一种水下传感器数据采集方法、介质及系统与流程
本发明属于水下传感器,具体而言,涉及一种水下传感器数据采集方法、介质及系统。
背景技术:
1、水下传感器是一种专门设计用于水下监测的设备,它们在许多领域都发挥着重要的作用。比如,它们可以用于海洋学研究、环境监测、水产养殖、水下考古、石油开采等领域。水下传感器的主要作用包括测量水温、水压、水流速度、水流方向、水的化学成分(如溶解氧、酸碱度、盐度等)、水下生物(如鱼类、浮游生物等)的数量和分布、水下地形、水下结构物的状况等。目前,水下传感器网络的布置主要依赖专家经验进行手工布放,这种人工经验方法存在如下问题:经验布放容易造成监测盲区,一些重要区域无法被很好地覆盖,导致监测数据不精确。存在资源浪费现象,重要度不高的区域布放了过多冗余传感器,增加了系统成本。也就是说,现有技术在水下传感器数据采集过程中,对水下部署传感器一般依靠人工经验,导致存在传感器部署较密集导致采集范围小,或过少,导致采集的精度不够的技术问题。
技术实现思路
1、有鉴于此,本发明提供一种水下传感器数据采集方法、介质及系统,能够解决当前针对水下传感器数据采集过程中,水下部署传感器一般依靠人工经验,导致存在传感器部署较密集导致采集范围小,或过少,导致采集的精度不够的技术问题。
2、本发明是这样实现的:
3、本发明的第一方面提供一种水下传感器数据采集方法,其中,包括以下步骤:
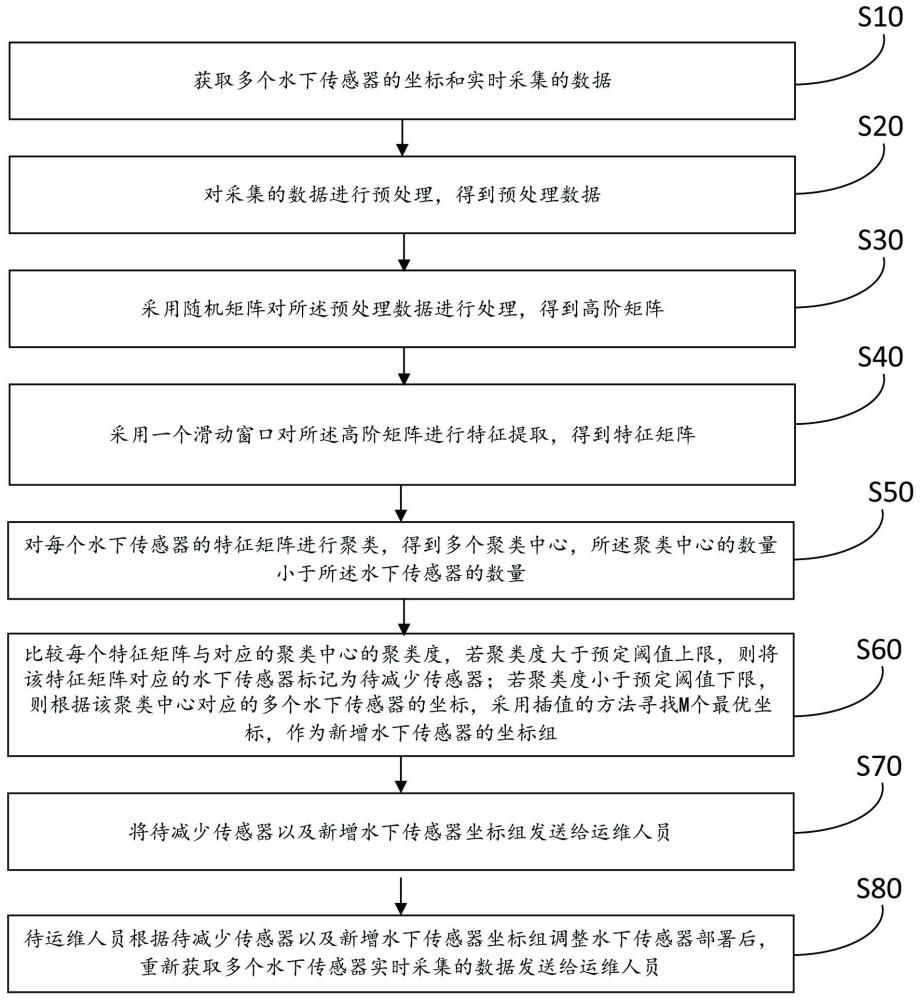
4、s10、获取多个水下传感器的坐标和实时采集的数据,包括坐标、水温、盐度;
5、s20、对采集的数据进行预处理,得到预处理数据;
6、s30、采用随机矩阵对所述预处理数据进行处理,得到高阶矩阵;
7、s40、采用一个滑动窗口对所述高阶矩阵进行特征提取,得到特征矩阵;
8、s50、对每个水下传感器的特征矩阵进行聚类,得到多个聚类中心,所述聚类中心的数量小于所述水下传感器的数量;
9、s60、比较每个特征矩阵与对应的聚类中心的聚类度,若聚类度大于预定阈值上限,则将该特征矩阵对应的水下传感器标记为待减少传感器;若聚类度小于预定阈值下限,则根据该聚类中心对应的多个水下传感器的坐标,采用插值的方法寻找m个最优坐标,作为新增水下传感器的坐标组,其中m大于等于1;
10、s70、将待减少传感器以及新增水下传感器坐标组发送给运维人员;
11、s80、待运维人员根据待减少传感器以及新增水下传感器坐标组调整水下传感器部署后,重新获取多个水下传感器实时采集的数据发送给运维人员。
12、在上述技术方案的基础上,本发明的一种水下传感器数据采集方法还可以做如下改进:
13、其中,所述获取多个水下传感器的坐标和实时采集的数据,包括坐标、水温、盐度的步骤具体包括:根据水下传感器的部署位置,预先记录每个传感器的空间坐标;每个水下传感器以一定时间间隔采集当前位置的水质数据,包括水温和盐度;将各传感器的空间坐标和对应时间点的水质数据匹配起来,形成数据集。
