一种工地管理方法和系统与流程
本发明涉及工地管理技术,特别涉及一种工地管理方法和系统。
背景技术:
1、目前现有的工地管理方式仍然为人工管理为主,其中针对工地的建筑材料,安全、交通等需要项目经理、施工人员、质量管理人员等监管人员指挥管理,因此现有的工地管理方式需要较高的人力成本,对于工地相关的建筑材料的使用程度,以及相应的建筑工期识别管理等均需要人工记录预测,从而增加了工地管理的成本。
技术实现思路
1、本发明其中一个发明目的在于提供一种工地管理方法和系统,所述方法和系统利用三维扫描技术对工地的施工场景进行定时的三维建模,对三维建模的工地场景进行八叉树结构的三维重建操作,获取重建的每个八叉树立体结构的坐标信息,并根据所述八叉树立体结构的被模型的填充情况判断当前工地中不同建筑材料、建筑本体的位置和施工情况,并对工地建筑材料和施工情况进行有效地监督。
2、本发明另一个发明目的在于提供一种工地管理方法和系统,所述方法和系统在对工地进行八叉树的三维重建后,计算所述八叉树立体结构的边界体元,并对边界体元中得到三角片面,利用所述三角片面构建工地建筑材料的堆叠的三维表面结构,利用所述三角片面所在的边界体元判断当前工地中建筑材料的堆叠位置和堆叠范围,并根据所述八叉树的立体结构的实体元和边界体元得到建筑材料和建筑本体的体积量,结合实际工地周期管理可以有效地根据建筑材料和建筑本体的体积量判断当前建筑工期,实现对建筑工期自动化识别监管,减少人工监管的成本。
3、本发明另一个发明目的在于提供一种工地管理方法和系统,所述方法和系统对所述八叉树重构的三维立体结构得到的实体元和边界体元构成的堆叠块进行自动标记,并对所述标记的堆叠块进行堆叠块的场势计算,根据所述堆叠块的场势和堆叠块类配置工地的安全区域和路径,提高工地的安全管理效果。
4、为了实现至少一个上述发明目的,本发明进一步提供一种工地管理方法,所述方法包括:
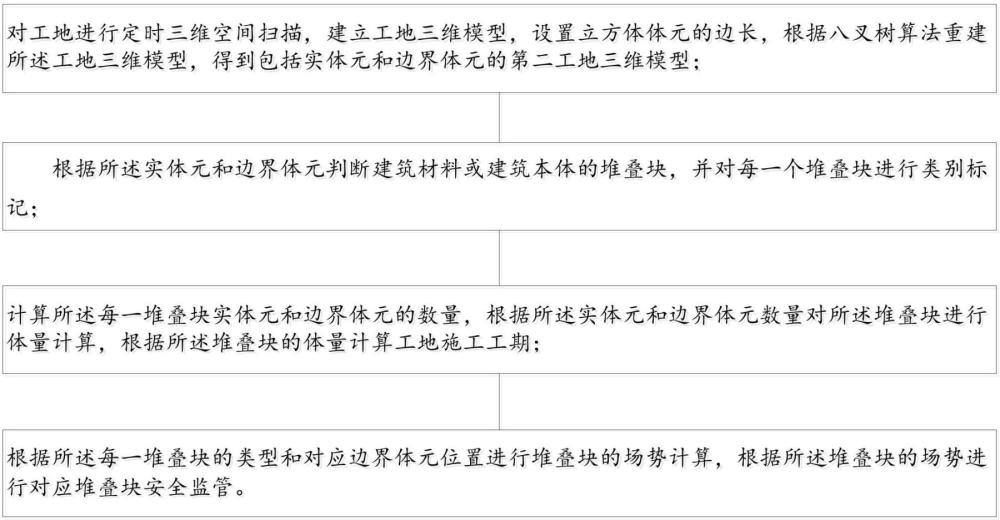
5、对工地进行定时三维空间扫描,建立工地三维模型,设置立方体体元的边长,根据八叉树算法重建所述工地三维模型,得到包括实体元和边界体元的第二工地三维模型;
6、根据所述实体元和边界体元判断建筑材料或建筑本体的堆叠块,并对每一个堆叠块进行类别标记;
7、计算所述每一堆叠块实体元和边界体元的数量,根据所述实体元和边界体元数量对所述堆叠块进行体量计算,根据所述堆叠块的体量计算工地施工工期;
8、根据所述每一堆叠块的类型和对应边界体元位置进行堆叠块的场势计算,根据所述堆叠块的场势进行对应堆叠块安全监管。
9、根据本发明其中一个较佳实施例,对所述工地三维模型进行重建的方法包括:设置工地三维模型的原点,根据所述原点建立三维直角坐标系,根据预设的体元边长将工地三维模型整体拆分为以体元边长为大小的小立方体结构,所述小立方体结构面面贴合连接,每一小立方体结构为一个体元;其中重建的所述体元包括空体元、实体元和边界体元。
10、根据本发明另一个较佳实施例,获取所述重建的第二工地三维模型中的实体元和边界体元的坐标数据,所述坐标数据为每一实体元和边界体元的中心点坐标,根据所述实体元和边界体元的坐标数据判断在所述第二工地三维模型中的堆叠块,并根据实际工地中的堆叠块的建筑材料类型或建筑本体进行类别标记,定期计算每一堆叠块的实体元和边界体元构成的空间体量变化,根据所述对应堆叠块空间体量变化判断当前对应工期效率和进度。
11、根据本发明另一个较佳实施例,所述每一堆叠块的体元范围判断方法包括:获取所述第二工地三维模型中的实体元和边界体元的中心点坐标数据,设置堆叠块体元限值距离s,任意连续相邻的实体元和边界体元归类到同一堆叠块中;对于非连续相邻的实体元或边界体元,获取当前非连续相邻的第一实体元中心坐标,计算所述第一实体元和其它任意非连续相邻的第二实体元中心点坐标或第二边界体元中心点坐标之间的距离l1,当所述距离l1小于等于所述堆叠块体元限值距离s,则将对应的第二边界体元或第二实体元归类到所述第一实体元中作为同一堆叠块;或者获取当前非连续相邻的第一边界体元中心点坐标,计算所述第一边界体元中心点坐标和其它任意非连续相邻的第二实体元中心点坐标或第二边界体元中心点坐标之间的距离l2,当所述距离l2小于等于所述堆叠块体元限值距离s,则将对应的第二实体元或第二边界体元归类到所述第一边界体元中作为同一堆叠块。
