影像提取水面的方法、装置、设备及存储介质与流程
本发明涉及图像处理领域,具体而言,涉及一种影像提取水面的方法、装置、设备及存储介质。
背景技术:
1、随着技术的发展,遥感影像在水体提取方面的作用日渐明显,水体提取有利于对现有的水资源进行分析,能够快速准确地获取水体信息及其分布对于资源管理、规划发展、灾害快速评估等方面具有重要意义。
2、目前,基于像元分类的阈值法和基于目标分类的分类法是应用最多的两种水体信息自动提取方法。阈值法主要是基于地物的光谱特征,利用光谱知识构建各种分类模型和水体指数来进行水体的提取,通常用于中、高分辨率影像,但是针对低分辨率光学遥感影像分类法都是基于第三方软件进行分步处理,作业员需要对处理程序及算法非常熟悉,对作业员要求较高,并且数据要反复输入输出,大大降低了数据的生产效率。
技术实现思路
1、本发明的目的在于,针对上述现有技术中的不足,提供一种影像提取水面的方法、装置、设备及存储介质,以便实现对遥感影像水面的自动化提取,提高水面提取的工作效率。
2、为实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供了一种影像提取水面的方法,包括:
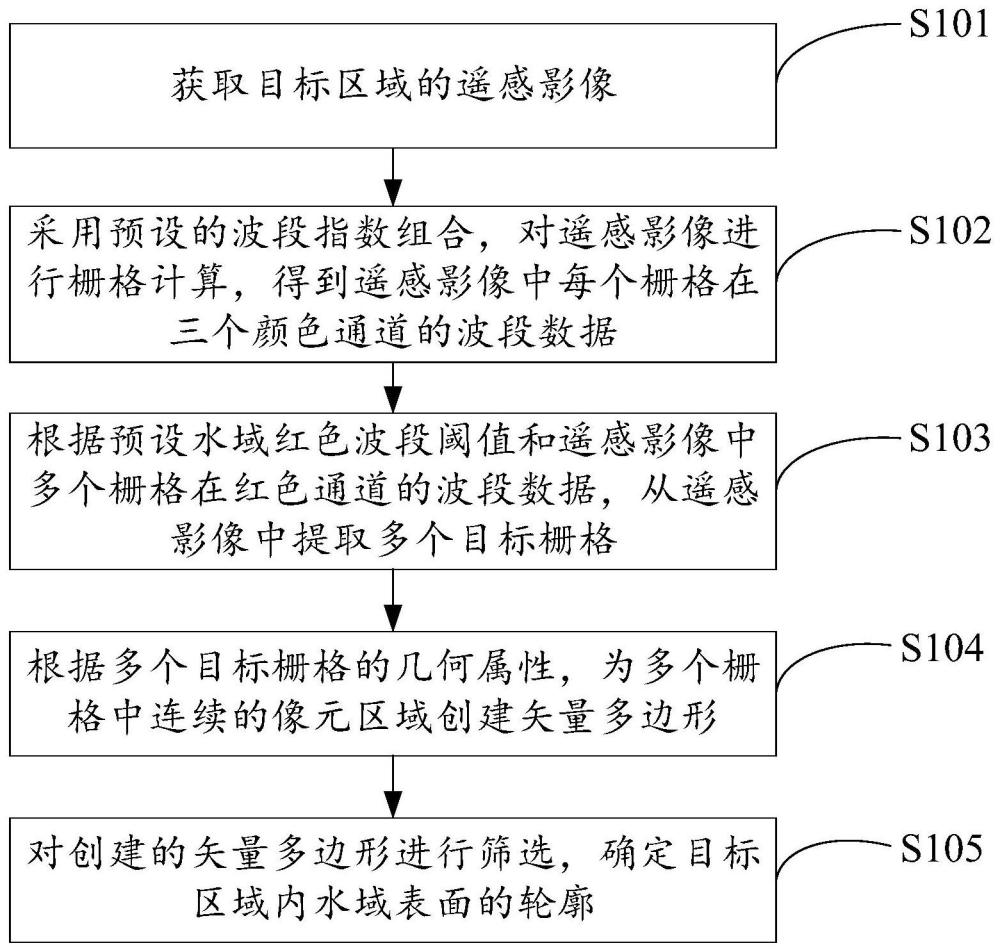
4、获取目标区域的遥感影像;
5、采用预设的波段指数组合,对所述遥感影像进行栅格计算,得到所述遥感影像中每个栅格在三个颜色通道的波段数据;
6、根据预设水域红色波段阈值和所述遥感影像中多个栅格在红色通道的波段数据,从所述遥感影像中提取多个目标栅格;
7、根据所述多个目标栅格的几何属性,为所述多个栅格中连续的像元区域创建矢量多边形;
8、对创建的矢量多边形进行筛选,确定所述目标区域内水域表面的轮廓。
9、在可选的实施方式中,所述采用预设的波段指数组合,对所述遥感影像进行栅格计算,得到所述遥感影像中每个栅格在三个颜色通道的波段数据之前,所述方法还包括:
10、对所述遥感影像的解译类型转换为预设位数的红绿蓝格式;
11、去除转换后的遥感影像中的预设透明度;
12、所述采用预设的波段指数组合,对所述遥感影像进行栅格计算,得到所述遥感影像中每个栅格在三个颜色通道的波段数据,包括:
13、采用所述波段指数组合,对去除所述预设透明度后的遥感影像进行栅格计算,得到所述每个栅格在所述三个颜色通道的波段数据。
14、在可选的实施方式中,所述根据预设水域红色波段阈值和所述遥感影像中多个栅格在红色通道的波段数据,从所述遥感影像中提取多个目标栅格,包括:
15、将所述多个栅格中所述红色通道的波段数据小于所述水域红色波段阈值的第一栅格的像素值设置为第一预设像素值;
16、将所述多个栅格中所述红色通道的波段数据大于或等于所述预设水域红色波段阈值的第二栅格的像素值设置为第二预设像素值;
17、确定多个所述第一栅格为所述多个目标栅格。
18、在可选的实施方式中,每个目标栅格的几何属性包括:所述每个目标栅格在预设红色通道的像素值、水域红色波段阈值,以及预设的最小图斑尺寸;
