一种无人艇、无人机协同控制的海洋牧场安全巡检系统
本申请属于海洋牧场安全巡检和生产监控,更具体地说,是涉及一种无人艇、无人机协同控制的海洋牧场安全巡检系统。
背景技术:
1、海洋牧场是指基于海洋生态系统原理,在特定海域通过人工鱼礁、增殖放流等措施,构建或修复海洋生物繁殖、生长、索饵或避敌所需的场所。是一种增殖养护渔业资源,改善海域生态环境,实现渔业资源可持续利用的渔业模式。因此海洋牧场是保护和增殖渔业资源,修复水域生态环境的重要手段。
2、不管对哪种类型的海洋牧场,大范围海域的水面观测、养护管理以及安全监控都是重要的任务之一,其中旅游观光和休闲渔业类的经营项目更加需要快速的水面安保和救援服务。因此海洋牧场上需要大量的水面船只进行各类水面观测、渔业及设备养护、水质监测、安全监察等工作。目前这些工作主要依赖岸基的视频监控中心和人工巡逻值守船只来完成。
3、由于海岸线崎岖复杂,监控死角多,基于岸基的固定安监系统存在应用上的困难。在离岸开阔区域,由于距离海岸较远,在雨、雾天气下,岸基的安监系统也难以发挥作用。因此,大部分的海洋牧场常年需要布置人员进行24小时海上巡逻和监控。由于海洋牧场上工作环境恶劣,人员安全性保障困难,工作强度大,企业需要支付大量的人员费用。同时,由于安全监控人员远离陆地,管理和把控的难度大,在牧场的收获季节,极易形成监守自盗和内外勾结的事件,对企业的经济效益造成较大的损失。
技术实现思路
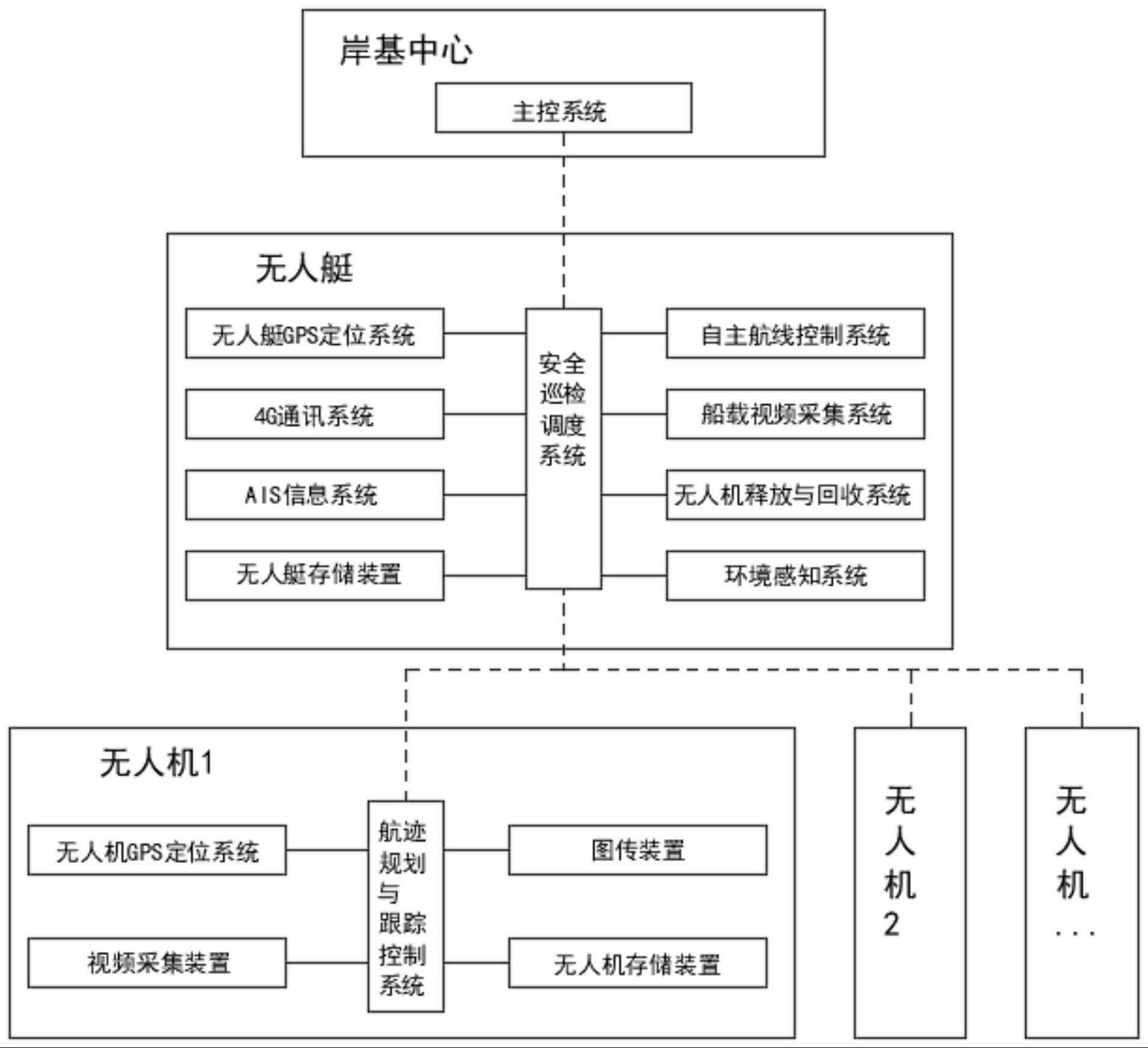
1、为实现上述目的,本申请采用的技术方案是:提供一种无人艇、无人机协同控制的海洋牧场安全巡检系统,包括岸基中心、无人艇和无人机,所述无人艇上装配有多架无人机,所述岸基中心传输巡检任务至无人艇;所述无人艇根据巡检任务自动规划无人艇巡检路线、无人机巡检路径以及无人机起飞、收回的时刻和地点;多架无人机按照无人机巡检路径交替巡检,每架无人机在对应的起飞时刻和地点起飞,自动检测并跟踪目标,并将无人机巡检路径上采集的信息回传至无人艇,所述无人机在对应的收回时刻和地点收回;所述无人艇沿着预定的无人艇巡检路线航行,直到整个海洋牧场巡检完成后,所述无人艇和多架无人机共同返回码头停泊点;所述无人艇将无人艇采集的信息和无人机采集的信息发送给岸基中心,完成巡检任务。
2、可选地,所述无人艇包括安全巡检调度系统,所述安全巡检调度系统连接有无人艇gps定位系统、4g通讯系统、ais信息系统、自主航线控制系统、船载视频采集系统、无人机释放与回收系统、无人艇存储装置和环境感知系统。
3、可选地,所述安全巡检调度系统,用于接收岸基中心主控系统的巡检指令,并根据巡检指令规划无人艇的巡检总任务、规划无人机的巡检子任务;安全巡检调度系统将巡检总任务、巡检子任务传送至自主航线控制系统;
4、所述自主航线控制系统,预存海洋牧场地图,并根据巡检总任务自动的规划无人艇巡检路线,根据巡检子任务规划无人机起飞、收回的时刻和地点,规划无人机巡检路径;并将无人机起飞、收回的时刻和地点以及无人机巡检路径发送至安全巡检调度系统。
5、可选地,所述环境感知系统,用于测量风速、温度和水流速度等环境信息,并感知无人艇航向上是否有障碍物;
6、所述无人艇gps定位系统,用于实时获取无人艇的位置信息;
7、所述4g通讯系统,用于当无人艇靠近岸基中心时,无人艇与岸基中心的通讯;
8、所述ais信息系统,用于当无人艇远离岸基中心且无4g通讯信号时,通过ais系统将无人艇实时运行状态发送给岸基中心;
