一种惯性导航系统健康状态预测方法、系统、设备及介质
本发明涉及惯性导航系统健康管理领域,特别是涉及一种惯性导航系统健康状态预测方法、系统、设备及介质。
背景技术:
1、惯性导航系统作为控制系统的关键部件,在复杂动态系统中起到精确定位和定姿的作用,是系统组成的高精密器件之一。在航天飞机、运载火箭等领域发挥着至关重要的作用。对惯性导航系统的健康状态进行预测的目的在于综合运用历史信息和测试数据,评价系统的整体性能和状态。这种评估具有重要意义,可以有效评估系统的性能和态势,识别系统的潜在风险,并以低成本实现故障诊断和预防性维护。
2、然而,在惯性导航系统的实际应用中,受限于测试次数,惯性导航系统可获取的高价值健康状态样本缺乏。同时,由于测试时间间隔非周期性,无法得到周期性连续的惯性导航系统健康状态数据。在数据量小、缺乏连续检测数据的情况下,评估误差会随时间推移而不断积累,可能会导致对设备的健康状态和潜在问题评估准确度下降或者不足的情况出现。以上问题的存在可能对设备的可靠性、性能和维护策略产生负面影响。
3、在对惯性导航系统进行健康状态预测时,等间隔检测的数据具有更好的连续性,在采样频率上具有稳定性。这种连续性与稳定性有助于减少数据的噪声和不确定性,提高预测的稳定性和准确性,从而建立更准确的模型,提高预测效果。因此,为了更准确地评估设备的健康状态,有必要考虑对非周期性的测试数据进行周期化处理来弥补测试数据有限和时间间隔不确定性带来的局限性。
技术实现思路
1、基于此,本发明实施例提供一种惯性导航系统健康状态预测方法、系统、设备及介质,以解决测试数据有限和时间间隔不确定性带来的局限性,从而提高惯性导航系统健康状态预测的准确性。
2、为实现上述目的,本发明实施例提供了如下方案。
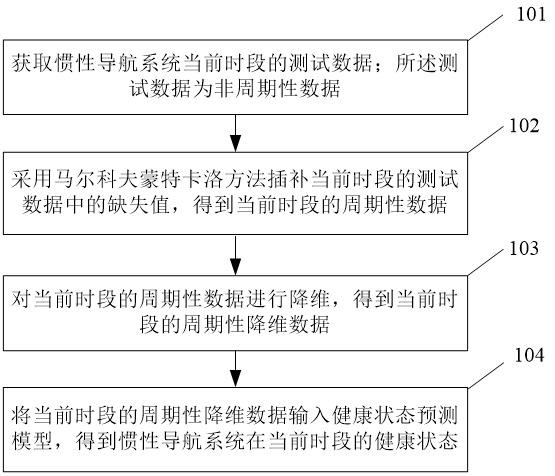
3、一种惯性导航系统健康状态预测方法,包括:获取惯性导航系统当前时段的测试数据;所述测试数据为非周期性数据;采用马尔科夫蒙特卡洛方法插补当前时段的测试数据中的缺失值,得到当前时段的周期性数据;对当前时段的周期性数据进行降维,得到当前时段的周期性降维数据;将当前时段的周期性降维数据输入健康状态预测模型,得到惯性导航系统在当前时段的健康状态;其中,所述健康状态预测模型是基于机器学习的方法构建的。
4、可选地,所述健康状态预测模型的确定方法,包括:获取惯性导航系统历史时段的测试数据和对应的健康状态;采用马尔科夫蒙特卡洛方法插补历史时段的测试数据中的缺失值,得到历史时段的周期性数据;对历史时段的周期性数据进行降维,得到历史时段的周期性降维数据;根据历史时段的周期性降维数据和对应的健康状态构建训练数据;采用所述训练数据对支持向量机进行训练,并将训练好的支持向量机确定为所述健康状态预测模型。
5、可选地,采用马尔科夫蒙特卡洛方法插补当前时段的测试数据中的缺失值,得到当前时段的周期性数据,具体包括:采用梅特罗波利斯-黑斯廷斯算法和估计潜在规模缩减因子的方法对当前时段的测试数据中的任一特征插补缺失值,得到当前时段各个特征的周期性数据;所述测试数据中的一种参数作为一个特征;将当前时段所有特征的周期性数据确定为当前时段最终的周期性数据。
6、可选地,采用梅特罗波利斯-黑斯廷斯算法和估计潜在规模缩减因子的方法对当前时段的测试数据中的任一特征插补缺失值,得到当前时段各个特征的周期性数据,具体包括:对于当前时段的测试数据中的任一特征,插补缺失值的过程包括:按照时间序列构建所述特征的服从平稳分布的初始马尔科夫链;根据建议分布和平稳分布确定状态转移的接受概率;根据所述接受概率生成缺失位置的随机样本;将所述随机样本插入所述初始马尔科夫链的缺失位置,生成马尔科夫新链;采用估计潜在规模缩减因子的方法判断所述马尔科夫新链是否收敛;若收敛,则将所述随机样本插入当前时段的测试数据中,得到当前时段所述特征的周期性数据;若不收敛,则重新构建所述特征的服从平稳分布的初始马尔科夫链,直至生成收敛的马尔科夫新链。
7、可选地,对当前时段的周期性数据进行降维,得到当前时段的周期性降维数据,具体包括:采用主成分分析方法对当前时段的周期性数据进行降维,得到当前时段的周期性降维数据。
