通航低空监视系统及方法与流程
1.本发明涉及民用航空领域,尤其涉及一种通航低空监视系统及方法。
背景技术:
2.通用航空(简称通航)业是涵盖短途运输、商务、私人和娱乐飞行、生产作业、应急救援等多种类飞行活动,以及航空器研发制造、市场运营、综合保障服务等诸多领域的全产业链体系,已经被定位为国家战略性新兴产业。低空飞行活动的快速增加,迫切需要增强低空空域监视能力。
3.长期以来,“飞不起来、飞不顺畅”困扰着我国通用航空业,其重要原因在于低空空域的运行管理和低空飞行服务保障体系缺乏有效的技术手段或系统装备实现低空通航飞行活动的有效监视。究其原因,主要有以下方面:第一,通用航空飞行与运输航空飞行差异极大。运输航空飞行活动在固定的航路航线,地面有完善的空管监视网络,运输飞机有先进的且满足国际统一规范要求的机载通信导航监视设备。随着我国运输飞机ads
‑
b机载设备的强制加装,空管系统地面ads
‑
b监视网络、监视雷达的协同,已经实现了运输航空飞行全流程的地空监视。飞行员与管制员的协同联动,以及运输飞机机载空中防撞设备(tcas)的使用,又确保了空域中运输飞机之间的安全间隔。
4.而通航飞行活动种类繁多,任务复杂,作业区域广泛。通航飞行,既有沿着航路航线或穿越航路航线的通航飞行活动,也有在城市上空、荒漠区、无人区、陆地与海洋交界区等环境的通航低空飞行活动。执行通航作业任务时,飞行高度一般在3000米以下。现有的监视系统及监视网络,无法实现对通航飞行活动的有效监视。
5.第二,对航空器飞行活动的有效监视,是一个涉及到卫星导航、机载设备和地面设备的空天地一体化运行的问题。通用航空器种类复杂,既有沿航路航线执行商务飞行的昂贵的公务机,其机载设备性能先进,与运输飞行相比也功能性能相当,甚至更有优势;也有执行农林作业、航空喷洒、空中巡查、人工降雨、电力巡线等作业任务无固定航路航线的通航飞机,包含直升机、固定翼,航空器种类繁多、机载设备配置和性能差异大。从工程应用可实现度、经济性等方面,无法将用于运输航空的现有的机载设备和地面系统在通用航空进行扩展应用,进而满足通航低空飞行活动的监视需求。
6.第三,从运行职责角度,通用航空在航路航线以外空域的飞行活动,也即是绝大多数的通航飞行活动,空中飞行安全和间隔保持由通航飞行员负责。通航飞行员通过目视观察舱外,建立空中交通情景意识,操控飞机确保安全间隔,并对潜在的空中威胁进行主动避让,地面没有空管管制人员协助。随着我国低空空域管理改革工作的拓展,低空空域通航飞行活动将逐渐密集,通航飞行活动的综合监视需求,还需要考虑空空监视,协助通航飞行员保持安全飞行间隔。
7.目前低空空域监视可用的技术有:(1)卫星定位+广播式自动相关监视(ads
‑
b):采用1090兆赫扩展电文(1090es)为
唯一数据链,作为低空空域监视应用主要技术手段,推动广播式自动相关监视的建设与运行,鼓励通用航空器采用“北斗+gps”作为定位数据源。
8.(2)卫星定位+北斗短报文(gnss+rdss):实现“北斗+gps”的航空器定位,采用北斗短报文进行定位信息传输,构建以北斗短报文数据为基础的北斗低空监视信息系统,实现对低空空域北斗定位与监视数据汇集、融合、整理与服务。
9.(3)卫星定位+移动通信网网络:实现“北斗+gps”的航空器定位,在有条件的区域采用移动通信网络(4g/5g)实现定位信息传输。
10.(4)低空监视雷达、光学探测等新监视技术。
11.上述前三种技术方式,已有部分应用案例,但并不能完全满足低空空域监视需求,第四种新监视技术目前还不成熟。四种技术方式的技术对比分析详见表1。
12.低空空域主要用于承载各类通用航空器(包括通用飞机、轻型直升机、无人机、滑翔机、无动力三角翼飞行器等)的飞行活动,相比于运输类空域,这一空域内的飞行活动具有数量庞大、航线多样、受地形和气象条件影响较多、空中碰撞概率大等问题。目前,由于国内配套的通信、导航、监视和管制手段的落后或缺乏,以及低空飞行管理和服务能力还存在不少薄弱环节,“看不见、连不上、管不住”的问题比较突出。
13.表1 低空监视技术对比分析表
技术实现要素:
14.有鉴于此,本发明提供一种通航低空监视系统及方法,以提高通航低空监视效果。
15.一方面,本发明提供一种通航低空监视系统,包括:用于通航航空器机载端的多模式通航cns设备、地面端的通航地面监视系统以及通航地面服务器;所述多模式通航cns设备,用于获取通用航空器的位置信息以及气压高度信息,并根据所述通用航空器的位置信息以及气压高度信息分别生成卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;所述通航地面监视系统包括:卫星导航地面终端、ads
‑
b地面站以及移动通信基站;所述卫星导航地面终端用于接收、解析并转发所述卫星导航监视信号,所述ads
‑
b地面站用于接收、解析并转发ads
‑
b监视信号,所述移动通信基站用于接收、解析并转发移动通信监视信息;所述通航地面服务器用于接收并根据所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息,生成通航航空器综合航迹信息。
16.进一步地,所述通航地面监视系统包括地面中心站以及多个ads
‑
b地面站,所述地面中心站包括所述卫星导航地面终端、ads
‑
b地面站以及移动通信基站;所述多个ads
‑
b地面站用于将多路ads
‑
