激光雷达拼接配准方法、系统、装置及计算机存储介质与流程
本发明涉及激光雷达领域,尤其涉及一种激光雷达拼接配准方法、系统、装置及计算机存储介质。
背景技术:
1、激光雷达有一定的扫描视场范围,通常单个激光雷达无法做到多视场角、大视场角和高帧率兼顾,因此需要将多个激光雷达的点云融合、配准到统一的坐标系,以便于统一计算。
2、现有点云匹配算法都是基于两帧点云的视场交叠部分实施的。而此类算法必然存在视场浪费,对于一些需要广角覆盖,或者多激光雷达分布式布置实现广域覆盖时,会增加激光雷达的使用数量,提高建设费用。
3、针对现有技术中视场不重叠的激光雷达的无法配准的问题,目前还没有一个有效的解决方法。
技术实现思路
1、为解决上述问题,本发明提供一种激光雷达拼接配准方法、系统、装置及计算机存储介质,通过对移动的桥接部件进行跟踪,当其行进到两个激光雷达视场交界处时,识别桥接部件的点云作为关联纽带,实现两个视场交叠少或无交叠的激光雷达点云配准与融合,以解决现有技术中激光雷达视场浪费、在视场不重叠的激光雷达的无法配准的问题。
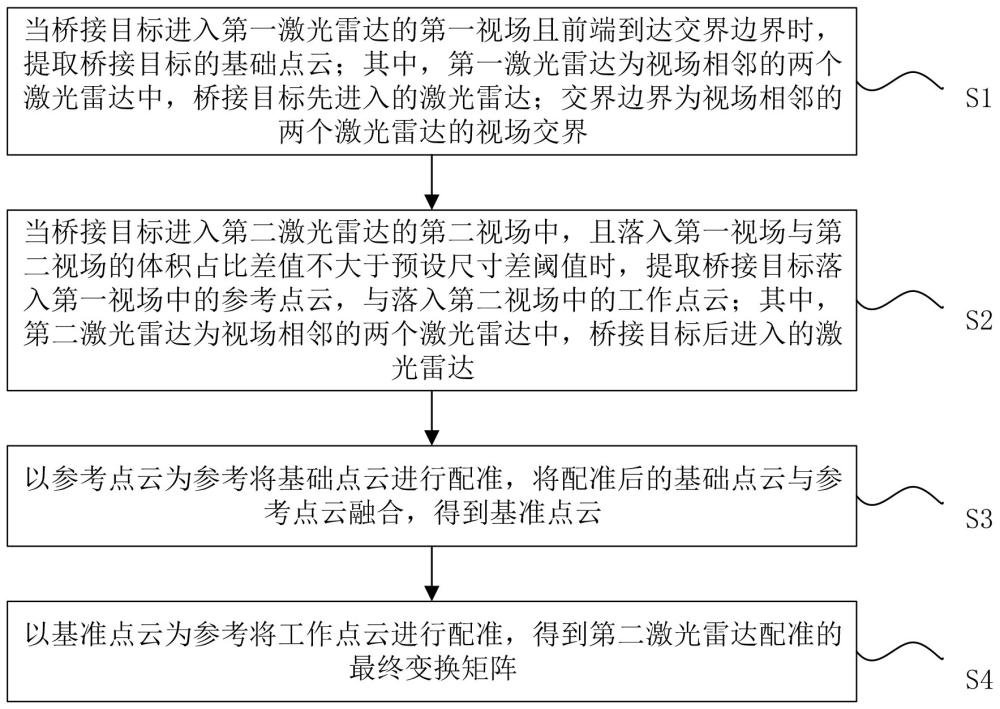
2、为达到上述目的,本发明提供了一种激光雷达拼接配准方法,包括:当桥接目标进入第一激光雷达的第一视场且前端到达交界边界时,提取所述桥接目标的基础点云;其中,所述第一激光雷达为视场相邻的两个激光雷达中,桥接目标先进入的激光雷达;所述交界边界为视场相邻的两个激光雷达的视场交界;当所述桥接目标进入第二激光雷达的第二视场中,且落入第一视场与第二视场的体积占比差值不大于预设尺寸差阈值时,提取所述桥接目标落入第一视场中的参考点云,与落入第二视场中的工作点云;其中,所述第二激光雷达为视场相邻的两个激光雷达中,桥接目标后进入的激光雷达;以所述参考点云为参考将所述基础点云进行配准,将配准后的基础点云与所述参考点云融合,得到基准点云;以所述基准点云为参考将所述工作点云进行配准,得到第二激光雷达配准的最终变换矩阵。
3、进一步可选的,所述提取所述桥接目标的基础点云包括:实时采集所述第一激光雷达的当前第一点云,将所述当前第一点云与第一背景点云进行差分,得到当前第一目标点云;其中,所述第一背景点云根据第一视场预先获取;若当前第一目标点云的端点与所述交界边界的距离不大于预设距离阈值,将当前第一目标点云作为所述基础点云。
4、进一步可选的,提取所述桥接目标落入第一视场中的参考点云,与落入第二视场中的工作点云,包括:实时采集所述第二激光雷达的当前第二点云,将所述当前第二点云与第二背景点云进行差分,得到当前第二目标点云;其中,所述第二背景点云根据第二视场预先获取;计算当前第二目标点云的尺寸与桥接目标总尺寸的第一体积占比,计算当前第一目标点云的尺寸与桥接目标总尺寸的第二体积占比,根据所述第一体积占比与第二体积占比计算所述体积占比差值;若所述体积占比差值不大于预设尺寸差阈值,将当前第一目标点云作为参考点云,将当前第二目标点云作为工作点云。
5、进一步可选的,所述以所述基准点云为参考将所述工作点云进行配准,得到第二激光雷达配准的最终变换矩阵,包括:获取以所述基准点云为参考将工作点云进行配准的配准变换矩阵;根据所述配准变换矩阵与第二激光雷达的初始变换矩阵计算得到最终变换矩阵;其中,所述初始变换矩阵预先根据第二激光雷达的安装参数设置。
6、另一方面,本发明还提供了一种激光雷达拼接配准系统,包括:第一点云提取模块,用于当桥接目标进入第一激光雷达的第一视场且前端到达交界边界时,提取所述桥接目标的基础点云;其中,所述第一激光雷达为视场相邻的两个激光雷达中,桥接目标先进入的激光雷达;所述交界边界为视场相邻的两个激光雷达的视场交界;第二点云提取模块,用于当所述桥接目标进入第二激光雷达的第二视场中,且落入第一视场与第二视场的体积占比差值不大于预设尺寸差阈值时,提取所述桥接目标落入第一视场中的参考点云,与落入第二视场中的工作点云;其中,所述第二激光雷达为视场相邻的两个激光雷达中,桥接目标后进入的激光雷达;第一配准模块,用于以所述参考点云为参考将所述基础点云进行配准,将配准后的基础点云与所述参考点云融合,得到基准点云;第二配准模块,用于以所述基准点云为参考将所述工作点云进行配准,得到第二激光雷达配准的最终变换矩阵。
