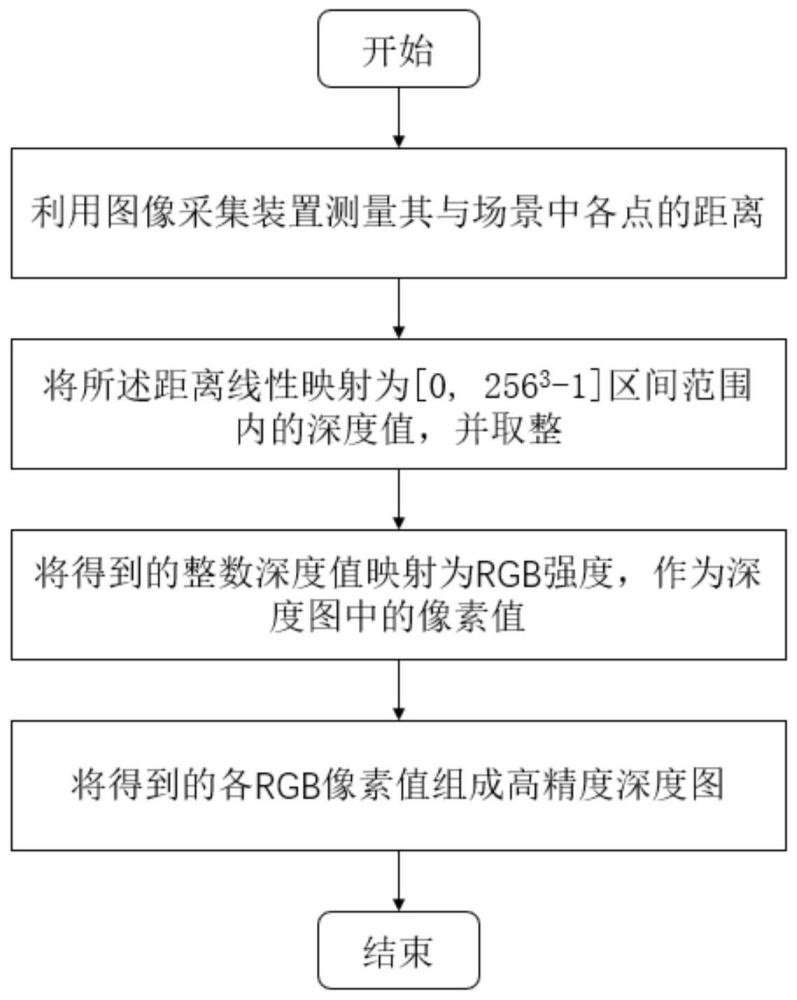
4、s1:利用图像采集装置测量其与场景中各点的距离。
5、s2:将所述距离线性映射为[0,2563-1]区间范围内的深度值,并取整。
6、s3:将得到的整数深度值映射为rgb强度,作为深度图中的像素值。
7、s4:将得到的各rgb像素值组成高精度深度图。
8、优选的,所述采集方法具体为:
9、a1:利用图像采集装置拍摄场景,设定测量深度范围为0.5m-1.5m,测量精度设为1mm,测量其与场景中各点之间的距离。
10、a2:将图像采集装置测量的距离值映射为[0,1000]区间内的整数深度值,所述整数深度值的计算公式具体为:
11、y=-1000x+1500
12、式中,所述y为映射后的整数深度值,所述x为图像采集装置测量的深度。
13、a3:将得到的整数深度值映射为rgb强度,作为深度图中的像素值,所述rgb强度的计算公式具体为:
14、
15、式中,所述r为像素值的r值,所述g为像素值的g值,所述b为像素值的b值,所述y为映射后的整数深度值。
16、a4:将得到的各rgb像素值组成高精度深度图。
17、相应的,本发明还提出一种高精度深度图的采集设备,所述设备包括图像采集装置、存储器与处理器,所述图像采集装置指具有深度感知功能的成像设备,所述图像采集装置用于采集图像,所述存储器用于存储图像与指令,所述处理器用于处理指令,所述设备用于执行以下步骤:
18、s1:利用图像采集装置测量其与场景中各点的距离。
19、s2:将所述距离线性映射为[0,2563-1]区间范围内的深度值,并取整。
20、s3:将得到的整数深度值映射为rgb强度,作为深度图中的像素值。
21、s4:将得到的各rgb像素值组成高精度深度图。
22、优选的,所述采集设备的采集方法具体为:
23、a1:利用图像采集装置拍摄场景,设定测量深度范围为0.5m-1.5m,测量精度设为1mm,测量其与场景中各点之间的距离。
24、a2:将图像采集装置测量的距离值映射为[0,1000]区间内的整数深度值,所述整数深度值的计算公式具体为:
25、y=-1000x+1500
26、式中,所述y为映射后的整数深度值,所述x为图像采集装置测量的深度。
27、a3:将得到的整数深度值映射为rgb强度,作为深度图中的像素值,所述rgb强度的计算公式具体为:
28、
29、式中,所述r为像素值的r值,所述g为像素值的g值,所述b为像素值的b值,所述y为映射后的整数深度值。
30、a4:将得到的各rgb像素值组成高精度深度图。
31、与现有技术相比,本发明具有以下技术效果:
32、1.本发明提供的高精度深度图尽管在图像编码上有所创新,但仍遵循rgb图像显示标准,方便应用于计算机图像处理、计算机视觉等领域,提供比传统深度图更加精准的图像表达及图像识别效果。
33、2.本发明提供的高精度深度图的采集方法可用于研发新一代的深度成像设备。例如现有的深度相机产品,其对深度的测量精度无法达到本发明部分实施例中提及的1mm,现有深度图的深度值范围对于此类深度相机而言是足够用的。然而,随着深度成像技术的发展,未来深度相机对深度的测量精度会越来越高,256个深度值所能提供的测量精度终会无法满足日益增长的需求。本发明提供的高精度深度图的采集方法可为未来深度相机的研发提供理论及技术上的支持。
技术特征:
1.一种高精度深度图,其特征在于,所述高精度深度图采用rgb图像显示标准,将rgb图像的r、g、b 3个通道都用于表示深度,即将现有深度图的单通道表示扩展为3通道,每个像素有2563种取值。
2.一种高精度深度图的采集方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的一种高精度深度图的采集方法,其特征在于,所述采集方法具体为:
4.一种高精度深度图的采集设备,其特征在于,所述设备包括图像采集装置、存储器与处理器,所述图像采集装置指具有深度感知功能的成像设备,所述图像采集装置用于采集图像,所述存储器用于存储图像与指令,所述处理器用于处理指令,所述设备用于执行以下步骤:
5.根据权利要求4所述的一种高精度深度图的采集设备,其特征在于,所述采集设备的采集方法具体为:
技术总结
本发明公开了一种高精度深度图,所述高精度深度图采用RGB图像显示标准,即将现有深度图的单通道表示扩展为3通道,每个像素有256<supgt;3</supgt;种取值。此外,本发明提出了一种高精度深度图的采集方法,包括:S1:利用图像采集装置测量其与场景中各点的距离;S2:将距离线性映射为[0,256<supgt;3</supgt;‑1]内的深度值并取整;S3:将整数深度值映射为RGB强度,作为深度图中的像素值;S4:将各RGB像素值组成高精度深度图。相应的,本发明还提出了一种高精度深度图的采集设备。本发明解决现有深度图的深度值对于部分应用场景精度不够高的问题,且本发明提供的高精度深度图遵循RGB图像显示标准,方便应用于计算机图像处理等领域,提供比传统深度图更加精准的图像表达及识别效果。
技术研发人员:董海韬,陈成军,庞泳,王金磊
受保护的技术使用者:青岛理工大学
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!