14、其中,所述对采集的数据进行预处理,得到预处理数据的步骤具体包括:检测每个传感器的数据是否在正常范围内,去除错误和离群数据;对于个别传感器由于设备故障导致没有读取到的数据,通过邻近传感器的读数进行空间插值计算,填充缺失的数据;对每个传感器的数据进行时间序列平滑滤波,去除测量噪声;将水温和盐度数据归一化,映射到0-1之间。
15、其中,所述采用随机矩阵对所述预处理数据进行处理,得到高阶矩阵的步骤具体包括:构建一个m×n的随机矩阵,其中m是时间序列长度,n是传感器数;将预处理后的数据集与随机矩阵进行矩阵点积运算,结果得到一个m×n的高阶矩阵;重复上述过程多次,得到多组高阶矩阵,并将这些高阶矩阵拼接在第三维上,形成一个三维矩阵。
16、其中,所述采用一个滑动窗口对所述高阶矩阵进行特征提取,得到特征矩阵的步骤具体包括:设置滑动窗口大小;对每个窗口的数据,提取统计特征;重复上述过程,最终得到每个传感器在各个时间窗口上的统计特征。
17、其中,所述对每个水下传感器的特征矩阵进行聚类,得到多个聚类中心的步骤具体包括:将所有传感器的特征矩阵拼接到一起,进行k-means聚类算法;设置聚类中心个数k为传感器总数的一定比例;k-means聚类迭代收敛后,得到k个聚类中心及各中心对应的类簇。
18、其中,所述比较每个特征矩阵与对应的聚类中心的聚类度,进行待减少和待增加传感器判定的步骤具体包括:计算每个传感器特征矩阵与对应聚类中心的欧式距离;设定聚类度阈值,距离若大于阈值上限,则标记该传感器为待减少;距离若小于阈值下限,则在该类簇内标记需要新增传感器;对于需要新增的传感器,采用反距离插值法计算出新的坐标点作为新增传感器点。
19、进一步的,所述预定阈值的上限为0.8,下限为0.4。
20、本发明的第二方面提供一种计算机可读存储介质,其中,所述计算机可读存储介质中存储有程序指令,所述程序指令运行时,用于执行上述的一种水下传感器数据采集方法。
21、本发明的第三方面提供一种水下传感器数据采集系统,其中,包含上述的计算机可读存储介质。
22、与现有技术相比较,本发明提供的一种水下传感器数据采集方法、介质及系统的有益效果是:可以智能识别布放密集区域中的冗余传感器,提示减少传感器数量,有效节约资源。可以智能发现监测漏洞区域,提示新增传感器位置,提升监测覆盖面。可以根据水体环境变化,持续对网络布局进行优化,而不是单次静态布放。解决了当前针对水下传感器数据采集过程中,在水下部署传感器一般依靠人工经验,导致存在传感器部署较密集导致采集范围小,或过少,导致采集的精度不够的技术问题。
技术特征:
1.一种水下传感器数据采集方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种水下传感器数据采集方法,其特征在于,所述获取多个水下传感器的坐标和实时采集的数据,包括坐标、水温、盐度的步骤具体包括:根据水下传感器的部署位置,预先记录每个传感器的空间坐标;每个水下传感器以一定时间间隔采集当前位置的水质数据,包括水温和盐度;将各传感器的空间坐标和对应时间点的水质数据匹配起来,形成数据集。
