基于触觉信息的摇杆操作控制方法及系统与流程
本申请涉及摇杆操作控制,尤其涉及一种基于触觉信息的摇杆操作控制方法及系统。
背景技术:
1、在当今科技发展迅猛的环境下,虚拟和增强现实技术越来越广泛地应用于各个领域,其中包括虚拟游戏和模拟训练。摇杆是许多虚拟环境中的重要输入设备,它允许用户在虚拟世界中进行精确而流畅的控制。然而,传统的摇杆操作存在一些问题,如难以模拟真实触觉反馈,容易引起疲劳,且控制精度有限。因此,研究人员积极探索如何改进摇杆操作,以提供更好的用户体验和更高的控制精度。
2、现有技术但仍然存在一些挑战。如何更准确地模拟外部触觉作用力以提供更真实的体验,是一个关键问题。其次,如何优化控制策略以提高摇杆操作的精度和效率,也是当前研究的重点。如何将各种技术和方法有效地集成到一个综合的控制系统中,以实现更好的摇杆操作控制,也是亟待解决的问题。
技术实现思路
1、本申请提供了一种基于触觉信息的摇杆操作控制方法及系统,本申请通过识别触觉信息进行摇杆操作控制补偿分析从而提高了摇杆操作控制的精度。
2、第一方面,本申请提供了一种基于触觉信息的摇杆操作控制方法,所述基于触觉信息的摇杆操作控制方法包括:
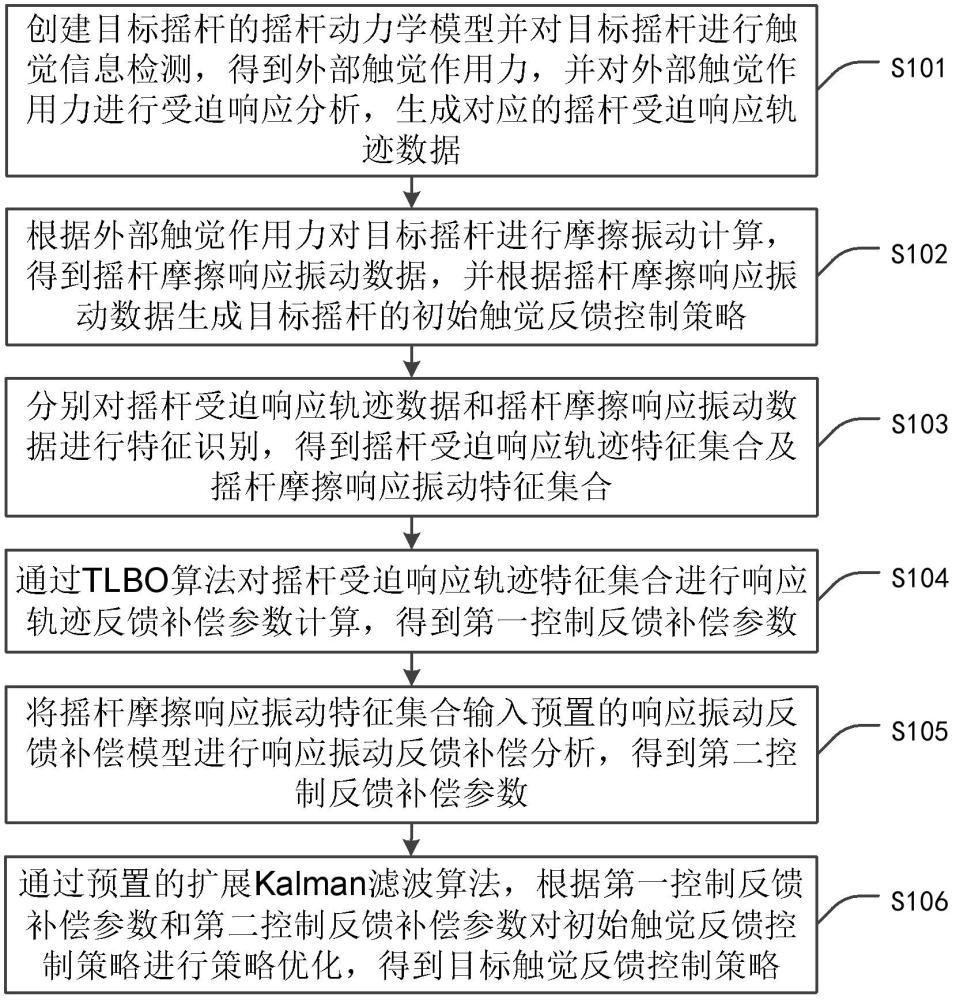
3、创建目标摇杆的摇杆动力学模型并对所述目标摇杆进行触觉信息检测,得到外部触觉作用力,并对所述外部触觉作用力进行受迫响应分析,生成对应的摇杆受迫响应轨迹数据;
4、根据所述外部触觉作用力对所述目标摇杆进行摩擦振动计算,得到摇杆摩擦响应振动数据,并根据所述摇杆摩擦响应振动数据生成所述目标摇杆的初始触觉反馈控制策略;
5、分别对所述摇杆受迫响应轨迹数据和所述摇杆摩擦响应振动数据进行特征识别,得到摇杆受迫响应轨迹特征集合及摇杆摩擦响应振动特征集合;
6、通过tlbo算法对所述摇杆受迫响应轨迹特征集合进行响应轨迹反馈补偿参数计算,得到第一控制反馈补偿参数;
7、将所述摇杆摩擦响应振动特征集合输入预置的响应振动反馈补偿模型进行响应振动反馈补偿分析,得到第二控制反馈补偿参数;
8、通过预置的扩展kalman滤波算法,根据所述第一控制反馈补偿参数和所述第二控制反馈补偿参数对所述初始触觉反馈控制策略进行策略优化,得到目标触觉反馈控制策略。
9、第二方面,本申请提供了一种基于触觉信息的摇杆操作控制系统,所述基于触觉信息的摇杆操作控制系统包括:
10、创建模块,用于创建目标摇杆的摇杆动力学模型并对所述目标摇杆进行触觉信息检测,得到外部触觉作用力,并对所述外部触觉作用力进行受迫响应分析,生成对应的摇杆受迫响应轨迹数据;
11、计算模块,用于根据所述外部触觉作用力对所述目标摇杆进行摩擦振动计算,得到摇杆摩擦响应振动数据,并根据所述摇杆摩擦响应振动数据生成所述目标摇杆的初始触觉反馈控制策略;
12、识别模块,用于分别对所述摇杆受迫响应轨迹数据和所述摇杆摩擦响应振动数据进行特征识别,得到摇杆受迫响应轨迹特征集合及摇杆摩擦响应振动特征集合;
13、处理模块,用于通过tlbo算法对所述摇杆受迫响应轨迹特征集合进行响应轨迹反馈补偿参数计算,得到第一控制反馈补偿参数;
14、分析模块,用于将所述摇杆摩擦响应振动特征集合输入预置的响应振动反馈补偿模型进行响应振动反馈补偿分析,得到第二控制反馈补偿参数;
15、优化模块,用于通过预置的扩展kalman滤波算法,根据所述第一控制反馈补偿参数和所述第二控制反馈补偿参数对所述初始触觉反馈控制策略进行策略优化,得到目标触觉反馈控制策略。