7、进一步可选的,所述第一点云提取模块包括:第一差分子模块,用于实时采集所述第一激光雷达的当前第一点云,将所述当前第一点云与第一背景点云进行差分,得到当前第一目标点云;其中,所述第一背景点云根据第一视场预先获取;第一判断子模块,用于若当前第一目标点云的端点与所述交界边界的距离不大于预设距离阈值,将当前第一目标点云作为所述基础点云。
8、进一步可选的,所述第二点云提取模块包括:第二差分子模块,用于实时采集所述第二激光雷达的当前第二点云,将所述当前第二点云与第二背景点云进行差分,得到当前第二目标点云;其中,所述第二背景点云根据第二视场预先获取;计算子模块,用于计算当前第二目标点云的尺寸与桥接目标总尺寸的第一体积占比,计算当前第一目标点云的尺寸与桥接目标总尺寸的第二体积占比,根据所述第一体积占比与第二体积占比计算所述体积占比差值;第二判断子模块,用于若所述体积占比差值不大于预设尺寸差阈值,将当前第一目标点云作为参考点云,将当前第二目标点云作为工作点云。
9、进一步可选的,所述第二配准模块包括:配准变换矩阵获取子模块,用于获取以所述基准点云为参考将工作点云进行配准的配准变换矩阵;最终变换矩阵计算子模块,用于根据所述配准变换矩阵与第二激光雷达的初始变换矩阵计算得到最终变换矩阵;其中,所述初始变换矩阵预先根据第二激光雷达的安装参数设置。
10、另一方面,本发明还提供了一种激光雷达拼接配准装置,包括上述的激光雷达拼接配准系统。
11、另一方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述的激光雷达拼接配准方法。
12、上述技术方案具有如下有益效果:引入了运动目标和目标识别,等效地扩展了激光雷达的视场角范围,可实现两个视场很少交叠或几乎无交叠的激光雷达的点云配准;与常规点云配准算法相比,可提高交叠少的激光雷达之间的点云配准精度;可实现相邻但无交叠的激光雷达之间的点云配准;可最大化的利用激光雷达的视场范围,在两个或多个激光雷达实现大范围扫描覆盖时,有效降低建设成本。
技术特征:
1.一种激光雷达拼接配准方法,其特征在于,包括:
2.根据权利要求1所述的激光雷达拼接配准方法,其特征在于,所述提取所述桥接目标的基础点云包括:
3.根据权利要求2所述的激光雷达拼接配准方法,其特征在于,提取所述桥接目标落入第一视场中的参考点云,与落入第二视场中的工作点云,包括:
4.根据权利要求1所述的激光雷达拼接配准方法,其特征在于,所述以所述基准点云为参考将所述工作点云进行配准,得到第二激光雷达配准的最终变换矩阵,包括:
5.一种激光雷达拼接配准系统,其特征在于,包括:
6.根据权利要求5所述的激光雷达拼接配准系统,所述第一点云提取模块包括:
7.根据权利要求6所述的激光雷达拼接配准系统,所述第二点云提取模块包括:
8.根据权利要求5所述的激光雷达拼接配准系统,其特征在于,所述第二配准模块包括:
9.一种激光雷达拼接配准装置,包括如权利要求5-8任一项所述的激光雷达拼接配准系统。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-4任一项所述的激光雷达拼接配准方法。
技术总结
本发明实施例公开了一种激光雷达拼接配准方法、系统、装置及计算机存储介质,其中,该方法包括:当桥接目标进入第一激光雷达的第一视场且前端到达交界边界时,提取桥接目标的基础点云;当桥接目标进入第二激光雷达的第二视场中,且落入第一视场与第二视场的体积占比差值不大于预设尺寸差阈值时,提取桥接目标落入第一视场中的参考点云,与落入第二视场中的工作点云;以参考点云为参考将基础点云进行配准,将配准后的基础点云与参考点云融合,得到基准点云;以基准点云为参考将工作点云进行配准,得到第二激光雷达配准的最终变换矩阵。在减少视场浪费的前提下提高激光雷达之间的点云配准精度。
技术研发人员:俞永方,何文平,欧阳志益,叶建标,徐炜
受保护的技术使用者:浙江华是科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!