虚拟机器人的实例处理方法、实例处理装置及存储介质与流程
本发明涉及数据处理领域,尤其涉及虚拟机器人的实例处理方法、实例处理装置及存储介质。
背景技术:
1、当需要获取或查询多个具有不同参数的对象时,可以通过实例获取参数的方式来实现。通过实例获取参数的方式,能够避免在类定义中添加大量的参数,使代码更加简洁和易于维护。此外,通过实例获取参数还可以提高代码的可读性和可扩展性,使得代码更加易于理解和维护。
2、在相关技术中,通常采用固定的模板进行实例创建。在执行过程中,实例需要分解并下发到不同的模块或服务当中,而不同模块或服务之间存在差异,且模板的配置是完全相同的,在创建模板后还需要手动配置各个执行方对应的执行实例,导致实例的处理效率低。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种虚拟机器人的实例处理方法、实例处理装置及存储介质,解决现有技术中实例的处理效率低的问题。
2、为实现上述目的,本发明提供一种虚拟机器人的实例处理方法,所述方法包括以下步骤:
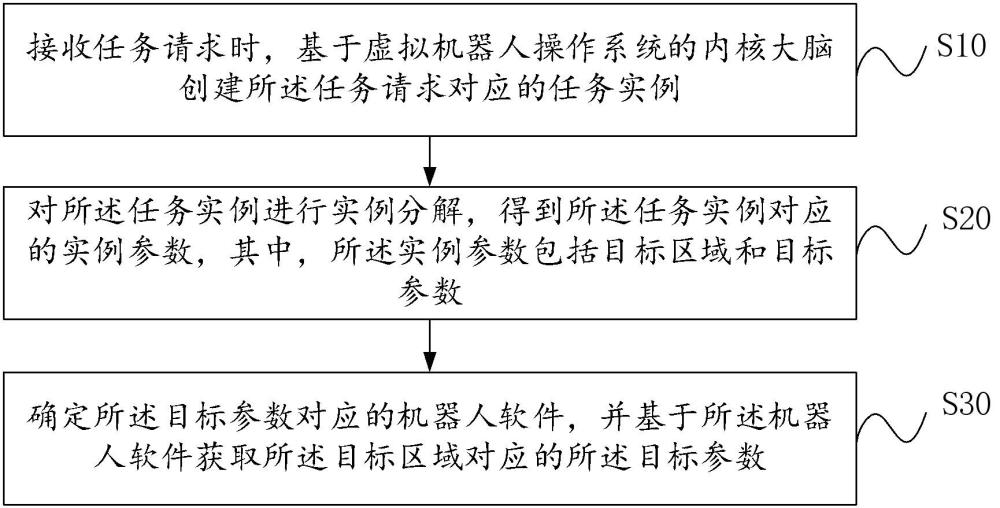
3、接收任务请求时,基于虚拟机器人操作系统的内核大脑创建所述任务请求对应的任务实例;
4、对所述任务实例进行实例分解,得到所述任务实例对应的实例参数,其中,所述实例参数包括目标区域和目标参数;
5、确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数。
6、可选地,所述确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数的步骤包括:
7、确定所述目标参数在本地映射表、云端映射表和/或历史任务实例日志中对应的所述机器人软件;
8、将所述机器人软件的地址信息封装到数据转发指令中,并基于所述虚拟机器人操作系统的emitter,将所述数据转发指令发送至服务端,其中,所述服务端基于所述地址信息选定所述机器人软件,并将所述数据转发指令对应的所述实例参数作为执行任务下发至所述机器人软件;
9、接收所述服务端反馈的,基于所述机器人软件获取的所述目标区域对应的所述目标参数。
10、可选地,所述将所述机器人软件的地址信息封装到数据转发指令中,并基于所述虚拟机器人操作系统的emitter,将所述数据转发指令发送至服务端的步骤之后,还包括:
11、在接收到实例任务的子任务的暂停指令和/或销毁指令时,确定所述暂停指令或所述销毁指令对应的目标机器人软件;
12、生成实例暂停信息和/或实例销毁信息,并将所述实例暂停信息和/或所述实例销毁信息发送至所述服务端,以使所述服务端进行实例暂停和/或实例销毁的信息转发后,所述目标机器人软件暂停和/或销毁当前正在执行的任务。
13、可选地,所述确定所述目标参数在本地映射表、云端映射表和/或历史任务实例日志中对应的所述机器人软件的步骤之后,还包括:
14、确定所述目标参数对应的参数获取顺序,并根据所述参数获取顺序确定所述目标机器人软件的指令下发顺序;
15、基于所述指令下发顺序执行所述将所述机器人软件的地址信息封装到数据转发指令中,并基于所述虚拟机器人操作系统的emitter,将所述数据转发指令发送至服务端的步骤。
16、可选地,所述对所述任务实例进行实例分解,得到所述任务实例对应的实例参数,其中,所述实例参数包括目标区域和目标参数的步骤之前,还包括:
17、将所述任务实例发送至所述内核大脑的脚本大脑;
18、所述对所述任务实例进行实例分解,得到所述任务实例对应的实例参数的步骤包括:
19、调用脚本大脑的实例分解脚本,对所述任务实例进行实例分解,得到所述任务实例需要获取的所述实例参数,所述实例参数包括目标区域以及所述目标区域内对应的所述目标参数。
20、可选地,所述接收任务请求时,基于虚拟机器人操作系统的内核大脑创建所述任务请求对应的任务实例的步骤包括:
21、接收到所述任务请求时,确定所述任务请求对应的文本请求类型;
22、在所述文本请求类型为文字类型时,确定所述文字类型对应的关键字,并基于代码映射模块确定所述关键字对应的执行代码;
23、将所述执行代码发送至所述内核大脑对应的机器人实例大脑,并基于所述机器人实例大脑创建所述任务请求对应的所述任务实例;
24、在所述文本请求类型为代码类型时,基于所述代码类型的代码信息,执行所述将所述执行代码发送至所述内核大脑对应的机器人实例大脑,并基于所述机器人实例大脑创建所述任务请求对应的所述任务实例的步骤。
25、可选地,所述接收到所述任务请求时,确定所述任务请求对应的文本请求类型的步骤之后,还包括:
26、在所述文本请求类型为文字类型时,将所述文字类型对应的文字信息发送至所述内核大脑的脚本大脑;
