基于建筑基底矢量数据生成城市建筑场景的方法及装置与流程
本发明属于城市建模,具体涉及一种基于建筑基底矢量数据生成城市建筑场景的方法及装置。
背景技术:
1、城市建筑场景是一种能够非常直观体现城市建筑和场景的模型,极大程度上方便了对城市建筑进行研究,而现有技术中城市建筑场景的生成主要分为两种,一种是对建筑基底矢量进行三角剖分,通过建筑矢量中的建筑高程、楼高等属性生成建筑模型底面、顶面、侧面的三角网格,缺点是生成的是没有纹理贴图的建筑素模,视觉效果不美观,缺少真实感,另一种是人工使用3dmax、maya等建模软件手工制作模型,并为模型制作纹理贴图,这种方式的优点是能生成接近真实的模型,缺点是建模效率低,无法满足海量建筑场景的生成需要。
2、因此,如何快速准确地生成美观、真实的城市建筑场景,是本领域技术人员有待解决的技术问题。
技术实现思路
1、本发明的目的是为了解决现有技术中无法快速准确生成真实的城市建筑场景的技术问题。
2、为实现上述技术目的,一方面本发明提供了一种基于建筑基底矢量数据生成城市建筑场景的方法,该方法包括:
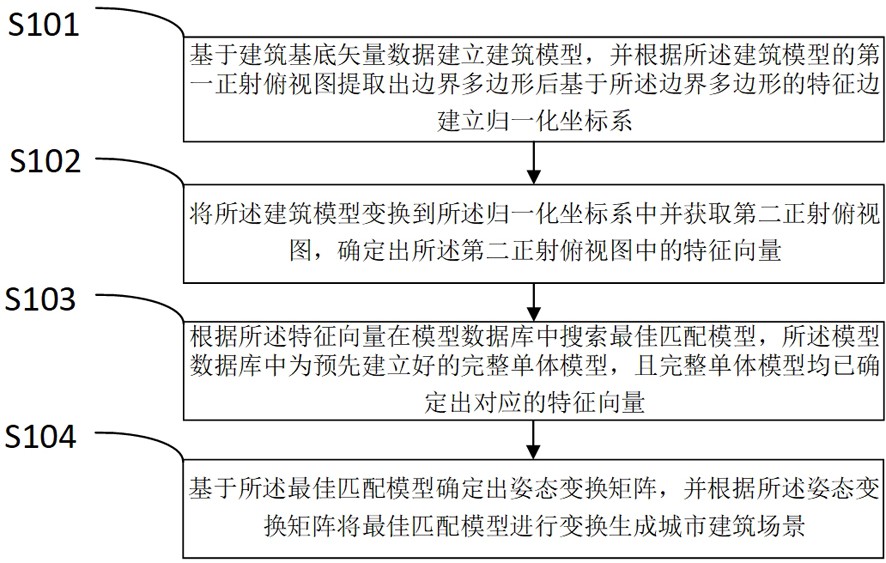
3、基于建筑基底矢量数据建立建筑模型,并根据所述建筑模型的第一正射俯视图提取出边界多边形后基于所述边界多边形的特征边建立归一化坐标系;
4、将所述建筑模型变换到所述归一化坐标系中并获取第二正射俯视图,确定出所述第二正射俯视图中的特征向量;
5、根据所述特征向量在模型数据库中搜索最佳匹配模型,所述模型数据库中为预先建立好的完整单体模型,且完整单体模型均已确定出对应的特征向量;
6、基于所述最佳匹配模型确定出姿态变换矩阵,并根据所述姿态变换矩阵将最佳匹配模型进行变换生成城市建筑场景。
7、进一步地,所述第一正射俯视图,具体由如下步骤确定:
8、确定所述建筑模型的轴对齐包围盒;
9、将所述建筑模型进行去中心化处理,所述去中心化处理具体包括将所述建筑模型的顶点坐标减去所述轴对齐包围盒中心点坐标;
10、以所述轴对齐包围盒顶面中心点坐标为相机点获取去中心化处理后建筑模型的第一正射俯视图。
11、进一步地,所述边界多边形的特征边具体通过如下步骤确定:
12、在所述边界多边形内部按照预设间距采样点云;
13、将采样出的点云提取出第一主方向和第二主方向;
14、将所述轴对齐包围盒中心点坐标为原点,第一主方向为x轴,第二主方向为y轴建立局部坐标系;
15、确定所述边界多边形在所述第一主方向和第二主方向的第一方向长度和第二方向长度;
16、将所述第一方向长度和第二方向长度中最长的方向长度的一半作为特征阈值;
17、将所述边界多边形中超过所述特征阈值的边作为特征边。
18、进一步地,所述方法还包括,若所述边界多边形中不存在超过特征阈值的边,则将所述边界多边形绕所述轴对齐包围盒中心点旋转预设角度后再次确定特征边。
19、进一步地,所述归一化坐标系是以所述特征边的方向为x轴,特征边的垂直方向为y轴、建筑模型中心点为原点建立的。
20、进一步地,所述确定出所述第二正射俯视图中的特征向量,具体包括:
21、将所述第二正射俯视图进行二值化处理得到二值图;
22、确定所述二值图的最小外接圆,并以圆心为同心确定多个等距的圆;
23、将得到的所有圆按相同角度进行划分后得到多个封闭区域;
24、将每一个封闭区域均作为所述特征向量。
25、进一步地,所述根据所述特征向量在模型数据库中搜索最佳匹配模型,具体包括:
26、在所述模型数据库中确定出与所述建筑模型的长宽高的比值在预设比值范围内的完整单体模型并将其作为候选模型,然后将所有候选模型组合为初步匹配模型集合;
27、遍历所述初步匹配模型集合中候选模型的特征向量与所述建筑模型的特征向量之间欧式距离小于预设距离的候选模型,并将其作为待确定模型组合为待确定集合;
28、将所述待确定集合中与所述建筑模型归一化相关系数最大的待确定模型作为所述最佳匹配模型。
29、进一步地,所述姿态变换矩阵根据如下公式进行确定:
30、,
31、,
32、,
33、,
34、式中,为姿态变换矩阵,为最佳匹配模型对应的归一化坐标系的矩阵,为缩放矩阵,为建筑模型对应的归一化坐标系的逆矩阵,为x轴y轴方向的缩放系数,为z轴方向的缩放系数,为建筑模型的宽度,为建筑模型的长度,为最佳匹配模型的宽度,为最佳匹配模型的长度,为建筑模型的高度,为最佳匹配模型的高度。
