一种绝缘子自主红外三维视觉检测方法和边缘智能装置与流程
本发明属于电力设备检测,具体涉及一种输电线路绝缘子自主红外三维视觉检测方法。
背景技术:
1、随着电力行业的快速发展,输电线路的安全运行越来越受到重视。绝缘子作为输电线路的重要组成部分,其状态直接影响到电力系统的安全稳定。
2、目前,绝缘子检测大多通过人工拍摄目标图像,然后再利用获取到的图像来提取目标温度。人工拍摄方式受限于定位精度、镜头转动角度和操作人员的经验等因素,人工拍摄图像容易造成绝缘子目标脱离镜头范围,难以将目标完整拍摄,造成检测数据易出现偏差和检测精准低的问题。在数据处理上,绝缘子检测装置在运行过程中产生大量的数据,包括红外图像和三维数据等,传统方式采用将数据上传到云端,导致效率不足、延迟性高,无法高效及时地处理和分析这些大规模数据,如何利用这些数据来提升检测的效率和准确性,是当前需要解决的挑战之一。
3、因此,有必要开发一种新型的绝缘子检测方法和边缘智能装置,以提高绝缘子检测的准确性、及时性、高效化。
技术实现思路
1、本发明的目的在于提供一种绝缘子自主红外三维视觉检测方法,以解决背景技术中提出的问题。
2、为实现上述目的,本发明提供了一种绝缘子自主红外三维视觉检测方法,包括以下步骤:
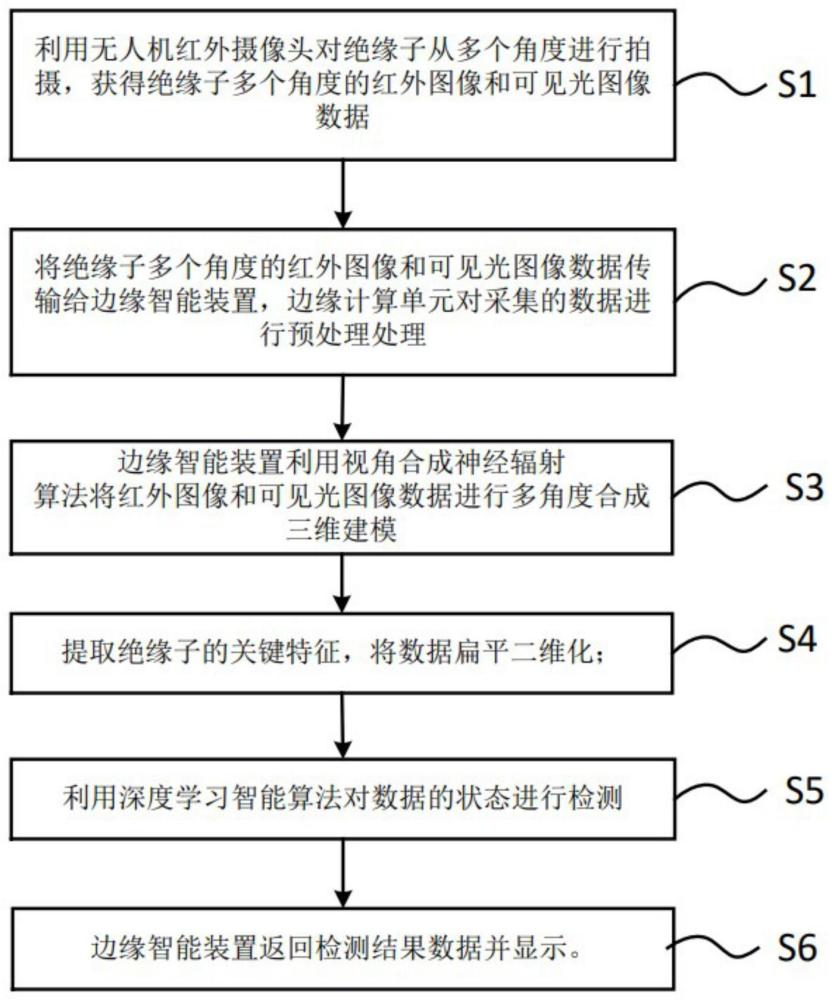
3、s1、使用无人机红外摄像头对绝缘子从多个角度进行拍摄,从而获得绝缘子多个角度的红外图像和可见光图像数据;所述无人机红外摄像头将绝缘子多个角度的红外图像和可见光图像数据实时传输给飞控设备;
4、s2、当需要进行检测时,边缘智能装置获取飞控设备中的红外图像和可见光图像数据,边缘计算单元对采集的数据进行预处理;
5、s3、所述边缘智能装置利用视角合成神经辐射算法对预处理后的多个角度的红外图像和可见光图像数据进行三维建模,得到绝缘子的三维模型;
6、s4、提取绝缘子三维模型的关键特征,并将提取出来的关键特征数据扁平二维化;
7、s5、利用劣化检测算法对扁平二维化后的关键特征数据的状态进行检测;
8、s6、边缘智能装置将检测到的返回检测结果数据并显示。
9、进一步的,所述步骤s1具体为:使用无人机红外摄像头对绝缘子进行拍摄,并将拍摄到的图像数据通过所述飞控设备传输至所述边缘智能装置,所述边缘智能装置接收到图像数据后,边缘计算单元利用人工智能识别修正算法对所述红外图像进行数据分析,进而推算出摄像头的转动角度,根据摄像头转动角度对无人机红外摄像头进行矫正,多角度循环上述步骤,进而获取绝缘子多个角度的红外图像和可见光图像数据。
10、进一步的,所述步骤s2具体包括:所述边缘智能装置和遥控器之间利用串口通信协议进行通信;所述边缘智能装置和遥控器之间拥有数据接口传输和接收算法。