19、所述根据所述多个目标栅格的几何属性,为所述多个栅格中连续的像元区域创建矢量多边形,包括:
20、根据所述预设的最小图斑尺寸,从所述多个栅格中的连续像元区域中确定尺寸大于或等于所述预设的最小图斑尺寸的目标连续像元区域;
21、根据所述多个目标栅格在所述预设红色通道的像素值以及所述水域红色波段阈值,为所述目标连续像元区域,创建所述矢量多边形。
22、在可选的实施方式中,所述对创建的矢量多边形进行筛选,确定所述目标区域内水域表面的轮廓,包括:
23、根据所述三个颜色通道的水域阈值,对所述创建的矢量多边形进行筛选,得到目标多边形;
24、根据所述目标多边形,生成所述水域表面的轮廓。
25、在可选的实施方式中,所述根据所述目标多边形,生成所述水域表面的轮廓,包括:
26、根据预设的边界缓冲范围,对所述目标多边形的边界进行处理,得到所述水域表面的轮廓。
27、在可选的实施方式中,所述根据所述目标多边形,生成所述水域表面的轮廓,还包括:
28、若所述目标多边形内存在孔洞,则删除所述目标多边形中相邻多边形的公共边界以及所述目标多边形与所述孔洞之间的内边界,得到所述水域表面的目标轮廓。
29、第二方面,本申请实施例还提供了一种影像提取水面的装置,包括:
30、获取模块,用于获取目标区域的遥感影像;
31、计算模块,用于采用预设的波段指数组合,对所述遥感影像进行栅格计算,得到所述遥感影像中每个栅格在三个颜色通道的波段数据;
32、提取模块,用于根据预设水域红色波段阈值和所述遥感影像中多个栅格在红色通道的波段数据,从所述遥感影像中提取多个目标栅格;
33、创建模块,用于根据所述多个目标栅格的几何属性,为所述多个栅格中连续的像元区域创建矢量多边形;
34、确定模块,用于对创建的矢量多边形进行筛选,确定所述目标区域内水域表面的轮廓。
35、第三方面,本申请实施例还提供了一种电子设备,包括:处理器、存储介质和总线,所述存储介质存储有所述处理器可执行的程序指令,当电子设备运行时,所述处理器与所述存储介质之间通过总线通信,所述处理器执行所述程序指令,以执行上述第一方面任一所述的影像提取水面方法的步骤。
36、第四方面,本申请实施例还提供了一种计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行上述第一方面任一所述的影像提取水面方法的步骤。
37、本申请的有益效果是:
38、本申请提供一种影像提取水面的方法、装置、设备及存储介质,包括:获取目标区域的遥感影像,采用预设的波段指数组合,对遥感影像进行栅格计算,得到遥感影像中每个栅格在三个颜色通道的波段数据,并根据预设水域红色波段阈值和遥感影像中多个栅格在红色通道的波段数据,从遥感影像中提取多个目标栅格,然后根据多个目标栅格的几何属性,为多个栅格中连续的像元区域创建矢量多边形,并对创建的矢量多边形进行筛选,确定目标区域内水域表面的轮廓。本申请的方法,通过空间数据处理模型,实现遥感影像数据的数据预处理、多个目标栅格的提取、创建矢量多边形并确定水域表面的轮廓,从而实现低分辨率遥感影像水面的自动化提取,提高了水面提取的工作效率,节省大量的人力和物力。
