点云数据匹配方法、装置、电子设备及存储介质与流程
本申请涉及智能交通,尤其涉及一种点云数据匹配方法、装置、电子设备及存储介质。
背景技术:
1、在智能驾驶领域中,车道线检测作为一项关键技术,是保证车辆在一定范围内安全行驶的重要条件。车载激光扫描技术作为一项迅速发展的高新测绘手段,利用其获取数据速度快、更新周期低、数据精度高、主动式非接触测量等特点,可以快速、精确地收集城市道路的车道线数据。
2、但传统激光雷达视觉融合检测车道线的过程中,车道线的路边存在有杂物,容易将杂物当作边路车道线,从而影响匹配精度,因此亟需一种车道线匹配优化方法。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种点云数据匹配方法、装置、电子设备及存储介质,能够区分车道上最外侧的车道线和杂物,提高车道线的识别精度。
2、本申请第一方面提供一种点云数据匹配方法,包括:
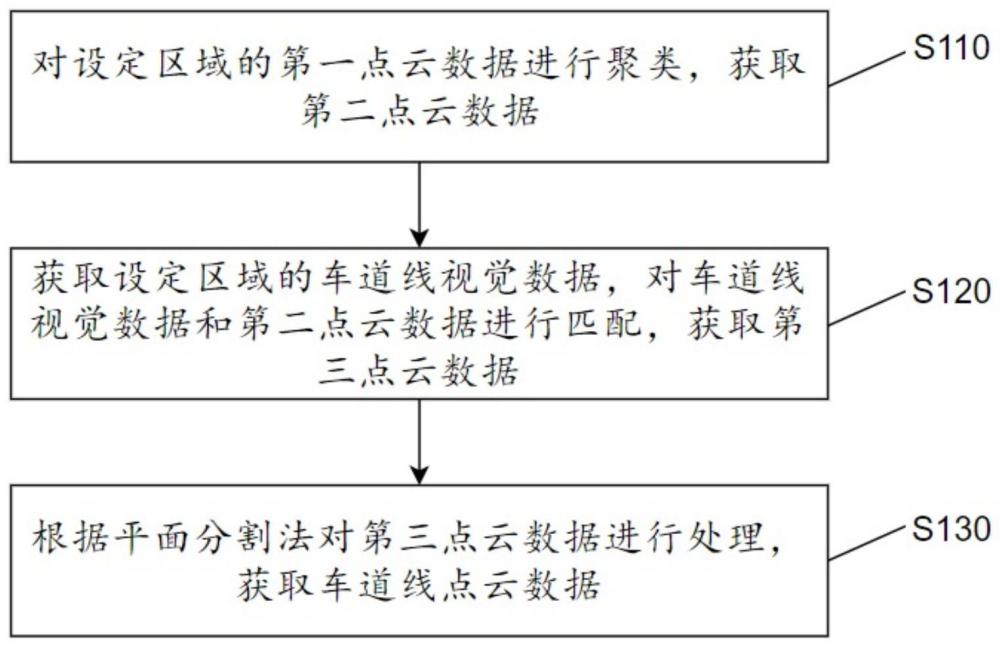
3、对设定区域的第一点云数据进行聚类,获取第二点云数据;
4、获取设定区域的车道线视觉数据,对所述车道线视觉数据和所述第二点云数据进行匹配,获取第三点云数据;
5、根据平面分割法对所述第三点云数据进行处理,获取车道线点云数据。
6、在其中一个实施例中,所述根据平面分割法对所述第三点云数据进行处理,获取车道线点云数据,包括:
7、根据平面分割法对所述第三点云数据进行预设高度和预设密度分割,获取所述车道线点云数据。
8、在其中一个实施例中,所述根据所述显式参数化曲面,获取约束平面,包括:
9、迭代调整所述约束平面方程的参数,确定拟合第三点云数据中预设比例的点云数据的约束平面方程的参数;
10、根据所述约束平面方程及参数,获得约束平面。
11、在其中一个实施例中,所述迭代调整所述约束平面方程的参数,确定拟合第三点云数据中预设比例的点云数据的约束平面方程的参数,包括:
12、通过迭代调整第三点云数据中点云数据与约束平面的设定距离阀值,迭代调整所述约束平面方程的参数,确定拟合第三点云数据中预设比例的点云数据的约束平面方程的参数。
13、在其中一个实施例中,所述根据平面分割法对所述第三点云数据进行处理,获取车道线点云数据,包括:
14、根据平面分割法对所述第三点云数据进行预设高度和预设密度分割,获取所述车道线点云数据。
15、在其中一个实施例中,所述对车辆周围设定区域的第一点云数据进行聚类,获取第二点云数据,包括:
16、对所述第一点云数据进行聚类,获得点云数据簇;
17、根据所述点云数据簇的长宽比,获取所述第二点云数据。
18、在其中一个实施例中,所述获取设定区域的车道线视觉数据,对所述车道线视觉数据和所述第二点云数据进行匹配,获取第三点云数据,包括:
19、获取设定区域的车道线视觉数据,根据车道线视觉数据获得车道线区域;
20、将所述第二点云数据与所述车道线区域进行匹配,获取所述车道线区域的第三点云数据。
21、在其中一个实施例中,所述根据平面分割法对所述第三点云数据进行处理,获取第一车道线点云数据之前,包括:
22、对所述第三点云数据进行纠偏,获取纠偏后的第三点云数据。
23、本申请第二方面提供一种点云数据匹配装置,包括:
24、聚类模块,用于对设定区域的第一点云数据进行聚类,获取第二点云数据;
25、匹配模块,用于获取设定区域的车道线视觉数据,对所述车道线视觉数据和所述第二点云数据进行匹配,获取第三点云数据;
