一种点云数据的处理方法、装置、设备及介质与流程
本发明涉及计算机视觉,尤其涉及一种点云数据的处理方法、装置、设备及介质。
背景技术:
1、视觉显著性描述了给定场景下的人类注意力分布或眼球运动,检测这种视觉显著性的区域也是计算机视觉和计算机图形学领域的研究重点。
2、然而,大多数的显著性检测研究主要聚焦在二维图像和视频上,只有少数检测三维点云显著性的方法被提出。三维点云包含着大量的数据且容易受到噪声影响,现有的基于二维数据设计的显著性检测方法也难以直接应用于三维点云的显著性检测中,这使得三维点云的显著性检测比二维数据更具挑战性。
3、现有技术中通过计算三维点云数据的局部协方差矩阵特征值来进行显著性检测的多尺度,但该方式对三维点云进行显著性评估需要耗费大量的计算资源,而在实际应用过程中,移动机器人能够搭载的计算资源是十分有限的。
技术实现思路
1、本发明提供了一种点云数据的处理方法、装置、设备及介质,利用轻量级的目标显著性类别模型来代替复杂的点云显著性求解过程,在保证一定研判精度的同时大幅度提升计算效率。
2、根据本发明的一方面,提供了一种点云数据的处理方法,包括:
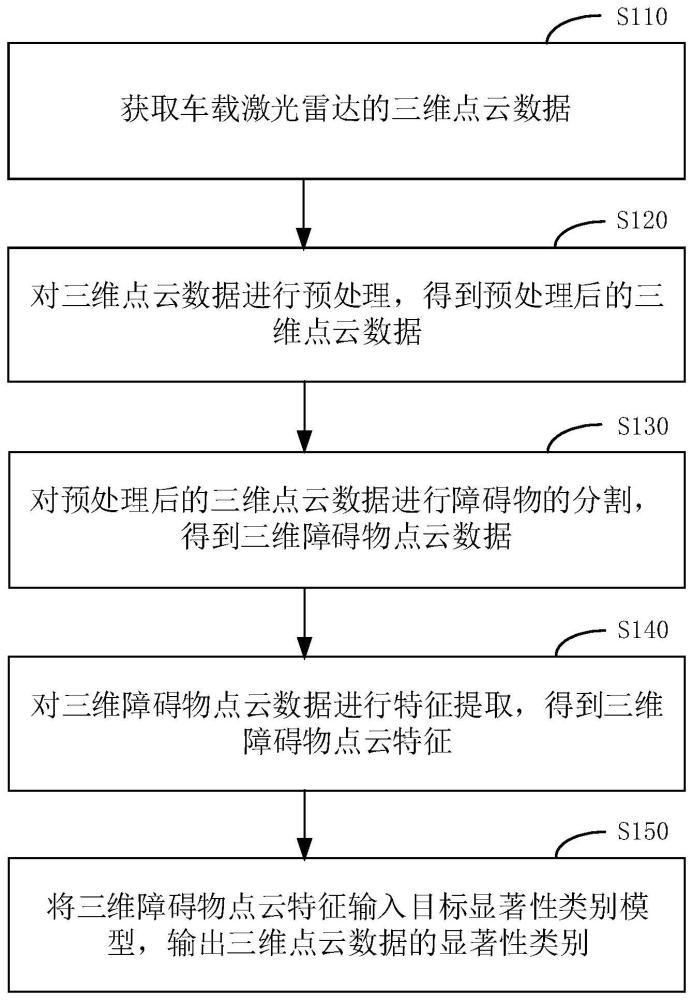
3、获取车载激光雷达的三维点云数据;
4、对所述三维点云数据进行预处理,得到预处理后的三维点云数据;
5、对预处理后的三维点云数据进行障碍物的分割,得到三维障碍物点云数据;
6、对所述三维障碍物点云数据进行特征提取,得到三维障碍物点云特征;
7、将所述三维障碍物点云特征输入目标显著性类别模型,输出所述三维点云数据的显著性类别。
8、可选的,对所述三维点云数据进行预处理,得到预处理后的三维点云数据,包括:
9、对所述三维点云数据按照设定范围进行剪裁,得到剪裁后的三维点云数据;
10、对所述剪裁后的三维点云数据进行滤波处理,得到预处理后的三维点云数据。
11、可选的,对所述三维障碍物点云数据进行特征提取,得到三维障碍物点云特征,包括:
12、对所述三维障碍物点云数据进行聚类处理,得到所述三维障碍物点云数据的聚类结果;
13、对所述三维障碍物点云数据的聚类结果进行包围盒拟合操作,得到三维障碍物点云数据的包围盒;
14、基于所述三维障碍物点云数据的包围盒进行特征提取,得到三维障碍物点云的全局特征。
15、可选的,所述三维障碍物点云的全局特征包括所述三维障碍物点云数据的包围框的尺寸特征、所述三维障碍物点云数据的密度特征及所述三维障碍物点云数据在设定距离内的点数特征。
16、可选的,在获取激光雷达的三维点云数据之前,还包括:
17、构建三维障碍物点云样本数据集和初始显著性类别模型;
18、利用层次分析法确定所述三维障碍物点云样本数据集的每个三维障碍物点云的显著性标签;
19、基于所述三维障碍物点云的显著性标签和所述三维障碍物点云样本数据集对所述初始显著性类别模型进行训练,得到目标显著性类别模型。
20、可选的,基于所述三维障碍物点云的显著性标签和所述三维障碍物点云样本数据集对所述初始显著性类别模型进行训练,得到目标显著性类别模型,包括:
21、对所述三维障碍物点云样本数据集进行归一化处理,得到处理后的三维障碍物点云样本数据集;
22、将处理后的三维障碍物点云样本数据集输入所述初始显著性类别模型进行训练,得到初始输出结果;
23、通过所述初始输出结果和所述三维障碍物点云的显著性标签构建损失函数;
24、基于所述损失函数对所述初始显著性类别模型进行迭代,直至得到目标显著性类别模型。
25、可选的,基于所述损失函数对所述初始显著性类别模型进行迭代,直至得到目标显著性类别模型,包括:
26、通过所述损失函数对所述初始显著性类别模型进行迭代,记录所述初始显著性类别模型的迭代次数;
27、若所述迭代次数超过设定阈值或者所述损失函数满足损失阈值,则得到目标显著性类别模型。
