应用于深度图像的sobel边缘检测电路
本发明涉及深度图像边缘检测电路,特别是涉及一种应用于深度图像的sobel边缘检测电路。
背景技术:
1、图像边缘反映了图像中强度的明显变化。边缘检测有助于识别图像中特定实体的边界。此外,有效的边缘提取结果还有助于特征提取和模式识别。因此,边缘检测在计算机视觉中非常重要。目前为止,普遍用软件实现基本边缘检测算法及其衍生变体。但应用于计算机的边缘检测算法具有移植性差,非实时处理等缺点,无法应用于可移动设备中。与软件实现相比,硬件实现提供了更快的替代方案,硬件方案中,一般使用图像传感器,如三维图像传感器。
2、三维图像传感器输出要使用两帧或者多帧图像进行深度计算,因此首先需要经过pc端的处理才能实现数据采集,且处理后的数据按照行或列的方式存储在pc端。此条件下,现有数据发送方法大多采用将整张图像数据存储于sdram,然后按照滤波窗口的移动方式进行数据传递;使用固化rom的方法存储图像;或采用fifo的存储方式进行滤波窗口的构建。但使用sdram的方法要额外占用存储时间,使用固化rom的方法局限于硬件的存储资源,使用fifo的方式要考虑数据和输入数据处理时间的关系。一种有效方式是采用shift_ram级联,这样只需按照算法单元时序选取合适数据发送方式,即可高效快速的完成深度图的边缘检测。
3、另外,传统sobel边缘检测方法很少考虑梯度计算和边缘比较时资源的占用问题,且在比较边缘时采用全图像固定阈值的方法,很容易造成边缘检测不准的问题。随着技术发展,基于电路的边缘检测方法得到了极大提升,但随着成像技术不断发展,高分辨率图像信号实时处理难度越来越大,精度要求越来越高。而现有sobel边缘提取算子准确率相对低,复杂度高,资源占用高,因此,如何有效地均衡算法的复杂度及提高算法的性能面临着更高的挑战。
技术实现思路
1、本发明的目的是为克服现有上述的技术中的缺陷,而提供一种应用于深度图像的sobel边缘检测电路,旨在解决现有sobel边缘提取算子准确率低,复杂度高,资源占用高的缺点。
2、为实现本发明的目的所采用的技术方案是:
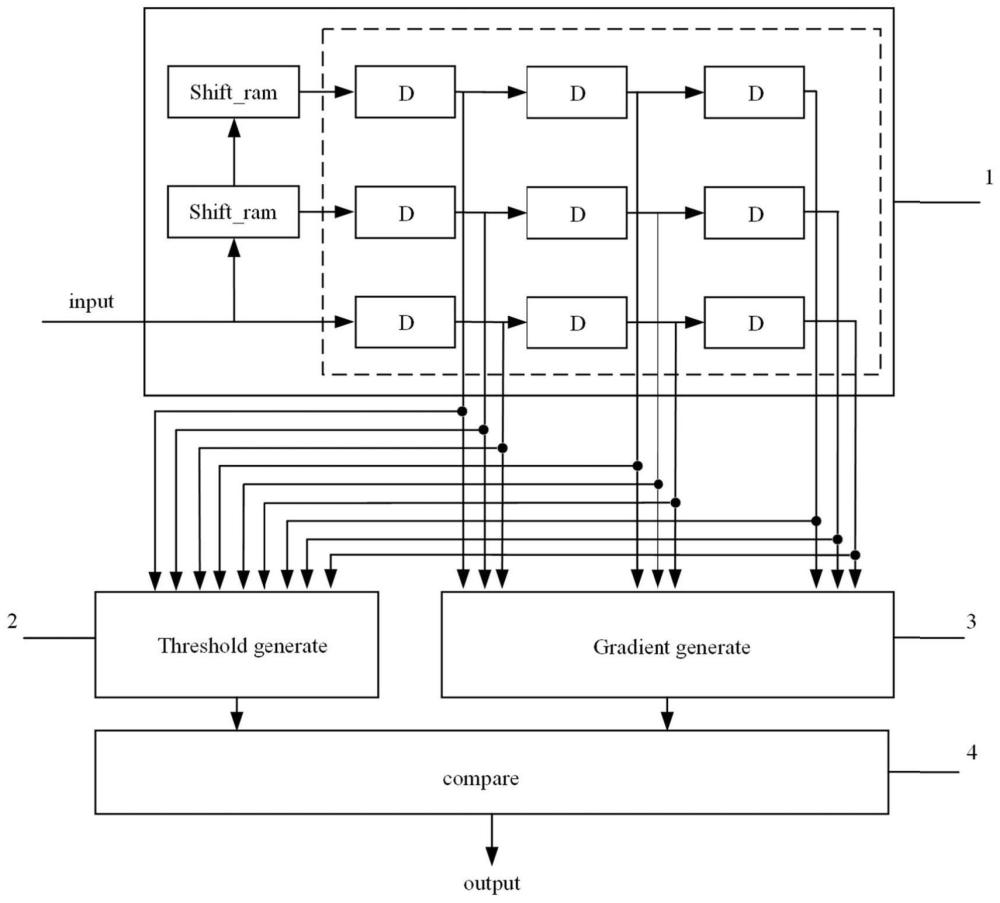
3、一种应用于深度图像的sobel边缘检测电路,包括:滤波窗口产生模块、阈值产生模块、梯度产生模块、比较输出模块;所述滤波窗口产生模块的输出端与所述阈值产生模块、梯度产生模块的输入端相连接,所述阈值产生模块与梯度产生模块的输出端连接所述比较输出模块的输入端;所述滤波窗口产生模块对串行输入的数据使用移位寄存器串行级联和d触发器同步延迟产生3×3的滤波窗口;所述阈值产生模块对所述滤波窗口产生模块产生的滤波窗口内容,并行计算每个像素4个方向梯度的绝对值求和并除以2,输出最终梯度至比较输出模块;所述梯度产生模块对所述滤波窗口产生模块产生的滤波窗口内容,计算每个滤波窗口内的自适应阈值输入到比较输出模块;所述比较输出模块对最终梯度和自适应阈值进行边缘比较,输出最终的判断结果。
4、其中,所述滤波窗口产生模块包括由多个d触发器并行级联单元,每个d触发器并行级联单元由三个d触发器级联,且第一级d触发器并行级联单元及第二级d触发器并行级联单元的输入端各自级联一个shift_ram模块,且两个shift_ram级联。
5、其中,所述阈值产生模块的输入端与多个d触发器并行级联单元的每个d触发器的输出端相连接,梯度产生模块的输入端与多个d触发器并行级联单元的每个d触发器的输出端相连接。
6、其中,所述阈值产生模块具有0°,45°,90°,135°4个方向的sobel掩膜,用于分别与3×3像素邻域p进行卷积,分别得到像素在四个方向上的梯度g0,g45,g90,g135,然后计算出最终梯度输出。
7、其中,所述最终梯度的表达式如下:
8、gtemp=0.5×(|g0|+|g45|+|g90|+|g135|);