12、根据本发明另一个较佳实施例,在获取到所述同一堆叠块的所有实体元和边界体元后,所述对应堆叠块体量的计算方法包括:定义所述实体元边长为x,分别获取当前时间t时建模得到的对应堆叠块的实体元的数目c1和边界体元的数目c2,此时所述对应堆叠块体量ct=c1*x3+σc2*x3,其中σ为预先设置的边界比例系数,t表示重建模时间,预设每一施工工期f的所对应的堆叠体量范围,若对应堆叠块体量ct在对应的每一施工工期f堆叠体量范围,则将当前堆叠块所对应的施工工期为f。
13、根据本发明另一个较佳实施例,当获取到对应堆叠块的每一边界体元和实体元的坐标后,获取在三维直角坐标系中z轴方向坐标值最大的第三边界体元,根据所述第三边界体元z轴坐标值计算对应堆叠块堆叠高度h,分别设置非建筑物本体的对应堆叠块的最大堆叠高度hmax,当时间t时建立的对应堆叠块的堆叠高度h大于所述最大堆叠高度hmax,则发出安全告警信息,用于后续安全处理。
14、根据本发明另一个较佳实施例,所述方法包括获取对应堆叠块的每一边界体元和实体元的坐标后,计算对应堆叠块堆叠范围内每一个最上方边界体元的坐标数据,定义所述对应堆叠块堆叠范围内每一个最上方边界体元为第四边界体元,获取所述第四边界体元z轴方向上坐标值,根据所述第四边界体元z轴方向上坐标值进行每一堆叠块的场势计算,根据所述场势计算结果进行安全区域或可通行路径判断。
15、根据本发明另一个较佳实施例,所述每一堆叠块的场势计算公式为:,其中pt表示t时间重建模后堆叠块p,u()为对应堆叠块对应势能值,所述势能值和当前堆叠位置的高度相关,xt,p和yt,p分别为在t时间重建模后对应堆叠块p在x轴和y轴堆叠范围内的坐标值;其中β为超参数,为比重函数,e为自然对数,其中所述超参数β用于控制场势的安全风险,不同堆叠类型超参数不同,通过所述场势计算公式得到每一堆叠块可能出现场势运动的安全风险。
16、为了实现至少一个上述发明目的,本发明进一步提供一种工地管理系统,所述系统执行上述一种工地管理方法。
17、本发明进一步提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行以实现上述一种工地管理方法。
技术特征:
1.一种工地管理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种工地管理方法,其特征在于,对所述工地三维模型进行重建的方法包括:设置工地三维模型的原点,根据所述原点建立三维直角坐标系,根据预设的体元边长将工地三维模型整体拆分为以体元边长为大小的小立方体结构,所述小立方体结构面面贴合连接,每一小立方体结构为一个体元;其中重建的所述体元包括空体元、实体元和边界体元。
3.根据权利要求1所述的一种工地管理方法,其特征在于,获取所述重建的第二工地三维模型中的实体元和边界体元的坐标数据,所述坐标数据为每一实体元和边界体元的中心点坐标,根据所述实体元和边界体元的坐标数据判断在所述第二工地三维模型中的堆叠块,并根据实际工地中的堆叠块的建筑材料类型或建筑本体进行类别标记,定期计算每一堆叠块的实体元和边界体元构成的空间体量变化,根据所述对应堆叠块空间体量变化判断当前对应工期效率和进度。