技术特征:
1.一种影像提取水面的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述采用预设的波段指数组合,对所述遥感影像进行栅格计算,得到所述遥感影像中每个栅格在三个颜色通道的波段数据之前,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述根据预设水域红色波段阈值和所述遥感影像中多个栅格在红色通道的波段数据,从所述遥感影像中提取多个目标栅格,包括:
4.根据权利要求3所述的方法,其特征在于,每个目标栅格的几何属性包括:所述每个目标栅格在预设红色通道的像素值、水域红色波段阈值,以及预设的最小图斑尺寸;
5.根据权利要求1所述的方法,其特征在于,所述对创建的矢量多边形进行筛选,确定所述目标区域内水域表面的轮廓,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述目标多边形,生成所述水域表面的轮廓,包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述目标多边形,生成所述水域表面的轮廓,还包括:
8.一种影像提取水面的装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器、存储介质和总线,所述存储介质存储有所述处理器可执行的程序指令,当电子设备运行时,所述处理器与所述存储介质之间通过总线通信,所述处理器执行所述程序指令,以执行如权利要求1至7任一所述的影像提取水面方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至7任一所述的影像提取水面方法的步骤。
技术总结
本申请提供一种影像提取水面的方法、装置、设备及存储介质,涉及图像处理领域。该影像提取水面的方法包括:获取目标区域的遥感影像,采用预设的波段指数组合,对遥感影像进行栅格计算,得到遥感影像中每个栅格在三个颜色通道的波段数据,并根据预设水域红色波段阈值和遥感影像中多个栅格在红色通道的波段数据,从遥感影像中提取多个目标栅格,然后根据多个目标栅格的几何属性,为多个栅格中连续的像元区域创建矢量多边形,并对创建的矢量多边形进行筛选,确定目标区域内水域表面的轮廓。本申请的方法,通过空间数据处理模型,实现遥感影像数据的数据预处理、创建矢量多边形并确定水域表面的轮廓,提高水面提取的工作效率,节省大量的人力和物力。
技术研发人员:李兆辉,温泽华,王少运,张蓓,周刚刚,史建新,贾雨亭,王晓明,池少君,师帅,李姣姣,陈晨,马耐,刘祥
受保护的技术使用者:中煤航测遥感集团有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!