角振动台的角速度数据融合方法和角速度数据融合装置
本发明涉及信号处理,更具体地,涉及一种角振动台的角速度数据融合方法和角速度数据融合装置。
背景技术:
1、磁流体动力学(magnetohydrodynamics,mhd)角速度传感器,由于存在原理性局限,在角振动台的角速度较低时,mhd角速度传感器会受到反电动势和粘滞力的影响,其输出性能不佳,无法满足0.1hz到1khz范围内的微角振动的全频带测量需求。
2、相关技术常通过传统卡尔曼滤波算法,将低频性能优越的低频角速度传感器的测量数据和mhd角速度传感器的测量数据进行数据融合。
3、在实现本发明构思的过程中,发明人发现相关技术中至少存在如下问题:传统的卡尔曼滤波算法高度依赖高频角速度传感器和低频角速度传感器的传递函数模型,角速度数据融合精度较差,而且角速度数据融合过程中容易滤波发散。
技术实现思路
1、有鉴于此,本发明提供了一种角振动台的角速度数据融合方法和角速度数据融合装置。
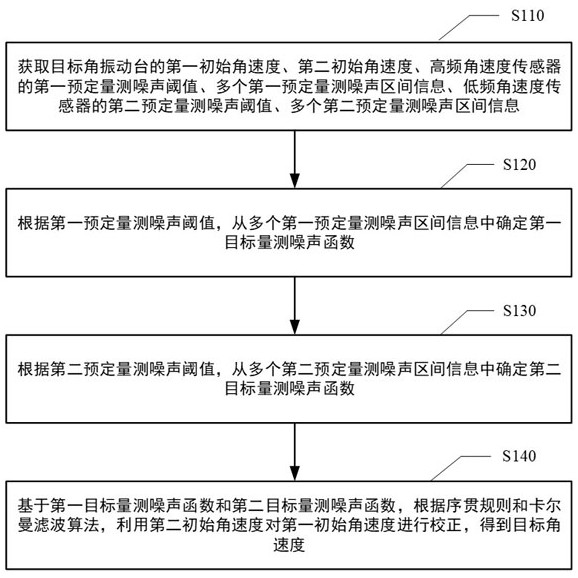
2、本发明的一个方面提供了一种角振动台的角速度数据融合方法。该角速度数据融合方法包括:获取目标角振动台的第一初始角速度、第二初始角速度、高频角速度传感器的第一预定量测噪声阈值、多个第一预定量测噪声区间信息、低频角速度传感器的第二预定量测噪声阈值、多个第二预定量测噪声区间信息。其中,上述第一初始角速度是利用上述高频角速度传感器测量得到的,上述第二初始角速度是利用上述低频角速度传感器测量得到的。根据上述第一预定量测噪声阈值,从上述多个第一预定量测噪声区间信息中确定第一目标量测噪声函数。根据上述第二预定量测噪声阈值,从上述多个第二预定量测噪声区间信息中确定第二目标量测噪声函数。以及基于上述第一目标量测噪声函数和上述第二目标量测噪声函数,根据序贯规则和卡尔曼滤波算法,利用上述第二初始角速度对上述第一初始角速度进行校正,得到目标角速度。
3、根据本发明的实施例,基于上述第一目标量测噪声函数和上述第二目标量测噪声函数,根据序贯规则和卡尔曼滤波算法,利用上述第二初始角速度对上述第一初始角速度进行校正,得到目标角速度包括:基于上述第一目标量测噪声函数和当前检测时刻的预定状态先验估计值,确定第一目标量测噪声值。基于上述第一目标量测噪声值、第一预定观测矩阵的转换值和预定状态误差协方差矩阵的预测值,确定第一卡尔曼增益矩阵。利用上述第一初始角速度,基于上述第一卡尔曼增益矩阵、上述第一预定观测矩阵的转换值和预定状态先验估计值,确定初始状态估计值。基于上述第一卡尔曼增益矩阵、单位矩阵和上述第一预定观测矩阵的转换值,对上述预定状态误差协方差矩阵的预测值进行更新,得到初始状态误差协方差矩阵。基于上述第二目标量测噪声函数和当前检测时刻的初始状态估计值,确定第二目标量测噪声值。基于上述第二目标量测噪声值、第二预定观测矩阵的转换值和上述初始状态误差协方差矩阵,确定第二卡尔曼增益矩阵。基于上述第二卡尔曼增益矩阵和上述第二预定观测矩阵的转换值,利用上述第二初始角速度对上述初始状态估计值进行校正,得到目标状态估计值。以及基于上述目标状态估计值和上述目标角振动台的输入真实角速度,得到目标角速度。
4、根据本发明的实施例,上述角速度数据融合方法还包括:基于上述第二卡尔曼增益矩阵、上述单位矩阵和上述第二预定观测矩阵的转换值,对上述初始状态误差协方差矩阵进行更新,得到目标状态误差协方差矩阵。
5、根据本发明的实施例,上述预定状态先验估计值是基于上一检测时刻状态值和一步状态转移矩阵确定的,其中上述一步状态转移矩阵是基于上述单位矩阵、采样时间间隔和状态方程的系数矩阵确定的。上述预定状态误差协方差矩阵的预测值是基于上一检测时刻状态误差协方差矩阵、上述一步状态转移矩阵和噪声协方差矩阵的初始值确定的。
6、根据本发明的实施例,上述角速度数据融合方法还包括:基于上述高频角速度传感器和上述低频角速度传感器测量上述目标角振动台的角速度,确定频响特性函数。基于上述频响特性函数建立状态空间模型,确定状态方程和量测方程。以及确定预定状态误差协方差矩阵、量测噪声协方差矩阵和系统状态变量的初始值。
7、根据本发明的实施例,上述第一预定量测噪声阈值包括第一预定上限阈值和第一预定下限阈值。上述根据上述第一预定量测噪声阈值,从上述多个第一预定量测噪声区间信息中确定第一目标量测噪声函数包括:基于第一量测分段指标与上述第一预定上限阈值和上述第一预定下限阈值进行比较,确定多个第一预定量测噪声区间信息。根据多个第一预定量测噪声区间信息确定上述第一目标量测噪声函数。