9、所述船载视频采集系统,用于对无人艇附近的海面进行视频采集和监控;
10、所述无人机释放与回收系统,用于将巡检飞回的无人机固定在底座上,同时自动松脱即将放飞的无人机;
11、所述无人艇存储装置,用于存储无人听上船载视频采集系统采集的监控视频和无人机上视频采集装置采集的监控视频。
12、可选地,所述无人机包括航迹规划与跟踪控制系统,航迹规划与跟踪控制系统连接有无人机gps定位系统、视频采集装置、图传装置和无人机存储装置。
13、可选地,所述轨迹规划与跟踪控制系统,用于接收无人艇规划好的巡检子任务和无人机巡检路径,完成无人机巡检路径巡检和路径跟踪控制;
14、视频采集装置,用于采集无人机巡检范围内的视频信息,并对视频中的目标进行自动检测和跟踪,自动识别安全隐患并发出报警信号和视频信息。
15、可选地,所述无人机gps定位系统,用于实时获取无人机的gps信息;
16、所述图传装置,用于将视频采集装置采集到的视频数据实时的传送至无人艇上;
17、所述无人机存储装置,用于存储无人机的视频数据和控制参数数据。
18、可选地,所述无人机为四旋翼无人机。
19、本申请还提供一种无人艇、无人机协同控制的海洋牧场安全巡检方法,包括以下步骤:
20、步骤一,创建海洋地图并存储至无人艇;
21、步骤二,岸基中心的主控系统向无人艇发送巡检指令;
22、步骤三,无人艇根据巡检指令,规划无人艇巡检路线、无人机发出和收回策略、无人机巡检路径;
23、步骤四,无人艇出发,开始巡检,并根据海况具体参数调整无人艇巡检路线、无人机发出和收回策略、无人机巡检路径;
24、巡检过程中,无人艇通过ais信息系统将无人艇和无人机实时运行状态发送给岸基中心;
25、步骤五,无人艇抵达无人机发出地点后,放飞无人机并将无人机规划路线发送至无人机的航迹规划与跟踪控制系统;
26、步骤六,无人艇按照预定的无人艇巡检路线航行,同时无人机执行巡检任务;
27、步骤七,无人艇抵达预设的无人机收回地点后,等待无人机巡检结束降落到无人艇上;
28、步骤八,结束巡检任务的无人机充电,同时无人艇继续沿着预定的无人艇巡检路线继续航行至下一个无人机放飞地点,执行下一无人机放飞-巡检-回收过程,直到整个海洋牧场巡检完成后无人艇和多架无人机共同返回码头停泊点;
29、步骤九,无人艇回到码头停泊点后,通过4g信号将整个巡检过程中,无人艇上的监控视频和无人机上的监控视频发送给岸基中心,巡检任务结束。
30、可选地,步骤一中,对海洋牧场巡检生产区域、可通行区域、无人艇停靠码头进行高精度地图创建,并以二维栅格形式存储于无人艇中。
31、本申请通过无人机采识别跟踪水面目标,实现牧场环境监察,同时无人艇智能规划行驶路线,协同配合无人机的监测和巡检工作;本申请能够智能、高效、低成本的完成海洋牧场水面观测、安全监控、快速救援、全天候无人化值守等任务,实现无人化的智能监控和安全巡检;本申请可以实现大范围的海洋牧场自动化智能安全巡检和安保监控,也可以用于海洋牧场的生产安全管理和海面检测,同时具备安全救援等功能,可以大幅度的提高海洋牧场的生产和管理的智能化水平。
技术特征:
1.一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:包括岸基中心、无人艇和无人机,所述无人艇上装配有多架无人机,所述岸基中心传输巡检任务至无人艇;所述无人艇根据巡检任务自动规划无人艇巡检路线、无人机巡检路径以及无人机起飞、收回的时刻和地点;多架无人机按照无人机巡检路径交替巡检,每架无人机在对应的起飞时刻和地点起飞,自动检测并跟踪目标,并将无人机巡检路径上采集的信息回传至无人艇,所述无人机在对应的收回时刻和地点收回;所述无人艇沿着预定的无人艇巡检路线航行,直到整个海洋牧场巡检完成后,所述无人艇和多架无人机共同返回码头停泊点;所述无人艇将无人艇采集的信息和无人机采集的信息发送给岸基中心,完成巡检任务。