35、另一方面,本发明还提供了一种基于建筑基底矢量数据生成城市建筑场景的装置,所述装置包括:
36、建立模块,用于基于建筑基底矢量数据建立建筑模型,并根据所述建筑模型的第一正射俯视图提取出边界多边形后基于所述边界多边形的特征边建立归一化坐标系;
37、确定模块,用于将所述建筑模型变换到所述归一化坐标系中并获取第二正射俯视图,确定出所述第二正射俯视图中的特征向量;
38、搜索模块,用于根据所述特征向量在模型数据库中搜索最佳匹配模型,所述模型数据库中为预先建立好的完整单体模型,且完整单体模型均已确定出对应的特征向量;
39、变换模块,用于基于所述最佳匹配模型确定出姿态变换矩阵,并根据所述姿态变换矩阵将最佳匹配模型进行变换生成城市建筑场景。
40、本发明提供的一种基于建筑基底矢量数据生成城市建筑场景的方法及装置,与现有技术相比,本方法基于建筑基底矢量数据建立建筑模型,并根据所述建筑模型的第一正射俯视图提取出边界多边形后基于所述边界多边形的特征边建立归一化坐标系;将所述建筑模型变换到所述归一化坐标系中并获取第二正射俯视图,确定出所述第二正射俯视图中的特征向量;根据所述特征向量在模型数据库中搜索最佳匹配模型,所述模型数据库中为预先建立好的完整单体模型,且完整单体模型均已确定出对应的特征向量;基于所述最佳匹配模型确定出姿态变换矩阵,并根据所述姿态变换矩阵将最佳匹配模型进行变换生成城市建筑场景。避免了人工操作,实现了快速准确地生成美观、真实的城市建筑场景。
技术特征:
1.一种基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述方法包括:
2.如权利要求1所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述第一正射俯视图,具体由如下步骤确定:
3.如权利要求1所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述边界多边形的特征边具体通过如下步骤确定:
4.如权利要求3所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述方法还包括,若所述边界多边形中不存在超过特征阈值的边,则将所述边界多边形绕所述轴对齐包围盒中心点旋转预设角度后再次确定特征边。
5.如权利要求1所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述归一化坐标系是以所述特征边的方向为x轴,特征边的垂直方向为y轴、建筑模型中心点为原点建立的。
6.如权利要求1所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述确定出所述第二正射俯视图中的特征向量,具体包括:
7.如权利要求1所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述根据所述特征向量在模型数据库中搜索最佳匹配模型,具体包括:
8.如权利要求1所述的基于建筑基底矢量数据生成城市建筑场景的方法,其特征在于,所述姿态变换矩阵根据如下公式进行确定:
9.一种基于建筑基底矢量数据生成城市建筑场景的装置,其特征在于,所述装置包括:
技术总结
本发明公开了一种基于建筑基底矢量数据生成城市建筑场景的方法及装置,该方法包括:基于建筑基底矢量数据建立建筑模型,并根据所述建筑模型的第一正射俯视图提取出边界多边形后基于所述边界多边形的特征边建立归一化坐标系;将所述建筑模型变换到所述归一化坐标系中并获取第二正射俯视图,确定出所述第二正射俯视图中的特征向量;根据所述特征向量在模型数据库中搜索最佳匹配模型,所述模型数据库中为预先建立好的完整单体模型,且完整单体模型均已确定出对应的特征向量;基于最佳匹配模型确定出姿态变换矩阵,并根据所述姿态变换矩阵将最佳匹配模型进行变换生成城市建筑场景。避免了人工操作,实现了快速准确地生成美观、真实的城市建筑场景。
技术研发人员:朱旭平,何文武,宋彬,王雪
受保护的技术使用者:北京飞渡科技股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!