9、式中,gtemp表示为最终梯度。
10、其中,所述阈值产生模块包括多个右移两位的移位寄存器、多个加法器以及进位控制的交换减法器;多个右移两位的移位寄存器与多个加法器相连接形成两个处理单元,每个处理单元的输出端连接进位控制的交换减法器的一个输入端,每个处理单元包括三个右移两位的移位寄存器以及三个加法器;第一加法器的两个输入端接两个右移两位的移位寄存器的输出端,第二加法器的两个输入端接另一个右移两位的移位寄存器的输出端,第三加法器的两个输入端接第一加法器及第二加法器的输出端。
11、其中,所述进位控制的交换减法器使用减法器产生的进位输出作为多路选择器的控制信号,通过进位标志位确定两个数值的大小关系,并使用多路选择器输出大的数值减去小的数值的差值,最后通过将4个方向梯度绝对值求和并除以2,得到最终梯度,包括两个减法器以及一个多路选择器,两个减法器的输出端各自与所述多路选择器的一个输入端相接,且一个减法器的进位标志位接口与所述多路选择器的进位标志位接口相连接。
12、其中,所述梯度产生模块包括多个右移四位的移位寄存器以及多个加法器,其中,包括多个第一处理单元以及一个第二处理单元,每个第一处理单元包括两个两个右移四位的移位寄存器以及一个一级加法器,所述加法器的两个输入端与两个右移四位的移位寄存器的输出端相接,其中,两个第一处理单元的两个一级加法器的输出端接入一个二级加法器的输入端,两个二级加法器的输出端与一个三级加法器的输入端相接,所述第二处理单元包括一个右移四位的移位寄存器,该第二处理单元的右移四位的移位寄存器的输出端级联三个加法器,所述第一处理单元的三级加法器的输出端及所述第二处理单元的三级加法器与四级加法器的输入端相接;所述四级加法器的输出端与一个右移四位的移位寄存器以及一个右移三位的移位寄存器的输入端相接,右移四位的移位寄存器以及右移三位的移位寄存器的输出端接接五级加法器的输入端。
13、其中,所述梯度产生模块包括9个右移四位的移位寄存器,分别对应9个像素,首先经过处理得到滤波窗口内所有像素深度值的1/16,获取窗口内像素之和,然后得到局部窗口内像素值总和的3/16,作为自适应阈值。
14、其中,所述比较输出模块对最终梯度和自适应阈值进行边缘比较,输出最终的判断结果,包括:
15、如果最终梯度大于自适应阈值,则最终输出结果gfinal为高电平,否则输出结果gfinal为低电平。
16、本发明的应用于深度图像的sobel边缘检测电路,能够解决传统sobel边缘检测模块资源占用大,边缘检测时阈值固定的问题,实现更精确的深度图像的边缘检测。
技术特征:
1.应用于深度图像的sobel边缘检测电路,其特征在于,包括滤波窗口产生模块、阈值产生模块、梯度产生模块、比较输出模块;所述滤波窗口产生模块的输出端与所述阈值产生模块、梯度产生模块的输入端相连接,所述阈值产生模块与梯度产生模块的输出端连接所述比较输出模块的输入端;所述滤波窗口产生模块对串行输入的数据使用移位寄存器串行级联和d触发器同步延迟产生3×3的滤波窗口;所述阈值产生模块对所述滤波窗口产生模块产生的滤波窗口内容,并行计算每个像素4个方向梯度的绝对值求和并除以2,输出最终梯度至比较输出模块;所述梯度产生模块对所述滤波窗口产生模块产生的滤波窗口内容,计算每个滤波窗口内的自适应阈值输入到比较输出模块;所述比较输出模块对最终梯度和自适应阈值进行边缘比较,输出最终的判断结果。
2.根据权利要求1所述应用于深度图像的sobel边缘检测电路,其特征在于,所述滤波窗口产生模块包括由多个d触发器并行级联单元,每个d触发器并行级联单元由三个d触发器级联,且第一级d触发器并行级联单元及第二级d触发器并行级联单元的输入端各自级联一个shift_ram模块,且两个shift_ram级联。