28、根据本发明的另一方面,提供了一种点云数据的处理装置,包括:
29、数据获取模块,用于获取车载激光雷达的三维点云数据;
30、预处理模块,用于对所述三维点云数据进行预处理,得到预处理后的三维点云数据;
31、数据分割模块,用于对预处理后的三维点云数据进行障碍物的分割,得到三维障碍物点云数据;
32、特征提取模块,用于对所述三维障碍物点云数据进行特征提取,得到三维障碍物点云特征;
33、类别输出模块,用于将所述三维障碍物点云特征输入目标显著性类别模型,输出所述三维点云数据的显著性类别。
34、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
35、至少一个处理器;以及
36、与所述至少一个处理器通信连接的存储器;其中,
37、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的点云数据的处理方法。
38、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的点云数据的处理方法。
39、本发明实施例的技术方案,通过获取车载激光雷达的三维点云数据;对所述三维点云数据进行预处理,得到预处理后的三维点云数据;对预处理后的三维点云数据进行障碍物的分割,得到三维障碍物点云数据;对所述三维障碍物点云数据进行特征提取,得到三维障碍物点云特征;将所述三维障碍物点云特征输入目标显著性类别模型,输出所述三维点云数据的显著性类别。本技术方案,利用轻量级的目标显著性类别模型来代替复杂的点云显著性求解过程,在保证一定研判精度的同时大幅度提升计算效率。
40、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种点云数据的处理方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,对所述三维点云数据进行预处理,得到预处理后的三维点云数据,包括:
3.根据权利要求1所述的方法,其特征在于,对所述三维障碍物点云数据进行特征提取,得到三维障碍物点云特征,包括:
4.根据权利要求3所述的方法,其特征在于,所述三维障碍物点云的全局特征包括所述三维障碍物点云数据的包围框的尺寸特征、所述三维障碍物点云数据的密度特征及所述三维障碍物点云数据在设定距离内的点数特征。
5.根据权利要求1所述的方法,其特征在于,在获取激光雷达的三维点云数据之前,还包括:
6.根据权利要求5所述的方法,其特征在于,基于所述三维障碍物点云的显著性标签和所述三维障碍物点云样本数据集对所述初始显著性类别模型进行训练,得到目标显著性类别模型,包括:
7.根据权利要求6所述的方法,其特征在于,基于所述损失函数对所述初始显著性类别模型进行迭代,直至得到目标显著性类别模型,包括:
8.一种点云数据的处理装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的点云数据的处理方法。
技术总结
本发明实施例公开了一种点云数据的处理方法、装置、设备及介质。其中,该方法包括:获取车载激光雷达的三维点云数据;对三维点云数据进行预处理,得到预处理后的三维点云数据;对预处理后的三维点云数据进行障碍物的分割,得到三维障碍物点云数据;对三维障碍物点云数据进行特征提取,得到三维障碍物点云特征;将三维障碍物点云特征输入目标显著性类别模型,输出三维点云数据的显著性类别。本技术方案,利用轻量级的目标显著性类别模型来代替复杂的点云显著性求解过程,在保证一定研判精度的同时大幅度提升计算效率。
技术研发人员:易淑智,罗向东,何伟斌,陈文文,王娴,杨帆,田小东,吴兰,贾恒杰,崔宫,胡玉婷,杨殷
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!