一种基于改进的OrientedR-CNN的遥感图像跑道目标检测方法
本发明属于遥感目标检测检测领域,具体涉及一种基于改进的orientedr-cnn的遥感图像跑道目标检测方法。
背景技术:
1、遥感图像在许多领域中都有着广泛的应用,如地理信息系统、城市规划、环境保护、军事侦察等。在这些应用中,对遥感图像中特定目标的检测和识别是一项关键任务。而跑道目标检测是其中的一个重要方面,它可以为飞机、车辆等目标的监测和追踪提供支持。然而,由于遥感图像的分辨率通常较低,且目标与背景之间的对比度不高,这使得跑道目标的检测和识别变得非常困难。
2、近年来,深度学习技术在目标检测领域取得了显著的进展。其中,基于区域卷积神经网络(r-cnn)的目标检测方法在遥感图像中的应用也得到了广泛关注。然而,传统的r-cnn方法在处理遥感图像时仍存在一些问题,如检测精度不高、计算量大等。此外,由于遥感图像中跑道目标的形状和大小各异,且可能存在多种干扰因素,如云层、树木等,这使得跑道目标的检测更加困难。orientedr-cnn算法有效的解决了这类问题,但不足的是该算法对跑道特征的提取能力并不好。
技术实现思路
1、本发明的目的在于提供一种检测精度与准确率高的基于改进的orientedr-cnn的遥感图像跑道目标检测方法。
2、基于上述目的,本发明采用如下技术方案:
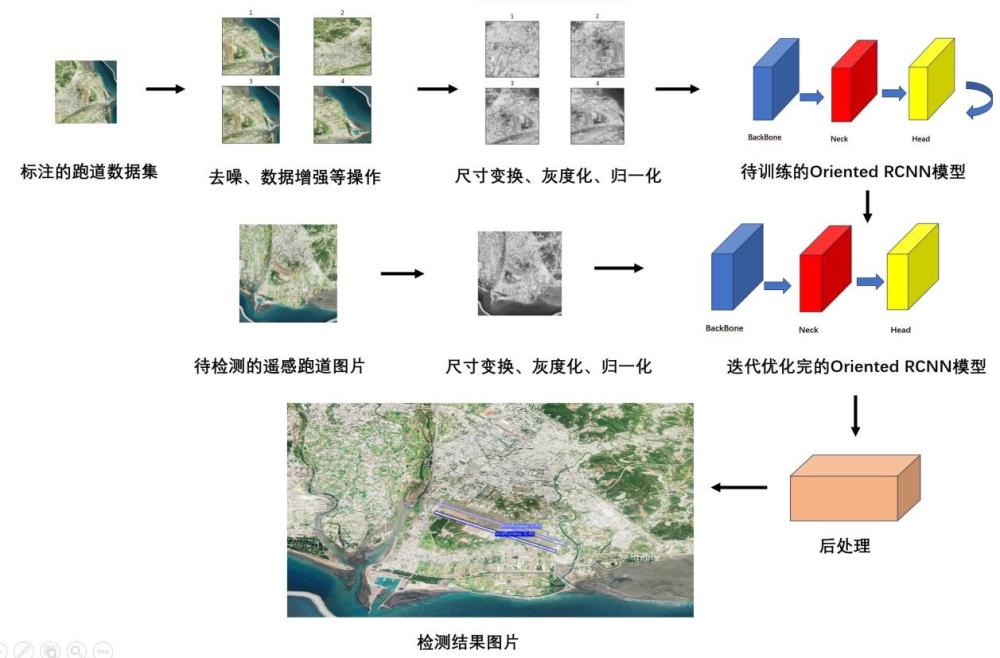
3、一种基于改进的orientedr-cnn的遥感图像跑道目标检测方法,该方法的主要流程包括特征提取、多尺度特征融合、带方向感知的区域提议、定向roi对齐、目标分类和框精细回归、非极大值抑制、阈值筛选、预测框修正以及框尺寸还原,具体包括以下步骤:
4、步骤1,采集包括跑道的多个角度和高度下的遥感图像,建立数据集;将数据集划分为训练集和验证集;对训练集和验证集中的遥感图像中跑道的边框和类别进行标注,获得标注后的遥感图像;
5、步骤2,将训练集中标注后的遥感图像进行尺寸变换和归一化处理,得到归一化的遥感图像;
6、步骤3,将归一化的遥感图像输入改进的orientedr-cnn模型;首先,backbone模块对归一化的遥感图像进行处理,得到具有多尺度特征的特征图;backbone模块包括添加了注意力机制的resnet50;再将具有多尺度特征的特征图输入到带方向感知的区域提议网络,得到多个候选框;然后通过定向roi对齐模块得到感兴趣区域;根据感兴趣区域计算模型的损失,对模型的参数进行调整;重复步骤2-3,得到检测网络;
7、步骤4,将待检测的遥感图像输入检测网络,进行目标检测。
8、进一步的,在步骤3中,得到具有多尺度特征的特征图的方法为:resnet50提取归一化的遥感图像的原始特征,然后senet模块使用全局平均池化层来计算每个通道的平均值,对原始特征进行压缩;再使用一个可学习的参数计算原始特征每个通道的权重,使用计算出的每个通道的权重来重新调整原始特征的权重,得到特征图;最后将特征图输入fpn进行多尺度特征提取,得到具有多尺度特征的特征图。
9、进一步的,在步骤3中,生成有向候选框的方法为:对于具有多尺度特征的特征图每个位置的anchor,带方向感知的区域提议网络输出有向候选框外接矩形的参数,有向候选框外接矩形的参数包括有向候选框外接矩形的中心坐标(xy)、宽(w)和高(h),以及有向候选框外接矩形顶边中点的偏移量(δα)和右边中点的偏移(δβ),对有向候选框外接矩形的参数进行解码,得到有向候选框顶点的坐标集合。
10、进一步的,在步骤3中,得到多个候选框的方法为:带方向感知的区域提议网络生成有向候选框;根据有向候选框区域的旋转角度,对标注后的遥感图像进行旋转操作,将有向候选框区域旋转到水平方向;根据旋转后的有向候选框区域的位置和大小,计算感兴趣区域的坐标;再使用roialign方法对旋转后的有向候选框区域进行特征提取,得到旋转区域特征图;将感兴趣区域与旋转区域特征图对齐,然后使用双线性插值对roi内的像素进行插值,以获得更加准确的特征提取结果;从对齐后的旋转区域特征图中提取出与旋转目标相关的特征,得到相关特征图;再将相关特征图输入到带方向感知的区域提议网络,得到多个候选框。