b监视信号发送至所述通航地面服务器;所述地面中心站用于将所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息发送至所述通航地面服务器。
17.进一步地,所述通航地面服务器包括:第一判断模块,用于判断在定时器列表中是否存在与所述通航地面服务器接收的监视数据中航空器识别码相同的数据,所述监视数据包括:所述多个ads
‑
b地面站发送的多路ads
‑
b监视信号、所述地面中心站发送的所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;第二判断模块,与所述第一判断模块连接,所述第二判断模块用于若存在与所述监视数据中航空器识别码相同的数据,则判断所述监视数据与具有相同航空器识别码的数据的经度以及维度是否相同;第一处理模块,与所述第二判断模块连接,所述第一处理模块用于在所述监视数据与具有相同航空器识别码的数据的经度以及维度相同时,则丢弃所述监视数据;第三判断模块,与所述第一处理模块连接,所述第三判断模块用于在所述监视数据与具有相同航空器识别码的数据的经度以及维度不同时,判断所述监视数据的toa时间是否小于所述具有相同航空器识别码的数据的toa时间;第二处理模块,与所述第三判断模块连接,所述第二处理模块用于若所述监视数据的toa时间小于所述具有相同航空器识别码的数据的toa时间,则丢弃所述监视数据;第三处理模块,与所述第二处理模块连接,所述第三处理模块用于若所述监视数据的toa时间不小于所述具有相同航空器识别码的数据的toa时间,则删除所述相同的数据,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器,所述定时器用于在达到预定的时长时自动删除所述定时器列表的数据;航迹生成及显示模块,与所述第三处理模块连接,所述航迹生成及显示模块用于根据所述定时器列表的数据生成通航航空器综合航迹信息,并在监视界面显示所述通航航空器综合航迹信息。
18.进一步地,所述的通航低空监视系统还包括:第四处理模块,与所述第三处理模块连接,所述第四处理模块用于当不存在与所述监视数据具有相同航空器识别码的数据时,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器。
19.进一步地,所述卫星导航地面终端为北斗地面终端。
20.进一步地,所述多模式通航cns设备,用于基于ads
‑
b in的空空监视功能,为通用航空器提供空中交通态势感知信息与安全预警信息。
21.另一方面,本发明提供一种通航低空监视方法,应用于上述的通航低空监视系统,所述通航低空监视方法包括:获取通用航空器的位置信息以及气压高度信息,并根据所述通用航空器的位置信息以及气压高度信息分别生成卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;
同时发送所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;接收并根据所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息,生成通航航空器综合航迹信息。
22.进一步地,所述同时发送所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息的步骤:多个ads
‑
b地面站同时将多路ads
‑
b监视信号发送至通航地面服务器;地面中心站同时将所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息发送至所述通航地面服务器。
23.进一步地,所述根据所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息,生成通航航空器综合航迹信息的步骤包括:判断在定时器列表中是否存在与所述通航地面服务器接收的监视数据中航空器识别码相同的数据,所述监视数据包括:所述多个ads
‑
b地面站发送的多路ads
‑
b监视信号、所述地面中心站发送的所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;若存在与所述监视数据具有相同航空器识别码的数据,则判断所述监视数据与具有相同航空器识别码的数据的经度以及维度是否相同;在所述监视数据与具有相同航空器识别码的数据的经度以及维度相同时,则丢弃所述监视数据;在所述监视数据与具有相同航空器识别码的数据的经度以及维度不同时,判断所述监视数据的toa时间是否小于所述具有相同航空器识别码的数据的toa时间;若所述监视数据的toa时间小于所述具有相同航空器识别码的数据的toa时间,则丢弃所述监视数据;若所述监视数据的toa时间不小于所述具有相同航空器识别码的数据的toa时间,则删除所述相同的数据,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器,所述定时器用于在达到预定的时长时自动删除所述定时器列表的数据;根据所述定时器列表的数据生成通航航空器综合航迹信息,并在监视界面显示所述通航航空器综合航迹信息。
24.进一步地,在所述判断在定时器列表中是否存在与所述通航地面服务器接收的监视数据相同的数据的步骤之后还包括:用于当不存在与所述监视数据具有相同航空器识别码的数据时,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器。
