一种用于高速收费站自动收发车辆通行卡的机器人的制作方法
本发明涉及高速收费机器人,尤其涉及一种用于高速收费站自动收发车辆通行卡的机器人。
背景技术:
1、车辆在驶上高速时,需要在收费处领取通行卡,待下高速时的收费处再将通行卡收回,从而计算高速费。
2、目前在上高速时,大多通过人工向驾驶员递交通行卡,效率较低。也有一些收费处采用机器人管理通行卡存储箱,驾驶员需要输入个人信息,比如刷证件,才能领取通行卡。
3、无论是人工方案还是机器人方案,都无法高效、准确地将通行卡直接递交给驾驶员或者从驾驶员手中收回,有鉴于此,特提出本发明。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种用于高速收费站自动收发车辆通行卡的机器人,从而利用较少的摄像头和简便快捷的车窗位置识别方案,快速准确地将通知卡递交到车窗处,方便驾驶员领取和收回。
2、本发明提供的一种用于高速收费站自动收发车辆通行卡的机器人,其特征在于,包括:
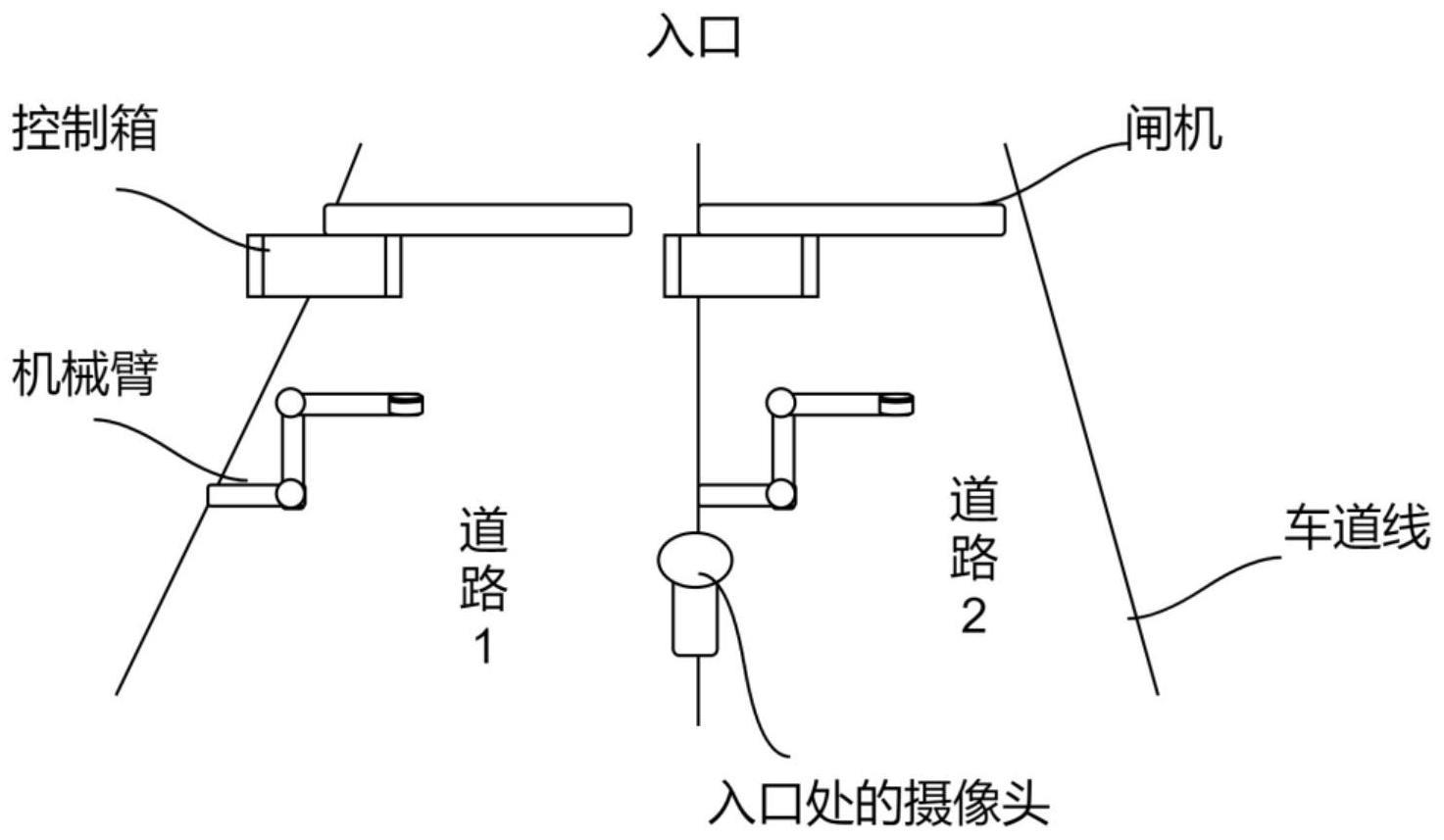
3、位于收费处入口的摄像头,用于采集车辆的车牌号和车辆停止位置,将所述车牌号和停止位置发送给控制箱;
4、控制箱,基于预先存储的车牌号与车型和前车窗布置位置的对应关系,确定所述车型和前车窗布置位置;根据所述车型、前车窗布置位置和车辆停止位置确定所述前车窗的空间位置;将所述前车窗的空间位置发送给机械臂;
5、机械臂,用于以所述前车窗的空间位置为目的地进行运动,并在机械臂末端弹出通行卡;当所述通行卡被取走时,机械臂收回到设定位置;
6、闸机,用于在机械臂收回到设定位置后,开启闸机以便车辆通过。
7、可选的,所述摄像头位于至少两条道路的中间,用于采集至少两条道路上车辆的车牌号和车辆停止位置。
8、可选的,在所述机械臂未运动到所述目的地而停止,或者运动到目的地设定时长后通行卡未被取走,通知所述控制箱发生故障;
9、所述控制箱控制所述摄像头采集所述故障的机械臂所在的位置处的图像;根据所述图像分析故障原因;根据所述故障原因执行解决方案。
10、可选的,所述故障原因包括:车窗未开启;
11、根据所述故障原因执行解决方案,包括:所述控制箱控制所述故障的机械臂运动到车门外侧,并语音通知驾驶员开门领取通行卡。
12、可选的,所述故障原因包括:车窗开启但所述通行卡未被取走;
13、根据所述故障原因执行解决方案,包括:语音通知驾驶员尽快领取通行卡。
14、可选的,所述故障原因包括:故障的机械臂未运动到所述目的地而停止;