11、进一步的,所述步骤s3具体包括:
12、s3.1、所述边缘智能装置利用视角合成神经辐射算法将红外图像和可见光图像中的整个场景编码为神经网络的参数;
13、s3.2、所述视角合成神经辐射的输入为五维向量输出为四维向量(r,g,b,σ);其中:
14、
15、s3.3、令红外摄像头位于o点,光线方向是d,则光线的方程为r(t)=o+td,其预测的像素颜色c(r)为:
16、
17、公式(2)中t(t)表示的是透射到t点的光线比例,σ(t)dt表示的是在t点附近的一个小邻域内会挡住多少比例的光线比例,二者相乘就是到达t点且在t点被拦下的光线比例,再乘上该点对应的颜色c(r(t))是这个点对光线最终颜色的贡献;积分区间[tn,tf]表示射线与介质的最近交点tnear和最远交点tfart。
18、进一步的,所述步骤s4具体包括:
19、s4.1、准备一组由红外摄像头拍摄的绝缘子2d图像,并解算出每张图像对应的红外摄像头位姿参数;
20、s4.2、对一张绝缘子2d图像,从红外摄像头发出一条光线,该光线穿过图像进入场景,光线与图像的交点p的像素值i(p)是基准颜色;从改光线上离散采样得到若干个采样点,将这些采样点的空间坐标(x,y,z)和步骤s4.1解算出的对应的红外摄像头的姿态组合起来作为神经网络的输入;
21、s4.3、通过神经网络预测光线上每个采样点的颜色和密度,将其作离散和,近似计算对应光线的像素值i`(p),将像素值i`(p)和光线颜色的真值i(p)比较计算误差和梯度;
22、s4.4、对同一目标绝缘子的多个角度红外图像的温度进行提取,与步骤s4.3进行校准,最终得出绝缘子检测结果和劣化位置。
23、本发明还提供一种输电线路绝缘子自主红外三维视觉检测的边缘智能装置,包括边缘计算单元、存储器、控制器和装置外壳体,所述边缘计算单元用于进行对采集的数据进行预处理和识别算法修正,所述存储器用于存储算法和处理程序,所述控制器用于进行计算和图像合成,所述边缘计算单元、所述存储器和所述控制器设置在所述装置外壳体内,所述边缘智能装置通过usb接口与所述飞控装置连接。
24、相比于现有技术,本发明具有以下有益效果:
25、(1)、本发明的一种利用人工智能技术的绝缘子自主红外三维视觉检测方法,结合红外成像技术、三维建模技术和人工智能算法,通过边缘计算装置对数据进行实时处理和分析,利用深度学习、图像识别和模式识别等人工智能技术,对绝缘子拍摄多张红外图像和可见光图像传输给边缘智能装置,在边缘智能装置中利用视角合成神经辐射生成三维形态数据建模,从而对绝缘子进行全面、准确的分析和评估。本发明通过在边缘智能装置上部署训练好的模型和算法,能够实现高效的数据处理、视觉对准修正和温度异常检测,进一步提高检测的精度和效率。