3.根据权利要求1所述的一种水下传感器数据采集方法,其特征在于,所述对采集的数据进行预处理,得到预处理数据的步骤具体包括:检测每个传感器的数据是否在正常范围内,去除错误和离群数据;对于个别传感器由于设备故障导致没有读取到的数据,通过邻近传感器的读数进行空间插值计算,填充缺失的数据;对每个传感器的数据进行时间序列平滑滤波,去除测量噪声;将水温和盐度数据归一化,映射到0-1之间。
4.根据权利要求1所述的一种水下传感器数据采集方法,其特征在于,所述采用随机矩阵对所述预处理数据进行处理,得到高阶矩阵的步骤具体包括:构建一个m×n的随机矩阵,其中m是时间序列长度,n是传感器数;将预处理后的数据集与随机矩阵进行矩阵点积运算,结果得到一个m×n的高阶矩阵;重复上述过程多次,得到多组高阶矩阵,并将这些高阶矩阵拼接在第三维上,形成一个三维矩阵。
5.根据权利要求1所述的一种水下传感器数据采集方法,其特征在于,所述采用一个滑动窗口对所述高阶矩阵进行特征提取,得到特征矩阵的步骤具体包括:设置滑动窗口大小;对每个窗口的数据,提取统计特征;重复上述过程,最终得到每个传感器在各个时间窗口上的统计特征。
6.根据权利要求1所述的一种水下传感器数据采集方法,其特征在于,所述对每个水下传感器的特征矩阵进行聚类,得到多个聚类中心的步骤具体包括:将所有传感器的特征矩阵拼接到一起,进行k-means聚类算法;设置聚类中心个数k为传感器总数的一定比例;k-means聚类迭代收敛后,得到k个聚类中心及各中心对应的类簇。
7.根据权利要求1所述的一种水下传感器数据采集方法,其特征在于,所述比较每个特征矩阵与对应的聚类中心的聚类度,进行待减少和待增加传感器判定的步骤具体包括:计算每个传感器特征矩阵与对应聚类中心的欧式距离;设定聚类度阈值,距离若大于阈值上限,则标记该传感器为待减少;距离若小于阈值下限,则在对应的类的簇内标记需要新增传感器;对于需要新增的传感器,采用反距离插值法计算出新的坐标点作为新增传感器点。
8.根据权利要求1-7任一项所述的一种水下传感器数据采集方法,其特征在于,所述预定阈值的上限为0.8,下限为0.4。
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序指令,所述程序指令运行时,用于执行权利要求1-8任一项所述的一种水下传感器数据采集方法。
10.一种水下传感器数据采集系统,其特征在于,包含权利要求9所述的计算机可读存储介质。
技术总结
本发明提供了一种水下传感器数据采集方法、介质及系统,属于水下传感器技术领域,包括:获取多个水下传感器的坐标和实时采集的数据并预处理得到预处理数据;采用随机矩阵对所述预处理数据进行处理,得到高阶矩阵;采用一个滑动窗口对所述高阶矩阵进行特征提取,得到特征矩阵;对每个水下传感器的特征矩阵进行聚类,得到多个聚类中心,所述聚类中心的数量小于所述水下传感器的数量;计算待减少传感器以及新增水下传感器坐标组并发送给运维人员;重新采集数据。解决了当前针对水下传感器数据采集过程中,传感器部署依靠人工经验,存在传感器部署较密集导致采集范围小,或过少导致采集的精度不够的技术问题。
技术研发人员:张国豪
受保护的技术使用者:青岛道万科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!