15、根据所述故障原因执行解决方案,包括:如果故障的机械臂达到目的地后运动到当前位置,语音通知驾驶员开门领取通行卡;
16、如果故障的机械臂本次未运动到所述目的地,再次控制所述机械臂从当前位置运动所述目的地。
17、可选的,所述控制箱的位置与所述闸机的位置小于设定值,或者所述控制箱在所述闸机的一端;
18、所述控制箱上安装有摄像头;
19、所述控制箱在机械臂收回到设定位置后,通过所述控制箱上的摄像头采集车辆的车牌号,如果与收费处入口的摄像头采集到的车牌号一致,通知所述闸机开启。
20、可选的,如果与收费处入口的摄像头采集到的车牌号不一致,所述控制箱基于控制箱上的摄像头采集车辆的车牌号与车型和前车窗布置的对应关系,确定所述车型和前车窗布置位置;根据所述车型、前车窗布置和车辆停止位置确定所述前车窗的空间位置;将所述前车窗的空间位置发送给所述机械臂;
21、机械臂,用于以所述前车窗的空间位置为目的地进行运动,并在机械臂末端弹出通行卡;当所述通行卡被取走时,机械臂收回到设定位置;
22、闸机,用于在机械臂收回到设定位置后,开启闸机以便车辆通过。
23、可选的,位于收费处入口的多传感器,用于在车辆停止后采集前车窗的空间位置。
24、本发明还提供一种用于高速收费站自动收发车辆通行卡的机器人,包括:
25、位于收费处出口的摄像头,用于采集车辆的车牌号和车辆停止位置,将所述车牌号和停止位置发送给控制箱;
26、控制箱,基于预先存储的车牌号与车型和前车窗布置位置的对应关系,确定所述车型和前车窗布置位置;根据所述车型和前车窗布置位置确定所述前车窗的空间位置;将所述前车窗的空间位置发送给所述机械臂;
27、机械臂,用于以所述前车窗的空间位置为目的地进行运动,所述机械臂末端有通行卡的读卡器;当通行卡放置到所述读卡器上时,所述读卡器将读取到的信息发送到控制箱,以进行高速计费;所述机械臂收回到设定位置;
28、闸机,用于在机械臂收回到设定位置后,开启闸机以便车辆通过。
29、本发明提出的方法有以下技术效果:
30、1、通过预先存储的车牌号与车型、前车窗布置的对应关系和停止位置,确定前车窗的空间位置,不需要复杂的图像识别算法,这种对应关系和空间位置的换算精度较高,计算速度快,能够准确、快速地确定前车窗的位置。
31、2、机械臂可以自行弹出通行卡并检测通行卡的取走状态,进而触发回到设定位置,具备较高的智能性。
32、3、在机械臂回到设定位置后再开启闸机,可以避免机械臂被车辆剐蹭。
