一种基于永磁同步电机的电动汽车路面附着系数估计方法
本发明涉及电动汽车,特别是涉及一种基于永磁同步电机的电动汽车路面附着系数估计方法。
背景技术:
1、随着信息和人工智能技术的进步和发展,分布式驱动电动汽车越来越受到人们的关注,分布式驱动电动汽车具有节能、高效等优点,是目前实现汽车能源转型的重要手段,特别是基于永磁同步电机的分布式驱动电动汽车。其中分布式驱动电动汽车行驶过程中的主动安全控制是核心问题之一。
2、主动安全控制的首要前提是准确获得汽车行驶过程中的路面附着系数,然而路面附着系数无法通过传感器直接测量,因此,如何根据现的传感器来准确的估计难以测量的路面附着系数,是本领域技术人员需要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种基于永磁同步电机的电动汽车路面附着系数估计方法,以实现路面附着系数的有效实时估计。
2、一种基于永磁同步电机的电动汽车路面附着系数估计方法,包括以下步骤:
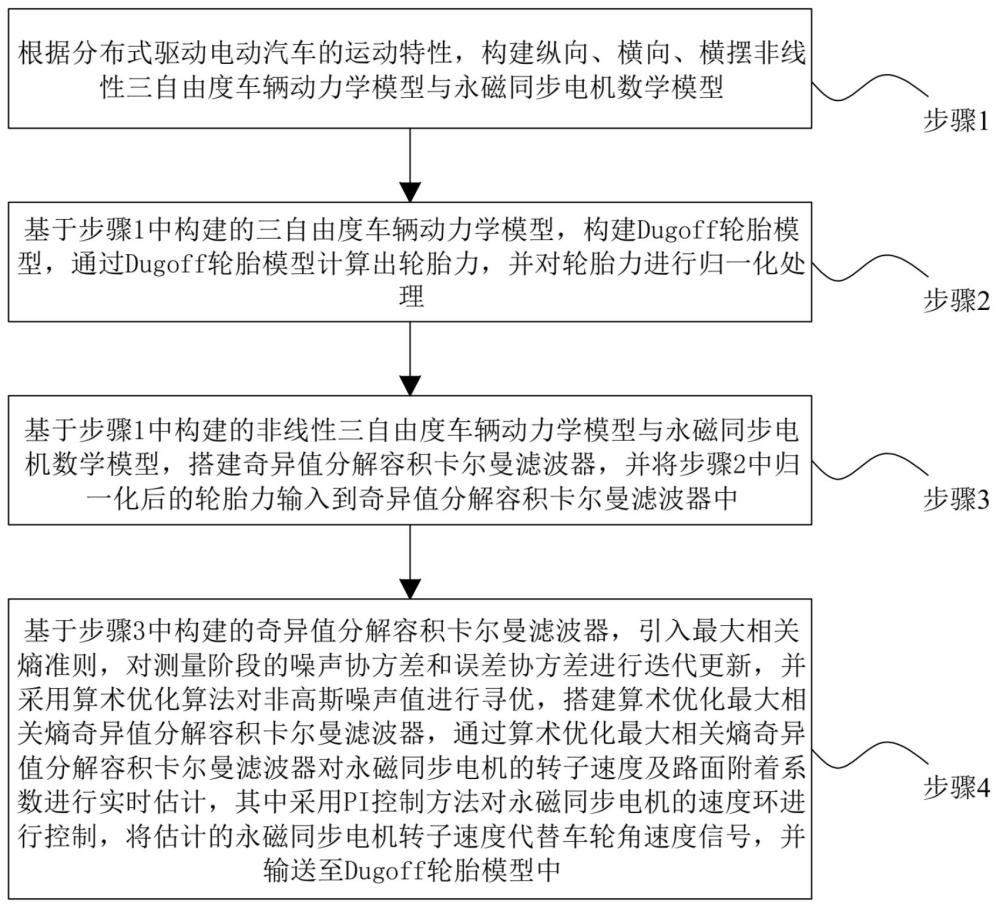
3、步骤1,根据分布式驱动电动汽车的运动特性,构建纵向、横向、横摆非线性三自由度车辆动力学模型与永磁同步电机数学模型;
4、步骤2,基于步骤1中构建的三自由度车辆动力学模型,构建dugoff轮胎模型,通过dugoff轮胎模型计算出轮胎力,并对轮胎力进行归一化处理;
5、步骤3,基于步骤1中构建的非线性三自由度车辆动力学模型与永磁同步电机数学模型,搭建奇异值分解容积卡尔曼滤波器,并将步骤2中归一化后的轮胎力输入到奇异值分解容积卡尔曼滤波器中;
6、步骤4,基于步骤3中构建的奇异值分解容积卡尔曼滤波器,引入最大相关熵准则,对测量阶段的噪声协方差和误差协方差进行迭代更新,并采用算术优化算法对非高斯噪声值进行寻优,搭建算术优化最大相关熵奇异值分解容积卡尔曼滤波器,通过算术优化最大相关熵奇异值分解容积卡尔曼滤波器对永磁同步电机的转子速度及路面附着系数进行实时估计,其中采用pi控制方法对永磁同步电机的速度环进行控制,将估计的永磁同步电机转子速度代替车轮角速度信号,并输送至dugoff轮胎模型中。
7、根据本发明提供的基于永磁同步电机的电动汽车路面附着系数估计方法,具有以下有益效果:
8、1、本发明综合考虑分布式驱动电动汽车的纵向、横向、横摆运动,建立三自由度车辆动力学模型、永磁同步电机数学模型和dugoff模型,并对dugoff模型计算的横纵向轮胎力进行归一化处理,并通过最大相关熵奇异值分解容积卡尔曼滤波器,对永磁同步电机状态信息估计,并将估计的转子速度代替车轮角速度传感器的使用,同步控制分布式驱动电动汽车对路面附着系数进行实时估计;