3.根据权利要求2所述应用于深度图像的sobel边缘检测电路,其特征在于,所述阈值产生模块的输入端与多个d触发器并行级联单元的每个d触发器的输出端相连接,梯度产生模块的输入端与多个d触发器并行级联单元的每个d触发器的输出端相连接。
4.根据权利要求1所述应用于深度图像的sobel边缘检测电路,其特征在于,所述阈值产生模块具有0°,45°,90°,135°4个方向的sobel掩膜,用于分别与3×3像素邻域p进行卷积,分别得到像素在四个方向上的梯度g0,g45,g90,g135,然后计算出最终梯度输出。
5.根据权利要求4所述应用于深度图像的sobel边缘检测电路,其特征在于,所述最终梯度的表达式如下:
6.根据权利要求1所述应用于深度图像的sobel边缘检测电路,其特征在于,所述阈值产生模块包括多个右移两位的移位寄存器、多个加法器以及进位控制的交换减法器;多个右移两位的移位寄存器与多个加法器相连接形成两个处理单元,每个处理单元的输出端连接进位控制的交换减法器的一个输入端,每个处理单元包括三个右移两位的移位寄存器以及三个加法器;第一加法器的两个输入端接两个右移两位的移位寄存器的输出端,第二加法器的两个输入端接另一个右移两位的移位寄存器的输出端,第三加法器的两个输入端接第一加法器及第二加法器的输出端。
7.根据权利要求6所述应用于深度图像的sobel边缘检测电路,其特征在于,所述进位控制的交换减法器使用减法器产生的进位输出作为多路选择器的控制信号,通过进位标志位确定两个数值的大小关系,并使用多路选择器输出大的数值减去小的数值的差值,最后通过将4个方向梯度绝对值求和并除以2,得到最终梯度,包括两个减法器以及一个多路选择器,两个减法器的输出端各自与所述多路选择器的一个输入端相接,且一个减法器的进位标志位接口与所述多路选择器的进位标志位接口相连接。
8.根据权利要求1所述应用于深度图像的sobel边缘检测电路,其特征在于,所述梯度产生模块包括多个右移四位的移位寄存器以及多个加法器,其中,包括多个第一处理单元以及一个第二处理单元,每个第一处理单元包括两个两个右移四位的移位寄存器以及一个一级加法器,所述加法器的两个输入端与两个右移四位的移位寄存器的输出端相接,其中,两个第一处理单元的两个一级加法器的输出端接入一个二级加法器的输入端,两个二级加法器的输出端与一个三级加法器的输入端相接,所述第二处理单元包括一个右移四位的移位寄存器,该第二处理单元的右移四位的移位寄存器的输出端级联三个加法器,所述第一处理单元的三级加法器的输出端及所述第二处理单元的三级加法器与四级加法器的输入端相接;所述四级加法器的输出端与一个右移四位的移位寄存器以及一个右移三位的移位寄存器的输入端相接,右移四位的移位寄存器以及右移三位的移位寄存器的输出端接接五级加法器的输入端。
9.根据权利要求8所述应用于深度图像的sobel边缘检测电路,其特征在于,所述梯度产生模块包括9个右移四位的移位寄存器,分别对应9个像素,首先经过处理得到滤波窗口内所有像素深度值的1/16,获取窗口内像素之和,然后得到局部窗口内像素值总和的3/16,作为自适应阈值。
10.根据权利要求1所述应用于深度图像的sobel边缘检测电路,其特征在于,所述比较输出模块对最终梯度和自适应阈值进行边缘比较,输出最终的判断结果,包括:
技术总结
本发明公开一种应用于深度图像的sobel边缘检测电路,包括:滤波窗口产生模块、阈值产生模块、梯度产生模块、比较输出模块;所述滤波窗口产生模块的输出端与所述阈值产生模块、梯度产生模块的输入端相连接,所述阈值产生模块与梯度产生模块的输出端连接所述比较输出模块的输入端。本发明的应用于深度图像的sobel边缘检测电路,能够解决传统sobel边缘检测模块资源占用大,边缘检测时阈值固定的问题,实现更精确的深度图像的边缘检测。
技术研发人员:徐江涛,刘子健,聂凯明,史再峰,高静
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!