33、4、本发明中的摄像头位置至少两条道路的中间,实现了一个摄像头同时采集多条道路上车辆的车牌号和停止位置,节省了成本。
34、5、在机械臂发生故障后,设计了一系列的解决方案。
35、6、通过比较收费处入口的摄像头与控制箱上摄像头采集的车牌号是否一致,并控制机械臂和闸机执行相应操作,避免车辆加塞。
36、7、基于多传感器融合算法采集前车窗的空间位置,可以提高前车窗位置采集的准确性,这作为前述对应关系的补充方案。
技术特征:
1.一种用于高速收费站自动收发车辆通行卡的机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,所述摄像头位于至少两条道路的中间,用于采集至少两条道路上车辆的车牌号和车辆停止位置。
3.根据权利要求1所述的机器人,其特征在于,在所述机械臂未运动到所述目的地而停止,或者运动到目的地设定时长后通行卡未被取走,通知所述控制箱发生故障;
4.根据权利要求3所述的机器人,其特征在于,所述故障原因包括:车窗未开启;
5.根据权利要求3所述的机器人,其特征在于,所述故障原因包括:车窗开启但所述通行卡未被取走;
6.根据权利要求3所述的机器人,其特征在于,所述故障原因包括:故障的机械臂未运动到所述目的地而停止;
7.根据权利要求1所述的机器人,其特征在于,所述控制箱的位置与所述闸机的位置小于设定值,或者所述控制箱在所述闸机的一端;
8.根据权利要求7所述的机器人,其特征在于,
9.根据权利要求1所述的机器人,其特征在于,位于收费处入口的多传感器,用于在车辆停止后基于多传感器融合算法采集前车窗的空间位置。
10.一种用于高速收费站自动收发车辆通行卡的机器人,其特征在于,包括:
技术总结
本发明涉及一种用于高速收费站自动收发车辆通行卡的机器人,涉及高速收费机器人技术领域,该机器人包括位于收费处入口的摄像头,用于采集车辆的车牌号和车辆停止位置,将所述车牌号和停止位置发送给控制箱;控制箱,基于预先存储的车牌号与车型和前车窗布置位置的对应关系,确定所述车型和前车窗布置位置;将前车窗的空间位置发送给机械臂;机械臂以所述前车窗的空间位置为目的地进行运动,并在机械臂末端弹出通行卡;机械臂收回到设定位置;在机械臂收回到设定位置后,开启闸机以便车辆通过。本发明利用较少的摄像头和简便快捷的车窗位置识别方案,快速准确地将通知卡递交到车窗处,方便驾驶员领取和收回。
技术研发人员:王晓辉,单洪伟
受保护的技术使用者:无锡八英里电子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!