生成巡逻路线的方法、装置及存储介质与流程
本发明涉及安全监管,特别是涉及一种生成巡逻路线的方法、装置及存储介质。
背景技术:
1、现有的巡逻路线确定方法主要通过人工预先确定一固定路线来对预定的巡逻区域如水域进行巡逻;由此确定的巡逻路线主观性较强、考虑的因素有限、且没有动态变化,使得不能达到预期的巡逻效果。
技术实现思路
1、本发明的实施例提供了一种生成巡逻路线的方法、装置及存储介质,以自动生成巡逻路线。
2、为了实现上述目的,一方面,提供一种生成巡逻路线的方法,包括:
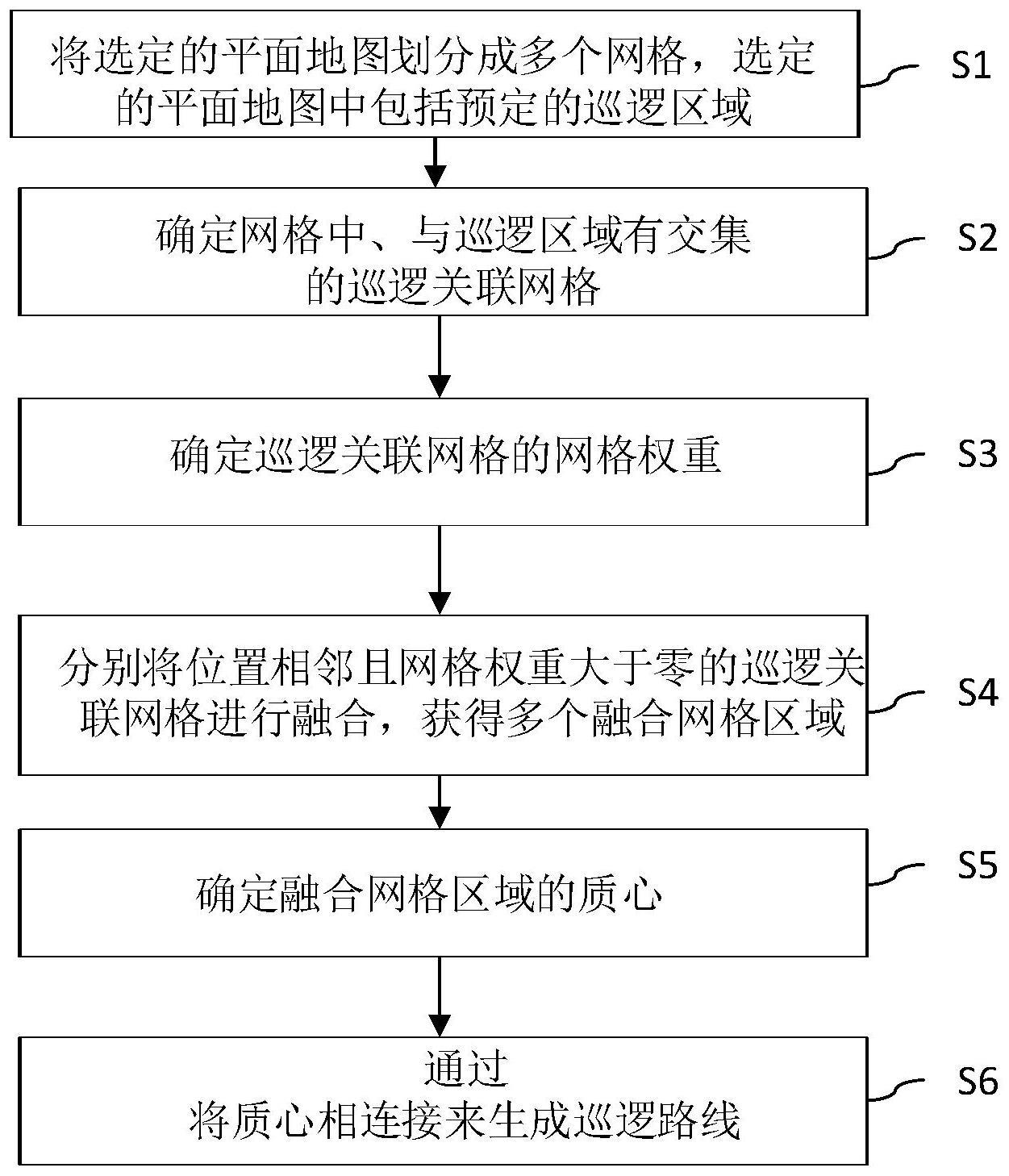
3、s1,将选定的平面地图划分成多个网格,选定的平面地图中包括预定的巡逻区域;
4、s2,确定网格中、与巡逻区域有交集的巡逻关联网格;
5、s3,对于包含关键点的巡逻关联网格,根据巡逻关联网格所包含的关键点的权重来确定巡逻关联网格的网格权重,其中,关键点为满足预定条件的点或为预先选定的点,关键点的权重预先设定;
6、s4,分别将位置相邻且网格权重大于零的巡逻关联网格进行融合,获得多个融合网格区域;
7、s5,确定各融合网格区域的质心;
8、s6,通过将质心相连接来获得巡逻路线。
9、优选地,所述的方法,其中,预定的巡逻区域为水域,步骤s1包括:
10、在选定的平面地图上标注出水域范围;
11、确定能将水域范围包含在内的最小的矩形;
12、按照预定的距离将矩形划分为网格。
13、优选地,所述的方法,其中,步骤s1中,水域范围的边界通过选定的多个点形成的多边形来表示。
14、优选地,所述的方法,其中,步骤s1中,
15、确定能将水域范围包含在内的最小的矩形为:确定能将水域范围包含在内的最小的正方形;
16、按照预定的距离将矩形划分为网格为:按照预定的距离将正方形等分为网格。
17、优选地,所述的方法,其中,步骤s2包括:
18、确定网格的中心点;
19、使用光线投射法判断中心点是否在巡逻区域的内部;
20、将中心点在巡逻区域的内部的网格确定为与巡逻区域有交集的巡逻关联网格。
21、优选地,所述的方法,其中,步骤s3中,根据巡逻关联网格所包含的关键点的权重来确定巡逻关联网格的网格权重包括:
22、将所包含的关键点的权重求和来确定巡逻关联网格的网格权重。
23、优选地,所述的方法,其中,巡逻区域包括水域范围,步骤s3中,将巡逻区域内、满足如下一个或多个条件的位置点选定为关键点:
24、发生过警情的位置点;
25、违法船舶停留时间超过预定时间阈值的位置点;
26、违法船舶发生案件的位置点。
27、优选地,所述的方法,其中,通过如下步骤来获得违法船舶停留时间超过预定时间阈值的位置点:
28、查询船舶的ais轨迹;
29、将每个ais轨迹按照位置点进行聚合,获得船舶在位置点的停留时间;
30、判断停留时间是否超过预定时间阈值。
31、优选地,所述的方法,其中,在获得多个融合网格区域之后、确定融合区域的质心之前还包括:
32、将融合网格区域中所包含的多个逻辑关联网格的权重求和,得到各融合网格区域的权重,并按照融合网格区域权重的大小对融合网格区域进行排序;
33、确定巡逻区域在网格横纵方向所包含的网格数目的最大值,并判断融合网格区域的数量是否大于最大值;如是,则选择所有的融合网格区域进行步骤s5的质心确定;如否,则选择融合网格区域权重大的、数目等于最大值的多个融合网格区域进行步骤s5的质心确定。
34、优选地,所述的方法,其中,步骤s5包括:
35、针对一融合网格区域,从该融合网格区域包含的巡逻关联网格中选择一巡逻关联网格,并从该巡逻关联网格中选择一关键点作为初始质心,对该融合网格区域包含的所有关键点使用kmeans算法,确定出该融合网格区域的最终质心。
36、优选地,所述的方法,其中,
37、步骤s5包括:
38、确定质心所属的巡逻关联网格;
39、步骤s6包括:
40、从任一选定的质心开始,选择与该质心距离最近巡逻关联网格的质心作为下一个质心,直到所有的质心都被使用,以此方式确定质心的排列顺序;
41、按照排列顺序,将质心相连接,连线为巡逻路线。
42、另一方面,提供了一种生成巡逻路线的装置,包括存储器和处理器,存储器存储有至少一段程序,至少一段程序由处理器执行以实现如上文任一所述的方法。
43、又一方面,提供了一种计算机可读存储介质,其中,存储介质中存储有至少一段程序,至少一段程序由处理器执行以实现如上文任一所述的方法。
44、上述技术方案具有如下技术效果:
45、利用本发明实施例的生成巡逻路线的技术方案,可以实现巡逻路线的自动生成,从而克服了现有技术由人工确定的主观性;
46、且在进一步的实施例中,可以实现巡逻路线根据情况的变化而动态变化,具体地,当与巡逻相关的因素如警情、案件、违法船舶ais信息发生变化时,由于在巡逻路线的生成过程中考虑了这些因素,则可以根据这些变化的情况来动态地生成巡逻路线;
47、在本发明进一步的实施例中,可以根据警情、案件、违法船舶ais信息来自动生成水域如河流、湖泊的巡逻路线,使得巡逻更有针对性,可以获得更好的巡逻效果。
技术特征:
1.一种生成巡逻路线的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述预定的巡逻区域为水域,所述步骤s1包括:
3.根据权利要求2所述的方法,其特征在于,所述步骤s1中,
4.根据权利要求1所述的方法,其特征在于,
5.根据权利要求1所述的方法,其特征在于,所述巡逻区域包括水域范围,所述步骤s3中,将巡逻区域内、满足如下一个或多个条件的位置点选定为关键点:
6.根据权利要求1所述的方法,其特征在于,在获得多个融合网格区域之后、确定融合区域的质心之前还包括:
7.根据权利要求1所述的方法,其特征在于,所述步骤s5包括:
8.根据权利要求1所述的方法,其特征在于,
9.一种生成巡逻路线的装置,其特征在于,包括存储器和处理器,所述存储器存储有至少一段程序,所述至少一段程序由处理器执行以实现如权利要求1至8任一所述的方法。
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一段程序,所述至少一段程序由处理器执行以实现如权利要求1至8任一所述的方法。
技术总结
本发明提供了一种生成巡逻路线的方法、装置及存储介质,该方法包括:S1,将选定的平面地图划分成多个网格,所述选定的平面地图中包括预定的巡逻区域;S2,确定所述网格中、与所述巡逻区域有交集的巡逻关联网格;S3,对于包含关键点的巡逻关联网格,根据巡逻关联网格所包含的关键点的权重来确定巡逻关联网格的网格权重,其中,所述关键点为满足预定条件的点或为预先选定的点,所述关键点的权重预先设定;S4,分别将位置相邻且网格权重大于零的巡逻关联网格进行融合,获得多个融合网格区域;S5,确定各融合网格区域的质心;S6,通过将质心相连接来生成巡逻路线。利用上述技术方案,可以自动生成巡逻路线。
技术研发人员:江文涛,陈生坚,庄惠婷,卢天发,张翔
受保护的技术使用者:罗普特科技集团股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!