一种街道清洁度分析方法、装置、计算机设备及存储介质与流程
本发明涉及图像处理,尤其涉及一种街道清洁度分析方法、装置、计算机设备及存储介质。
背景技术:
1、在城镇化程度日益提升的背景下,为市民提供高效、精准的基础服务能力,营造良好的生活环境,是彰显城市服务能力的重要指标。在众多服务能力中,其中城市环卫服务是最基础,市民感受最明显的服务内容。
2、当前城市环卫服务方式大致分为3类,第一类是人工服务,通常传统城市环卫服务采用人工巡查、实时处理的方法,灵活性高但效率较为低下;第二类是无人清扫车,解决了效率低下问题,但无法处理一些特殊情形,如绿化带、花坛内等异常地形中的暴露垃圾等,以及针对较大的垃圾,无法处理;第三类是结合上述2类情形,采用机器巡查、人工派单处理的模式。但第三类方式的分析仍然不够精细,且需由后台人工进行分类。
技术实现思路
1、本发明的目的是提供一种街道清洁度分析方法、装置、计算机设备及存储介质,旨在解决现有街道路边清洁度分析不够精细且需人工进行分类的问题。
2、第一方面,本发明实施例提供一种街道清洁度分析方法,包括:
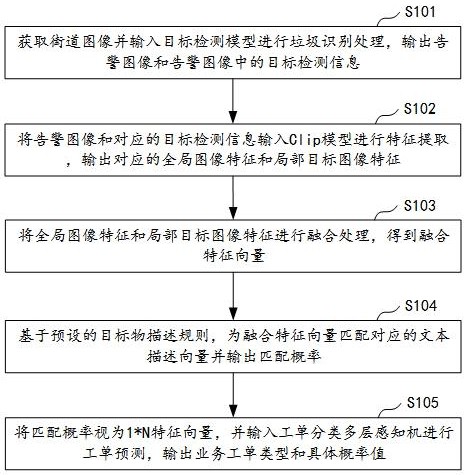
3、获取街道图像并输入目标检测模型进行垃圾识别处理,输出告警图像和所述告警图像中的目标检测信息;
4、将所述告警图像和对应的目标检测信息输入clip模型进行特征提取,输出对应的全局图像特征和局部目标图像特征;
5、将所述全局图像特征和局部目标图像特征进行融合处理,得到融合特征向量;
6、基于预设的目标物描述规则,为所述融合特征向量匹配对应的文本描述向量并输出匹配概率;
7、将所述匹配概率视为1*n特征向量,并输入工单分类多层感知机进行工单预测,输出业务工单类型和具体概率值。
8、第二方面,本发明实施例提供一种街道清洁度分析装置,包括:
9、识别单元,用于获取街道图像并输入目标检测模型进行垃圾识别处理,输出告警图像和所述告警图像中的目标检测信息;
10、特征提取单元,用于将所述告警图像和对应的目标检测信息输入clip模型进行特征提取,输出对应的全局图像特征和局部目标图像特征;
11、特征融合单元,用于将所述全局图像特征和局部目标图像特征进行融合处理,得到融合特征向量;
12、匹配单元,用于基于预设的目标物描述规则,为所述融合特征向量匹配对应的文本描述向量并输出匹配概率;
13、预测单元,用于将所述匹配概率视为1*n特征向量,并输入工单分类多层感知机进行工单预测,输出业务工单类型和具体概率值。
14、第三方面,本发明实施例提供了一种计算机设备,其包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的街道清洁度分析方法。
15、第四方面,本发明实施例提供了一种计算机可读存储介质,其中所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行上述第一方面所述的街道清洁度分析方法。
16、本发明实施例公开了一种街道清洁度分析方法、装置、计算机设备及存储介质。该方法包括:获取街道图像并输入目标检测模型进行垃圾识别处理,输出告警图像和告警图像中的目标检测信息;将告警图像和对应的目标检测信息输入clip模型进行特征提取,输出对应的全局图像特征和局部目标图像特征;将全局图像特征和局部目标图像特征进行融合处理,得到融合特征向量;基于预设的目标物描述规则,为融合特征向量匹配对应的文本描述向量并输出匹配概率;将匹配概率视为1*n特征向量,并输入工单分类多层感知机进行工单预测,输出业务工单类型和具体概率值。本发明实施例可对街道路面实时进行垃圾数量、类型、位置等智能分析,并且可以根据分析结果自动向不同工序的环卫人员派发对应清洁工单,有效提升城市环卫服务标准化水平,提高作业效率。
技术特征:
1.一种街道清洁度分析方法,其特征在于,包括:
2.根据权利要求1所述的街道清洁度分析方法,其特征在于,所述获取街道图像并输入目标检测模型进行垃圾识别处理,输出告警图像和所述告警图像中的目标检测信息,包括:
3.根据权利要求1所述的街道清洁度分析方法,其特征在于,所述将所述告警图像和对应的目标检测信息输入clip模型进行特征提取,输出对应的全局图像特征和局部目标图像特征,包括:
4.根据权利要求1所述的街道清洁度分析方法,其特征在于,所述将所述全局图像特征和局部目标图像特征进行融合处理,得到融合特征向量,包括:
5.根据权利要求1所述的街道清洁度分析方法,其特征在于,所述基于预设的目标物描述规则,为所述融合特征向量匹配对应的文本描述向量并输出匹配概率,包括:
6.根据权利要求5所述的街道清洁度分析方法,其特征在于,所述将所述融合特征向量与文本描述特征向量库进行范数归一化处理,再进行点积操作后输入sigmoid层,得到所述融合特征向量在文本描述特征向量库中与各个文本描述特征向量的匹配概率,包括:
7.根据权利要求6所述的街道清洁度分析方法,其特征在于,所述将所述匹配概率视为1*n特征向量,并输入工单分类多层感知机进行工单预测,输出业务工单类型和具体概率值,包括:
8.一种街道清洁度分析装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的街道清洁度分析方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1至7任一项所述的街道清洁度分析方法。
技术总结
本发明公开了一种街道清洁度分析方法、装置、计算机设备及存储介质。该方法包括:获取街道图像并输入目标检测模型进行垃圾识别处理,输出告警图像和告警图像中的目标检测信息;将告警图像和对应的目标检测信息输入Clip模型进行特征提取,输出对应的全局图像特征和局部目标图像特征;将全局图像特征和局部目标图像特征进行融合处理,得到融合特征向量;基于预设的目标物描述规则,为融合特征向量匹配对应的文本描述向量并输出匹配概率;将匹配概率视为1*N特征向量,并输入工单分类多层感知机进行工单预测,输出业务工单类型和具体概率值。本发明可对街道路面实时进行垃圾数量、类型、位置等智能分析,提升了城市环卫服务标准化水平和作业效率。
技术研发人员:刘子伟,姚钊盈,王俊宜,林伯明
受保护的技术使用者:深圳市万物云科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!