11、进一步的,在步骤3中,计算模型的损失的方法为:在感兴趣区域进行分类和框回归,再与图像标签的中心值进行计算得到中心点损失;将感兴趣区域经由两个fc全连接层,得到向量;将向量分别与图像标签的类别值和边界框的值进行计算,得到交叉熵损失和l1平滑损失;将中心点损失、交叉熵损失和l1平滑损失进行计算得到模型的损失。
12、进一步的,在步骤2中,将标注后的遥感图像进行尺寸变换的方法为:根据遥感图像中目标点的左上、右上、左下和右下四个像素点的相对距离和权重,计算目标点的灰度值或颜色值,得到尺寸变换后的遥感图像。
13、进一步的,在步骤2中,得到归一化的遥感图像的方法为:将尺寸变换后的遥感图像的每个像素位置映射到标注后的遥感图像中最近的像素位置,并取标注后的遥感图像中最近的像素位置的像素的灰度值作为目标像素的灰度值;再通过转换公式将尺寸调整后的图像进行归一化,转换公式如下:
14、x'=(n-μ)/σ
15、式中,x'为归一化的图片矩阵,n为原图片矩阵,μ为图像所有像素点的均值,σ为图像所有像素点的方差。
16、一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时实现任一上述的基于改进的oriented r-cnn的遥感图像跑道目标检测方法中的任一步骤。
17、一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序经计算机处理器执行时实现任一上述的基于改进的oriented r-cnn的遥感图像跑道目标检测方法中的任一步骤。
18、一种电子设备,包括存储器及处理器,存储器上存储有计算机程序,处理器执行计算机程序时实现任一上述的基于改进的oriented r-cnn的遥感图像跑道目标检测方法。
19、与现有技术相比,本发明的有益效果如下:
20、本发明通过自行采集的方式获取遥感图像中的跑道数据。采集过程中考虑了跑道类型、光照条件、分辨率、拍摄高度等因素,以保证数据集的多样性和代表性。通过对现有的oriented r-cnn网络框架进行改进,提出了一种基于改进oriented r-cnn的遥感图像的跑道检测方法,本发明通过在backbone的resnet50内添加senet模块,从而提高遥感图像跑道目标检测的准确性和鲁棒性。同时,该方法具有较好的泛化性能,可以适应不同的遥感图像数据集。本申请改进oriented r-cnn模型相比原模型在准确率precision、recall召回率、map50三个方面都有一定提升。
技术特征:
1.一种基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,在步骤3中,得到具有多尺度特征的特征图的方法为:resnet50提取归一化的遥感图像的原始特征,然后senet模块使用全局平均池化层来计算每个原始特征的通道的平均值,对特征进行压缩;再使用一个可学习的参数计算并调整原始特征每个的通道的权重,得到特征图;最后将特征图输入fpn进行多尺度特征提取,得到具有多尺度特征的特征图。
3.如权利要求2所述的基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,在步骤3中,得到多个候选框的方法为:带方向感知的区域提议网络生成有向候选框;根据有向候选框区域的旋转角度,对标注后的遥感图像进行旋转操作,将有向候选框区域旋转到水平方向;根据旋转后的有向候选框区域的位置和大小,计算感兴趣区域的坐标;再使用roialign方法对旋转后的有向候选框区域进行特征提取,得到旋转区域特征图;将感兴趣区域与旋转区域特征图对齐,然后使用双线性插值对roi内的像素进行插值;从对齐后的旋转区域特征图中提取出与旋转目标相关的特征,得到相关特征图;再将相关特征图输入到带方向感知的区域提议网络,得到多个候选框。