4.根据权利要求3所述的一种工地管理方法,其特征在于,所述每一堆叠块的体元范围判断方法包括:获取所述第二工地三维模型中的实体元和边界体元的中心点坐标数据,设置堆叠块体元限值距离s,任意连续相邻的实体元和边界体元归类到同一堆叠块中;对于非连续相邻的实体元或边界体元,则获取当前非连续相邻的第一实体元中心坐标,计算所述第一实体元和其它任意非连续相邻的第二实体元中心点坐标或第二边界体元中心点坐标之间的距离l1,当所述距离l1小于等于所述堆叠块体元限值距离s,则将对应的第二边界体元或第二实体元归类到所述第一实体元中作为同一堆叠块;或者获取当前非连续相邻的第一边界体元中心点坐标,计算所述第一边界体元中心点坐标和其它任意非连续相邻的第二实体元中心点坐标或第二边界体元中心点坐标之间的距离l2,当所述距离l2小于等于所述堆叠块体元限值距离s,则将对应的第二实体元或第二边界体元归类到所述第一边界体元中作为同一堆叠块。
5.根据权利要求4所述的一种工地管理方法,其特征在于,在获取到所述同一堆叠块的所有实体元和边界体元后,所述对应堆叠块体量的计算方法包括:定义所述实体元边长为x,分别获取当前时间t时重建模得到的对应堆叠块的实体元的数目c1和边界体元的数目c2,此时所述对应堆叠块体量ct=c1*x3+σc2*x3,其中σ为预先设置的边界比例系数,t表示重建模时间,预设每一施工工期f的所对应的堆叠体量范围,若对应堆叠块体量ct在对应的每一施工工期f堆叠体量范围,则将当前堆叠块所对应的施工工期为f。
6.根据权利要求1所述的一种工地管理方法,其特征在于,当获取到对应堆叠块的每一边界体元和实体元的坐标后,获取在三维直角坐标系中z轴方向坐标值最大的第三边界体元,根据所述第三边界体元z轴坐标值计算对应堆叠块堆叠高度h,分别设置非建筑物本体的对应堆叠块的最大堆叠高度hmax,当时间t时建立的对应堆叠块的堆叠高度h大于所述最大堆叠高度hmax,则发出安全告警信息,用于后续安全处理。
7.根据权利要求1所述的一种工地管理方法,其特征在于,所述方法包括获取对应堆叠块的每一边界体元和实体元的坐标后,计算对应堆叠块堆叠范围内每一个最上方边界体元的坐标数据,定义所述对应堆叠块堆叠范围内每一个最上方边界体元为第四边界体元,获取所述第四边界体元z轴方向上坐标值,根据所述第四边界体元z轴方向上坐标值进行每一堆叠块的场势计算,根据所述场势计算结果进行安全区域或可通行路径判断。
8.根据权利要求7所述的一种工地管理方法,其特征在于,所述每一堆叠块的场势计算公式为:,其中pt表示t时间重建模后堆叠块p,u()为对应堆叠块对应势能值,所述势能值和当前堆叠范围的高度相关,xt,p和yt,p分别为在t时间重建模后对应堆叠块p在x轴和y轴堆叠范围内的坐标值;其中β为超参数,为比重函数,e为自然对数,其中所述超参数β用于控制场势的安全风险,不同堆叠类型超参数不同,通过所述场势计算公式得到每一堆叠块可能出现场势运动的安全风险。
9.一种工地管理系统,其特征在于,所述系统执行上述权利要求1-8中任意一项所述的一种工地管理方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行以实现上述权利要求1-8中任意一项所述的一种工地管理方法。
技术总结
本发明提供了一种工地管理方法和系统,所述方法包括:对工地进行定时三维空间扫描,建立工地三维模型,设置立方体体元的边长,根据八叉树算法重建所述工地三维模型,得到包括实体元和边界体元的第二工地三维模型;根据所述实体元和边界体元判断建筑材料或建筑本体的堆叠块,并对每一个堆叠块进行类别标记;计算所述每一堆叠块实体元和边界体元的数量,根据所述实体元和边界体元数量对所述堆叠块进行体量计算,根据所述堆叠块的体量计算工地施工工期;根据所述每一堆叠块的类型和对应边界体元位置进行堆叠块的场势计算,根据所述堆叠块的场势进行对应堆叠块安全监管。
技术研发人员:段玉洁,金睿,陆瑶,马锦涛,冯春生,尹井鑫,薛倩倩
受保护的技术使用者:浙江建投数字技术有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!