一种无人机巡航图像处理系统及方法与流程
本发明涉及图像处理,特别涉及一种无人机巡航图像处理系统及方法。
背景技术:
1、无人机巡航可以应用于交通场景、通信基站、输电线路、抗震救灾等方面的监控和分析,如何提高无人机巡航图像处理分析的精确度一直是研究的要点。
2、现有技术中,专利公开号为cn114640853a的《一种无人机巡航图像处理系统》能够根据图像处理模块从监控中心接收到反馈信息的频率,适应性的调节对待传输图像的不同区域的压缩程度,并根据图像采集模块接收到反馈信息的频率,确定图片的采集频率,从而适应性地提供压缩后的传输图像到监控中心,从而识别出图像中所存在的更多有效信息,并使监控中心能够尽快接收到包含更多有效信息的图像。
3、在无人机巡航过程中,可能出现的异常情况包括静态异常和动态异常(譬如在交通场景中,静态异常包括已发生的交通事故,动态异常包括异常车速、交通堵塞情况等;又譬如在输电线路中,静态异常包括线缆损伤、杆塔倾斜,动态异常包括线缆舞动等),因此在对巡航图像进行处理时,需对静态情况和动态情况进行综合考虑,然而,上述现有技术通过差分和叠加的方法实现图像压缩,仅考虑了动态情况,而忽略了静态情况可能存在的隐患,导致后续图像分析的准确性和全面性较差。
技术实现思路
1、本发明提供了一种无人机巡航图像处理系统及方法,用以解决现有技术中没有比较可靠的针对图像处理分析的准确性和全面性较差的问题。
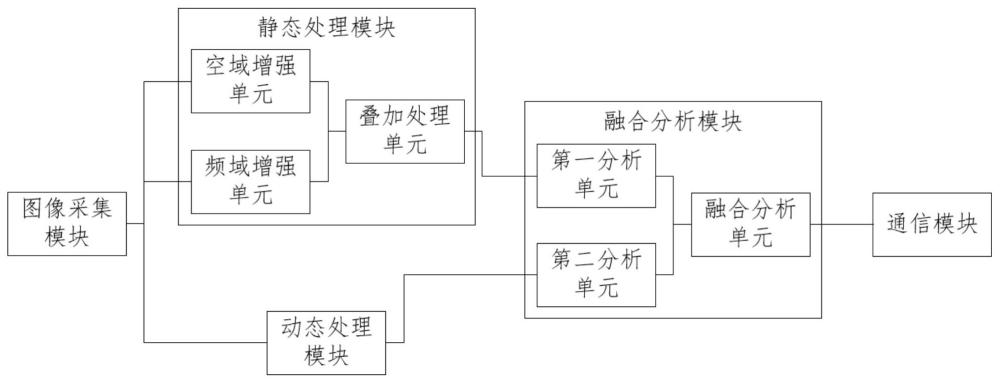
2、一方面,本发明提供了一种无人机巡航图像处理系统,包括:图像采集模块、静态处理模块、动态处理模块、融合分析模块和通信模块。
3、所述图像采集模块用于采集图像数据。
4、所述静态处理模块用于对所述图像数据进行静态处理,得到第一处理图像数据。
5、所述动态处理模块用于对所述图像数据进行动态处理,得到第二处理图像数据。
6、所述融合分析模块用于对所述第一处理图像数据和所述第二处理图像数据进行融合分析,得到融合分析数据。
7、所述通信模块用于将所述融合分析数据发送给远程监控中心。
8、在一种可能的实现方式中,所述静态处理模块包括:空域增强单元、频域增强单元和叠加处理单元。
9、所述空域增强单元用于对所述图像数据进行空域增强,得到空域增强图像数据。
10、所述频域增强单元用于对所述图像数据进行频域增强,得到频域增强图像数据。
11、所述叠加处理单元用于对所述空域增强图像数据和所述频域增强图像数据进行叠加处理,得到所述第一处理图像数据。
12、在一种可能的实现方式中,所述静态处理模块采用双通道神经网络。
13、所述空域增强单元和所述频域增强单元各属于双通道神经网络的一个通道,分别用于输出空域增强图像数据和频域增强图像数据。
14、所述叠加处理单元属于两通道各自输出层后的又一输出层,用于对两通道输出进行叠加处理输出,得到所述第一处理图像数据。
15、在一种可能的实现方式中,所述静态处理模块采用三通道神经网络。
16、所述空域增强单元和所述频域增强单元各属于三通道神经网络的一个通道,分别用于输出空域增强图像数据和频域增强图像数据;第三通道为输入分支通道,用于输出所述图像数据。
17、所述叠加处理单元属于三通道各自输出层后的又一输出层,用于对三通道输出进行叠加处理输出,得到所述第一处理图像数据。
18、在一种可能的实现方式中,所述动态处理模块采用帧间差分法对所述图像数据进行动态处理,得到所述第二处理图像数据。
19、在一种可能的实现方式中,所述融合分析模块包括:第一分析单元、第二分析单元和融合分析单元。
20、所述第一分析单元用于对所述第一处理图像数据进行第一分析,得到第一分析数据。
21、所述第二分析单元用于对所述第二处理图像数据进行第二分析,得到第二分析数据。
22、所述融合分析单元用于对所述第一分析数据和所述第二分析数据进行融合分析,得到所述融合分析数据。
23、在一种可能的实现方式中,所述融合分析模块采用双分支神经网络对所述第一处理图像数据和所述第二处理图像数据进行融合分析。
24、所述第一分析单元和所述第二分析单元各属于双分支神经网络的一个分支,分别用于输出第一分析数据和第二分析数据。