4.如权利要求3所述的基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,在步骤3中,生成有向候选框的方法为:对于具有多尺度特征的特征图每个位置的anchor,带方向感知的区域提议网络输出有向候选框外接矩形的参数,对有向候选框外接矩形的参数进行解码,得到有向候选框顶点的坐标集合。
5.如权利要求4所述的基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,在步骤3中,计算模型的损失的方法为:在感兴趣区域进行分类和框回归,再与图像标签的中心值进行计算得到中心点损失;将感兴趣区域经由两个fc全连接层,得到向量;将向量分别与图像标签的类别值和边界框的值进行计算,得到交叉熵损失和l1平滑损失;根据中心点损失、交叉熵损失和l1平滑损失计算得到模型的损失。
6.如权利要求1-5任一所述的基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,在步骤2中,将标注后的遥感图像进行尺寸变换的方法为:根据遥感图像中目标点的左上、右上、左下和右下四个像素点的相对距离和权重,计算目标点的灰度值或颜色值,得到尺寸变换后的遥感图像。
7.如权利要求6所述的基于改进的orientedr-cnn的遥感图像跑道目标检测方法,其特征在于,在步骤2中,得到归一化的遥感图像的方法为:将尺寸变换后的遥感图像的每个像素位置映射到标注后的遥感图像中最近的像素位置,并取该像素的灰度值作为尺寸变换后的遥感图像的像素的灰度值;再通过转换公式将尺寸调整后的图像进行归一化,转换公式如下:
8.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述的基于改进的oriented r-cnn的遥感图像跑道目标检测方法中的任一步骤。
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序经计算机处理器执行时实现如权利要求1-7任一所述的基于改进的oriented r-cnn的遥感图像跑道目标检测方法中的任一步骤。
10.一种电子设备,包括存储器及处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任一所述的基于改进的oriented r-cnn的遥感图像跑道目标检测方法。
技术总结
本发明属于遥感目标检测检测领域,具体公开一种基于改进的Oriented R‑CNN的遥感图像跑道目标检测方法;包括如下步骤:构建跑道的遥感图像数据集;将跑道的遥感图像数据集按比例划分为训练集和测试集,对训练集和测试集进行标注;建立Oriented R‑CNN检测模型;设置网络参数;训练Oriented R‑CNN检测模型;将待预测图片输入Oriented RPN生成包含方向信息的候选框;通过Midpoint Offset Representation获取有向候选框的顶点坐标;通过Rotated RoIAlign提取尺寸变换后的遥感图像的特征;通过回归分支和分类分支对候选框进行精细回归和目标分类,从而获得目标的检测框以及类别;本发明提出的基于改进的Oriented R‑CNN目标检测算法在检测遥感跑道目标时具有较高的准确率和检测精度。
技术研发人员:叶春龙,周洋,瞿栋,彭艳,谢少荣,罗均,蒲华燕
受保护的技术使用者:上海大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!