26、(2)、本发明的边缘智能装置具备存储数据存储、数据分析处理和识别检测功能,不需要将数据传输到云端进行数据操作,避免了数据到云端进行处理而产生的延迟和成本,该发明能够提升数据处理的及时性、保密性和高速化。
27、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种绝缘子自主红外三维视觉检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的绝缘子自主红外三维视觉检测方法,其特征在于,所述步骤s1具体为:使用无人机红外摄像头对绝缘子进行拍摄,并将拍摄到的图像数据通过所述飞控设备传输至所述边缘智能装置,所述边缘智能装置接收到图像数据后,边缘计算单元利用人工智能识别修正算法对所述红外图像进行数据分析,进而推算出摄像头的转动角度,根据摄像头转动角度对无人机红外摄像头进行矫正,多角度循环上述步骤,进而获取绝缘子多个角度的红外图像和可见光图像数据。
3.根据权利要求1所述的绝缘子自主红外三维视觉检测方法,其特征在于,所述步骤s2具体包括:所述边缘智能装置和遥控器之间利用串口通信协议进行通信;所述边缘智能装置和遥控器之间拥有数据接口传输和接收算法。
4.根据权利要求1所述的绝缘子自主红外三维视觉检测方法,其特征在于,所述步骤s3具体包括:
5.根据权利要求1所述的绝缘子自主红外三维视觉检测方法,其特征在于,所述步骤s4具体包括:
6.一种输电线路绝缘子自主红外三维视觉检测的边缘智能装置,其特征在于,包括边缘计算单元、存储器、控制器和装置外壳体,所述边缘计算单元用于进行对采集的数据进行预处理和识别算法修正,所述存储器用于存储算法和处理程序,所述控制器用于进行计算和图像合成,所述边缘计算单元、所述存储器和所述控制器设置在所述装置外壳体内,所述边缘智能装置通过usb接口与所述飞控装置连接。
技术总结
本发明公开了一种绝缘子自主红外三维视觉检测方法和边缘智能装置,检测方法结合红外成像技术、三维建模技术和人工智能算法,通过边缘计算装置对数据进行实时处理和分析,利用深度学习、图像识别和模式识别等人工智能技术,对绝缘子拍摄多张红外图像和可见光图像传输给边缘智能装置,在边缘智能装置中利用视角合成神经辐射生成三维形态数据建模,从而对绝缘子进行全面、准确的分析和评估。本发明通过在边缘智能装置上部署训练好的模型和算法,能够实现高效的数据处理、视觉对准修正和温度异常检测,进一步提高检测的精度和效率。边缘智能装置不需要将数据传输到云端进行数据操作,避免了数据到云端进行处理而产生的延迟和成本。
技术研发人员:尹骏刚,王勋,姚建刚
受保护的技术使用者:湖南湖大华龙电气与信息技术有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!