8、可选地,所述测试数据包括:四类参数集,分别为加速度计的零次项漂移系数集、加速度计的一次项漂移系数集、陀螺仪的零次项漂移系数集和陀螺仪的一次项漂移系数集;每类参数集包括不同方向轴上对应的漂移系数;一个方向轴上对应的漂移系数作为一种参数。
9、本发明还提供了一种惯性导航系统健康状态预测系统,包括:数据获取模块,用于获取惯性导航系统当前时段的测试数据;所述测试数据为非周期性数据;插补模块,用于采用马尔科夫蒙特卡洛方法插补当前时段的测试数据中的缺失值,得到当前时段的周期性数据;降维模块,用于对当前时段的周期性数据进行降维,得到当前时段的周期性降维数据;健康状态预测模块,用于将当前时段的周期性降维数据输入健康状态预测模型,得到惯性导航系统在当前时段的健康状态;其中,所述健康状态预测模型是基于机器学习的方法构建的。
10、本发明还提供了一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的惯性导航系统健康状态预测方法。
11、本发明还提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的惯性导航系统健康状态预测方法。
12、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明实施例采用马尔科夫蒙特卡洛方法将惯性导航系统中非周期性的测试数据,通过插补缺失值的方式转化为周期性数据,基于周期性数据,结合数据降维方法和基于机器学习的方法构建的健康状态预测模型,实现惯性导航系统健康状态的预测,解决了测试数据有限和时间间隔不确定性带来的局限性,可以提高惯性导航系统健康状态预测的准确性,从而积极影响设备的可靠性、性能和维护策略。
技术特征:
1.一种惯性导航系统健康状态预测方法,其特征在于,包括:
2.根据权利要求1所述的惯性导航系统健康状态预测方法,其特征在于,所述健康状态预测模型的确定方法,包括:
3.根据权利要求1所述的惯性导航系统健康状态预测方法,其特征在于,采用梅特罗波利斯-黑斯廷斯算法和估计潜在规模缩减因子的方法对当前时段的测试数据中的任一特征插补缺失值,得到当前时段各个特征的周期性数据,具体包括:
4.根据权利要求1所述的惯性导航系统健康状态预测方法,其特征在于,对当前时段的周期性数据进行降维,得到当前时段的周期性降维数据,具体包括:
5.根据权利要求1所述的惯性导航系统健康状态预测方法,其特征在于,所述测试数据包括:四类参数集,分别为加速度计的零次项漂移系数集、加速度计的一次项漂移系数集、陀螺仪的零次项漂移系数集和陀螺仪的一次项漂移系数集;每类参数集包括不同方向轴上对应的漂移系数;一个方向轴上对应的漂移系数作为一种参数。
6.一种惯性导航系统健康状态预测系统,其特征在于,包括:
7.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行权利要求1至5中任一项所述的惯性导航系统健康状态预测方法。
8.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至5中任一项所述的惯性导航系统健康状态预测方法。
技术总结
本发明公开了一种惯性导航系统健康状态预测方法、系统、设备及介质,涉及惯性导航系统健康管理领域,所述方法包括:获取惯性导航系统当前时段的测试数据;测试数据为非周期性数据;采用马尔科夫蒙特卡洛方法插补当前时段的测试数据中的缺失值,得到当前时段的周期性数据;对当前时段的周期性数据进行降维,得到当前时段的周期性降维数据;将当前时段的周期性降维数据输入健康状态预测模型,得到惯性导航系统在当前时段的健康状态;其中,健康状态预测模型是基于机器学习的方法构建的。本发明能提高惯性导航系统健康状态预测的准确性。
技术研发人员:周志杰,王子文,冯志超,孔祥玉,胡昌华,宁鹏云
受保护的技术使用者:中国人民解放军火箭军工程大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!