25、所述融合分析单元属于两分支各自输出层后的又一输出层,用于对两分支输出进行融合分析输出,得到所述融合分析数据。
26、在一种可能的实现方式中,所述图像采集模块还用于根据所述融合分析数据调整采集图像数据的频率。
27、在一种可能的实现方式中,所述通信模块用于在所述融合分析数据超过预设阈值时将所述融合分析数据和对应的图像数据发送给远程监控中心。
28、一方面,本发明提供了一种无人机巡航图像处理方法,包括以下步骤:
29、步骤一,采集图像数据。
30、步骤二,对所述图像数据进行静态处理,得到第一处理图像数据。
31、步骤三,对所述图像数据进行动态处理,得到第二处理图像数据。
32、步骤四,对所述第一处理图像数据和所述第二处理图像数据进行融合分析,得到融合分析数据。
33、步骤五,将所述融合分析数据发送给远程监控中心。
34、本发明中的一种无人机巡航图像处理系统及方法,具有以下优点:
35、通过对图像数据进行静态处理、动态处理和融合分析,提高了图像处理分析的准确性和全面性;提出的空域增强单元、频域增强单元和叠加处理单元,通过对图像数据进行空域增强、频域增强和叠加处理,提高了图像的静态特征识别度;提出的静态处理模块采用三通道神经网络,第三通道为输入分支通道,用于输出图像数据,叠加处理单元属于三通道各自输出层后的又一输出层,用于对三通道输出进行叠加处理输出,通过第三通道保留原图像数据,避免了空域增强过度或频域增强过度时的特征损失;提出的第一分析单元、第二分析单元和融合分析单元,通过对第一处理图像数据和第二处理图像数据进行融合分析,提高了图像分析精确度;提出的图像采集模块还用于根据融合分析数据调整采集图像数据的频率,提高了图像采集的可适应性,节省了存储空间;提出的通信模块用于在融合分析数据超过预设阈值时将融合分析数据和对应的图像数据发送给远程监控中心,提高了图像传输有效性。
技术特征:
1.一种无人机巡航图像处理系统,其特征在于,包括:图像采集模块、静态处理模块、动态处理模块、融合分析模块和通信模块;
2.根据权利要求1所述的一种无人机巡航图像处理系统,其特征在于,所述静态处理模块包括:空域增强单元、频域增强单元和叠加处理单元;
3.根据权利要求2所述的一种无人机巡航图像处理系统,其特征在于,所述静态处理模块采用双通道神经网络;
4.根据权利要求2所述的一种无人机巡航图像处理系统,其特征在于,所述静态处理模块采用三通道神经网络;
5.根据权利要求1所述的一种无人机巡航图像处理系统,其特征在于,所述动态处理模块采用帧间差分法对所述图像数据进行动态处理,得到所述第二处理图像数据。
6.根据权利要求1所述的一种无人机巡航图像处理系统,其特征在于,所述融合分析模块包括:第一分析单元、第二分析单元和融合分析单元;
7.根据权利要求6所述的一种无人机巡航图像处理系统,其特征在于,所述融合分析模块采用双分支神经网络对所述第一处理图像数据和所述第二处理图像数据进行融合分析;
8.根据权利要求1所述的一种无人机巡航图像处理系统,其特征在于,所述图像采集模块还用于根据所述融合分析数据调整采集图像数据的频率。
9.根据权利要求1所述的一种无人机巡航图像处理系统,其特征在于,所述通信模块用于在所述融合分析数据超过预设阈值时将所述融合分析数据和对应的图像数据发送给远程监控中心。
10.一种无人机巡航图像处理方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种无人机巡航图像处理系统及方法,其中系统包括:图像采集模块、静态处理模块、动态处理模块、融合分析模块和通信模块;图像采集模块用于采集图像数据;静态处理模块用于对图像数据进行静态处理,得到第一处理图像数据;动态处理模块用于对图像数据进行动态处理,得到第二处理图像数据;融合分析模块用于对第一处理图像数据和第二处理图像数据进行融合分析,得到融合分析数据;通信模块用于将融合分析数据发送给远程监控中心。本申请通过对图像数据进行静态处理、动态处理和融合分析,提高了图像处理分析的准确性和全面性。
技术研发人员:赵永峰,马晓青,张虎,王辉
受保护的技术使用者:西安猎隼航空科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!