9、2、不同于一般的奇异值分解容积卡尔曼滤波算法,本发明采用算术优化最大相关熵奇异值分解容积卡尔曼滤波器,根据建立的汽车动力学系统模型,永磁同步电机数学模型与轮胎模型对路面附着系数进行实时估计,考虑多工况下行驶的分布式驱动电动汽车动力学模型是一个非线性的系统,传统的奇异值分解容积卡尔曼滤波算法抵抗非高斯噪声能力差,估计精度不高,因此,本发明在奇异值分解容积卡尔曼滤波的基础上,引入最大相关熵准则和算术智能优化算法,增强滤波器抵抗非高斯噪声的能力,能够有效提高估计精度,具有较广的适用性和良好的鲁棒性。
技术特征:
1.一种基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,步骤1中,构建的纵向、横向、横摆非线性三自由度车辆动力学模型的表达式如下:
3.根据权利要求2所述的基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,步骤1中,构建的永磁同步电机数学模型在d-q坐标系下的表达式为:
4.根据权利要求3所述的基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,步骤2具体包括:
5.根据权利要求4所述的基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,步骤3中,搭建奇异值分解容积卡尔曼滤波器具体包括:
6.根据权利要求5所述的基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,步骤4具体包括:
7.根据权利要求6所述的基于永磁同步电机的电动汽车路面附着系数估计方法,其特征在于,步骤4中,采用pi控制方法对永磁同步电机的速度环进行控制,将估计的永磁同步电机转子速度代替车轮角速度信号,并输送至dugoff轮胎模型中,pi控制方法的控制误差为:
技术总结
本发明提供一种基于永磁同步电机的电动汽车路面附着系数估计方法,该方法先构建纵向、横向、横摆非线性三自由度车辆动力学模型与永磁同步电机数学模型,并构建Dugoff轮胎模型,通过Dugoff轮胎模型计算出轮胎力,并对Dugoff轮胎模型计算的轮胎力进行归一化处理,然后搭建奇异值分解容积卡尔曼滤波器,最后引入最大相关熵准则,对测量阶段的噪声协方差和误差协方差进行迭代更新,并采用算术优化算法对非高斯噪声值进行寻优,搭建算术优化最大相关熵奇异值分解容积卡尔曼滤波器,通过算术优化最大相关熵奇异值分解容积卡尔曼滤波器对永磁同步电机的转子速度及路面附着系数进行实时估计,能够实现路面附着系数的有效实时估计。
技术研发人员:陈齐平,于炳浩,钟秤平,江志强,游道亮,陈清爽,徐仕华,钟颖强,吴昊,蔡元昊
受保护的技术使用者:华东交通大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!