26、处理模块,用于根据平面分割法对所述第三点云数据进行处理,获取车道线点云数据。
27、在其中一个实施例中,所述处理模块,还用于根据平面分割法对所述第三点云数据进行预设高度和预设密度分割,获取所述第一车道线点云数据。
28、本申请第三方面提供一种电子设备,包括:
29、处理器;以及
30、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
31、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
32、本申请提供的技术方案可以包括以下有益效果:
33、本申请实施例的点云数据匹配方法,通过对设定区域的第一点云数据进行聚类,获取第二点云数据;获取设定区域的车道线视觉数据,对车道线视觉数据和第二点云数据进行匹配,获取第三点云数据;根据平面分割法对第三点云数据进行处理,获取车道线点云数据,能够区分车道上最外侧的车道线和杂物,提高车道线的识别精度。
34、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种点云数据匹配方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据平面分割法对所述第三点云数据进行处理,获取车道线点云数据,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述显式参数化曲面,获取约束平面,包括:
4.根据权利要求3所述的方法,其特征在于,所述迭代调整所述约束平面方程的参数,确定拟合第三点云数据中预设比例的点云数据的约束平面方程的参数,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据平面分割法对所述第三点云数据进行处理,获取车道线点云数据,包括:
6.根据权利要求1所述的方法,其特征在于,所述对车辆周围设定区域的第一点云数据进行聚类,获取第二点云数据,包括:
7.根据权利要求1所述的方法,其特征在于,所述获取设定区域的车道线视觉数据,对所述车道线视觉数据和所述第二点云数据进行匹配,获取第三点云数据,包括:
8.根据权利要求1所述的方法,其特征在于,所述根据平面分割法对所述第三点云数据进行处理,获取第一车道线点云数据之前,包括:
9.一种点云数据匹配装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括:
11.一种计算机可读存储介质,其特征在于:其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-8中任一项所述的方法。
技术总结
本申请涉及一种点云数据匹配方法、装置、电子设备及存储介质。该方法包括:对设定区域的第一点云数据进行聚类,获取第二点云数据;获取设定区域的车道线视觉数据,对车道线视觉数据和第二点云数据进行匹配,获取第三点云数据;根据平面分割法对第三点云数据进行处理,获取车道线点云数据。本申请提供的方案,能够区分车道的车道线和杂物的点云数据,获取车道线点云数据,提高车道线的识别精度。
技术研发人员:郭杏荣,黄逸飞,贾双成,万如,李正旭
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!