27、基于所述脚本大脑的实例生成脚本对所述文字信息进行处理,生成所述任务请求对应的所述任务实例。
28、可选地,所述确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数的步骤之后,还包括:
29、根据所述内核大脑的脚本大脑的数据校验脚本,对所述目标参数进行校验处理;
30、将校验通过后的所述目标参数存储至所述内核大脑的存储大脑。
31、此外,为实现上述目的,本发明还提供一种虚拟机器人的实例处理装置,所述虚拟机器人的实例处理装置包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的虚拟机器人的实例处理程序,所述虚拟机器人的实例处理程序被所述处理器执行时实现如上所述的虚拟机器人的实例处理方法的步骤。
32、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有虚拟机器人的实例处理程序,所述虚拟机器人的实例处理程序被处理器执行时实现如上所述的虚拟机器人的实例处理方法的步骤。
33、本发明实施例提供了虚拟机器人的实例处理方法、实例处理装置及存储介质,在接收任务请求时,基于虚拟机器人操作系统的内核大脑创建所述任务请求对应的任务实例,随后对所述任务实例进行实例分解,得到所述任务实例对应的实例参数,其中,所述实例参数包括目标区域和目标参数,接着确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数,基于此,通过对实例进行分解识别处理,可以自动将处理后的子需求下发到对应的机器人软件,并由机器人软件执行相应的任务,减少了需要人工进行执行方的选择,提高了实例的处理效率。
技术特征:
1.一种虚拟机器人的实例处理方法,其特征在于,所述虚拟机器人的实例处理方法包括:
2.如权利要求1所述的虚拟机器人的实例处理方法,其特征在于,所述确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数的步骤包括:
3.如权利要求2所述的虚拟机器人的实例处理方法,其特征在于,所述将所述机器人软件的地址信息封装到数据转发指令中,并基于所述虚拟机器人操作系统的emitter,将所述数据转发指令发送至服务端的步骤之后,还包括:
4.如权利要求2所述的虚拟机器人的实例处理方法,其特征在于,所述确定所述目标参数在本地映射表、云端映射表和/或历史任务实例日志中对应的所述机器人软件的步骤之后,还包括:
5.如权利要求1所述的虚拟机器人的实例处理方法,其特征在于,所述对所述任务实例进行实例分解,得到所述任务实例对应的实例参数,其中,所述实例参数包括目标区域和目标参数的步骤之前,还包括:
6.如权利要求1所述的虚拟机器人的实例处理方法,其特征在于,所述接收任务请求时,基于虚拟机器人操作系统的内核大脑创建所述任务请求对应的任务实例的步骤包括:
7.如权利要求6所述的虚拟机器人的实例处理方法,其特征在于,所述接收到所述任务请求时,确定所述任务请求对应的文本请求类型的步骤之后,还包括:
8.如权利要求1所述的虚拟机器人的实例处理方法,其特征在于,所述确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数的步骤之后,还包括:
9.一种虚拟机器人的实例处理装置,其特征在于,所述虚拟机器人的实例处理装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的虚拟机器人的实例处理程序,所述虚拟机器人的实例处理程序被所述处理器执行时实现如权利要求1至8中任一项所述的虚拟机器人的实例处理方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有虚拟机器人的实例处理程序,所述虚拟机器人的实例处理程序被处理器执行时实现如权利要求1至8中任一项所述的虚拟机器人的实例处理方法的步骤。
技术总结
本发明公开了虚拟机器人的实例处理方法、实例处理装置及存储介质,其中,所述方法包括以下步骤:接收任务请求时,基于虚拟机器人操作系统的内核大脑创建所述任务请求对应的任务实例;对所述任务实例进行实例分解,得到所述任务实例对应的实例参数,其中,所述实例参数包括目标区域和目标参数;确定所述目标参数对应的机器人软件,并基于所述机器人软件获取所述目标区域对应的所述目标参数。本发明通过对实例进行分解识别处理,可以自动将处理后的子需求下发到对应的机器人软件,并由机器人软件执行相应的任务,减少了需要人工进行执行方的选择,提高了实例的处理效率。
技术研发人员:潘小康,蒋玉华,钟浩灵
受保护的技术使用者:深圳市极限网络科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!