16、本申请提供的技术方案中,通过建立摇杆的动力学模型以及对外部触觉作用力进行受迫响应分析,能够实现对摇杆操作的高精度触觉反馈,使用户可以更准确地感知和控制摇杆的位置和状态。对摇杆受迫响应轨迹和摩擦响应振动进行特征识别,可以有效识别和去除异常值,从而提高了系统对外部干扰的抗干扰性,减小了不稳定因素对控制的影响。通过使用tlbo算法和响应振动反馈补偿模型,方法能够根据不同的摇杆和用户需求生成个性化的控制策略。这可以适应不同用户和不同摇杆的操作特点,提供更符合用户期望的控制体验。使用扩展kalman滤波算法对控制策略进行动态实时更新,可以应对系统运行过程中的变化,确保触觉反馈控制策略的持续有效性。通过提供更精确的触觉反馈,可以显著提高用户在摇杆操作中的体验和控制感,进而通过识别触觉信息进行摇杆操作控制补偿分析从而提高了摇杆操作控制的精度。
技术特征:
1.一种基于触觉信息的摇杆操作控制方法,其特征在于,所述基于触觉信息的摇杆操作控制方法包括:
2.根据权利要求1所述的基于触觉信息的摇杆操作控制方法,其特征在于,所述创建目标摇杆的摇杆动力学模型并对所述目标摇杆进行触觉信息检测,得到外部触觉作用力,并对所述外部触觉作用力进行受迫响应分析,生成对应的摇杆受迫响应轨迹数据,包括:
3.根据权利要求1所述的基于触觉信息的摇杆操作控制方法,其特征在于,所述根据所述外部触觉作用力对所述目标摇杆进行摩擦振动计算,得到摇杆摩擦响应振动数据,并根据所述摇杆摩擦响应振动数据生成所述目标摇杆的初始触觉反馈控制策略,包括:
4.根据权利要求1所述的基于触觉信息的摇杆操作控制方法,其特征在于,所述分别对所述摇杆受迫响应轨迹数据和所述摇杆摩擦响应振动数据进行特征识别,得到摇杆受迫响应轨迹特征集合及摇杆摩擦响应振动特征集合,包括:
5.根据权利要求1所述的基于触觉信息的摇杆操作控制方法,其特征在于,所述通过tlbo算法对所述摇杆受迫响应轨迹特征集合进行响应轨迹反馈补偿参数计算,得到第一控制反馈补偿参数,包括:
6.根据权利要求1所述的基于触觉信息的摇杆操作控制方法,其特征在于,所述将所述摇杆摩擦响应振动特征集合输入预置的响应振动反馈补偿模型进行响应振动反馈补偿分析,得到第二控制反馈补偿参数,包括:
7.根据权利要求1所述的基于触觉信息的摇杆操作控制方法,其特征在于,所述通过预置的扩展kalman滤波算法,根据所述第一控制反馈补偿参数和所述第二控制反馈补偿参数对所述初始触觉反馈控制策略进行策略优化,得到目标触觉反馈控制策略,包括:
8.一种基于触觉信息的摇杆操作控制系统,其特征在于,所述基于触觉信息的摇杆操作控制系统包括:
技术总结
本申请涉及摇杆操作控制技术领域,公开了一种基于触觉信息的摇杆操作控制方法及系统。所述方法包括:创建目标摇杆的摇杆动力学模型并检测外部触觉作用力,生成摇杆受迫响应轨迹数据;计算摇杆摩擦响应振动数据,并生成初始触觉反馈控制策略;进行特征识别,得到摇杆受迫响应轨迹特征集合及摇杆摩擦响应振动特征集合;进行响应轨迹反馈补偿参数计算,得到第一控制反馈补偿参数;通过响应振动反馈补偿模型进行响应振动反馈补偿分析,得到第二控制反馈补偿参数;进行策略优化,得到目标触觉反馈控制策略,本申请通过识别触觉信息进行摇杆操作控制补偿分析从而提高了摇杆操作控制的精度。
技术研发人员:曾晓,赵建波,邱辉
受保护的技术使用者:广东控银实业有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!