2.如权利要求1所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述无人艇包括安全巡检调度系统,所述安全巡检调度系统连接有无人艇gps定位系统、4g通讯系统、ais信息系统、自主航线控制系统、船载视频采集系统、无人机释放与回收系统、无人艇存储装置和环境感知系统。
3.如权利要求2所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述安全巡检调度系统,用于接收岸基中心主控系统的巡检指令,并根据巡检指令规划无人艇的巡检总任务、规划无人机的巡检子任务;安全巡检调度系统将巡检总任务、巡检子任务传送至自主航线控制系统;
4.如权利要求3所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述环境感知系统,用于测量风速、温度和水流速度等环境信息,并感知无人艇航向上是否有障碍物;
5.如权利要求3所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述无人机包括航迹规划与跟踪控制系统,航迹规划与跟踪控制系统连接有无人机gps定位系统、视频采集装置、图传装置和无人机存储装置。
6.如权利要求5所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述轨迹规划与跟踪控制系统,用于接收无人艇规划好的巡检子任务和无人机巡检路径,完成无人机巡检路径巡检和路径跟踪控制;
7.如权利要求6所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述无人机gps定位系统,用于实时获取无人机的gps信息;
8.如权利要求1所述的一种无人艇、无人机协同控制的海洋牧场安全巡检系统,其特征在于:所述无人机为四旋翼无人机。
9.一种无人艇、无人机协同控制的海洋牧场安全巡检方法,其特征在于:包括以下步骤:
10.如权利要求9所述的一种无人艇、无人机协同控制的海洋牧场安全巡检方法,其特征在于:步骤一中,对海洋牧场巡检生产区域、可通行区域、无人艇停靠码头进行高精度地图创建,并以二维栅格形式存储于无人艇中。
技术总结
本申请涉及海洋牧场安全巡检和生产监控技术领域,尤其涉及一种无人艇、无人机协同控制的海洋牧场安全巡检系统,包括岸基中心、无人艇和无人机,无人艇上装配有多架无人机。本申请还提供一种无人艇、无人机协同控制的海洋牧场安全巡检方法。本申请提供的通过无人机采识别跟踪水面目标,实现牧场环境监察,同时无人艇智能规划行驶路线,协同配合无人机的监测和巡检工作;实现大范围的海洋牧场自动化智能安全巡检和安保监控,也可以用于海洋牧场的生产安全管理和海面检测,同时具备安全救援等功能,可以大幅度的提高海洋牧场的生产和管理的智能化水平。
技术研发人员:刘清河,庄皓麟,陈书虎,徐铭泽,李可
受保护的技术使用者:哈尔滨工业大学(威海)
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!