8、根据本发明的实施例,上述第一量测分段指标是基于上述第一初始角速度确定的。
9、根据本发明的实施例,上述第二预定量测噪声阈值包括第二预定上限阈值和第二预定下限阈值。上述根据上述第二预定量测噪声阈值,从上述多个第二预定量测噪声区间信息中确定第二目标量测噪声函数包括:基于第二量测分段指标与上述第二预定上限阈值和上述第二预定下限阈值进行比较,确定多个第二预定量测噪声区间信息。根据多个第二预定量测噪声区间信息确定上述第二目标量测噪声函数。
10、根据本发明的实施例,上述第二量测分段指标是基于上述第二初始角速度确定的。
11、本发明的另一个方面提供了一种角振动台的角速度数据融合装置。该角速度数据融合装置包括:目标角振动台。高频角速度传感器,上述高频角速度传感器与上述目标角振动台同轴安装,用于测量上述目标角振动台的第一初始角速度。低频角速度传感器,上述低频角速度传感器与上述高频角速度传感器和上述目标角振动台同轴安装,用于测量上述目标角振动台的第二初始角速度。以及校正装置,上述校正装置中存储有上述角速度数据融合方法,用于根据序贯规则和卡尔曼滤波算法,利用上述第二初始角速度对上述第一初始角速度进行校正,得到目标角速度。
12、根据本发明的实施例,本发明提供的角振动的角速度数据融合方法,通过设置量测噪声阈值实现量测噪声矩阵的分段自适应,根据序贯规则和卡尔曼滤波算法,利用低频性能较好的低频角速度传感器测量角振动得到的第二初始角速度,对高频角速度传感器测量得到的第一初始角速度进行校正,得到融合后的目标角速度,保证卡尔曼滤波算法收敛的同时,能够有效提高角速度数据融合的精度和带宽。而且,本发明通过设置量测噪声阈值,限制了量测噪声的迭代范围,保证了卡尔曼滤波算法的可靠性和鲁棒性,有效降低了角速度数据融合过程中滤波发散的可能性。
技术特征:
1.一种角振动台的角速度数据融合方法,其特征在于,所述方法包括:
2.根据权利要求1所述的角速度数据融合方法,其特征在于,基于所述第一目标量测噪声函数和所述第二目标量测噪声函数,根据序贯规则和卡尔曼滤波算法,利用所述第二初始角速度对所述第一初始角速度进行校正,得到目标角速度包括:
3.根据权利要求2所述的角速度数据融合方法,其特征在于,所述角速度数据融合方法还包括:
4.根据权利要求2所述的角速度数据融合方法,其特征在于,所述预定状态先验估计值是基于上一检测时刻状态值和一步状态转移矩阵确定的,其中,所述一步状态转移矩阵是基于所述单位矩阵、采样时间间隔和状态方程的系数矩阵确定的;
5.根据权利要求1所述的角速度数据融合方法,其特征在于,所述角速度数据融合方法还包括:
6.根据权利要求1所述的角速度数据融合方法,其特征在于,所述第一预定量测噪声阈值包括第一预定上限阈值和第一预定下限阈值;所述根据所述第一预定量测噪声阈值,从所述多个第一预定量测噪声区间信息中确定第一目标量测噪声函数包括:
7.根据权利要求6所述的角速度数据融合方法,其特征在于,所述第一量测分段指标是基于所述第一初始角速度确定的。
8.根据权利要求1所述的角速度数据融合方法,其特征在于,所述第二预定量测噪声阈值包括第二预定上限阈值和第二预定下限阈值;所述根据所述第二预定量测噪声阈值,从所述多个第二预定量测噪声区间信息中确定第二目标量测噪声函数包括:
9.根据权利要求8所述的角速度数据融合方法,其特征在于,所述第二量测分段指标是基于所述第二初始角速度确定的。
10.一种角振动台的角速度数据融合装置,其特征在于,所述装置包括:
技术总结
本发明提供了一种角振动台的角速度数据融合方法和角速度数据融合装置。该角速度数据融合方法包括:获取目标角振动台的第一初始角速度、第二初始角速度、高频角速度传感器的第一预定量测噪声阈值、多个第一预定量测噪声区间信息、低频角速度传感器的第二预定量测噪声阈值、多个第二预定量测噪声区间信息;根据第一预定量测噪声阈值,从多个第一预定量测噪声区间信息中确定第一目标量测噪声函数;根据第二预定量测噪声阈值,从多个第二预定量测噪声区间信息中确定第二目标量测噪声函数;以及基于第一目标量测噪声函数和第二目标量测噪声函数,根据序贯规则和卡尔曼滤波算法,利用第二初始角速度对第一初始角速度进行校正,得到目标角速度。
技术研发人员:李醒飞,柳冠豪,拓卫晓,王信用,王天宇
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!