25.本发明通航低空监视系统及方法,综合地面系统ads
‑
b接收机、北斗指挥机、移动通信网(4g/5g)地面设备的三条信号接收链路,针对通航活动密集的空域,可以通过ads
‑
b多站点融合组网的技术,增加地面ads
‑
b接收机站点架设,实现对低空空域ads
‑
b监视信号覆盖范围的扩容或多重信号覆盖,依托ads
‑
b监视数据高更新率的优势,提高通航低空监视效果。
附图说明
26.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
27.图1为根据本发明示例性第一实施例的通航低空监视系统的结构示意图;图2为根据本发明示例性第二实施例的通航低空监视系统的结构示意图;图3为根据本发明示例性第三实施例的通航低空监视方法的流程图;图4为根据本发明示例性第四实施例的通航低空监视方法的流程图。
28.具体实施方式
29.下面结合附图对本发明实施例进行详细描述。
30.需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合;并且,基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
31.需要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
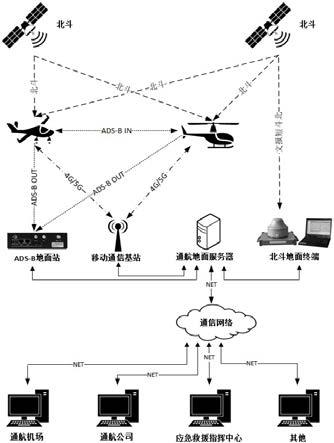
32.图1为根据本发明示例性第一实施例的通航低空监视系统的结构示意图,如图1所示,该通航低空监视系统,包括:用于通航航空器机载端的多模式通航cns(communication navigation & surveillance,即通信导航 & 监控)设备(图中未示出)、地面端的通航地面监视系统以及通航地面服务器。所述多模式通航cns设备,用于获取通用航空器的位置信息以及气压高度信息,并根据所述通用航空器的位置信息以及气压高度信息分别生成卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息。所述通航地面监视系统包括:卫星导航地面终端、ads
‑
b地面站以及移动通信基站;所述卫星导航地面终端用于接收、解析并转发所述卫星导航监视信号,所述ads
‑
b地面站用于接收、解析并转发ads
‑
b监视信号,所述移动通信基站用于接收、解析并转发移动通信监视信息。所述通航地面服务器用于接收并根据所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息,生成通航航空器综合航迹信息。
33.具体地,多模式通航cns设备,采用北斗定位(也支持gps等其他卫星导航系统信号)获取通用航空器位置信息(包含位置、速度、地理高度等),气压传感器获取通用航空器的气压高度信息,并通过北斗短报文、ads
‑
b、移动通信(4g/5g)多模式链路向地面发送航空器监视信息,以实现各类通航飞行活动全空域监视覆盖。多模式通航cns设备还提供基于ads
‑
b in的空空监视功能,可为通航机组提供空中交通态势感知与安全预警,进一步提高
通航自主飞行安全。
34.通航地面监视系统包含北斗地面指挥系统、ads
‑
b地面站(可支持组网)、移动通信网地面设备。北斗地面指挥系统可实现多模式通航cns设备的北斗短报文(rdss)链路的信号接收与发送,ads
‑
b地面站(可支持组网)实现多模式通航cns设备的ads
‑
b监视信号的接收,移动通信网地面设备实现多模式通航cns设备的移动通信链路(4g/5g)信号的接收与发送。北斗短报文/ads
‑
b/移动通信链路分别对应地面不同的信号收发设备,地面三链路设备再将各个信号链路获得的航空器监视信息送至通航地面服务器,地面监视服务器(或者通航地面监视数据中心)实现三链路信号的实时融合处理,进而获得三链路融和效果的通航飞机监视信息,借助三链路各自的优势,从而实现全空域通航飞机的有效地空监视。通航地面服务器将融合后的通航飞机综合航迹再按需传输给各类用户,如通航机场、通航公司、应急救援指挥中心、军方或政府管理部门等。
35.通航地面服务器形成的通航飞机综合航迹信息,包括航空器高精度定位信息(如经纬度、高度)、高度信息(气压高度、地理高度)、标识信息(如航空器识别码)、状态信息(速度、航向、升降)等,并可提供历史飞行轨迹查询功能。
36.图2为根据本发明示例性第二实施例的通航低空监视系统的结构示意图;其为图1所示实施例的优选实施方式,所述通航地面监视系统包括地面中心站以及多个ads
‑
b地面站,所述地面中心站包括所述卫星导航地面终端、ads
‑
b地面站以及移动通信基站;所述多个ads
‑
b地面站用于将多路ads
‑
b监视信号发送至所述通航地面服务器;所述地面中心站用于将所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息发送至所述通航地面服务器。
37.也就是说,中心地面站负责接收ads
‑
b、北斗、4g三个链路数据,其他地面站只负责接收ads
‑
b数据。数据由地面站解析后全部转发到服务器上,服务器进行多站点和多链路融合,最终推送到终端作显示。
38.对于所述通航地面服务器实现多站点融合要考虑过滤掉经纬度相同的点,多重覆盖的航空器会由多个地面站同时接收到机载报文并上送到服务器,服务器必然存在大量重复的点,不过滤的话会存在两个问题:1. 数据库存储大量重复点,要求数据库容量要大,必然导致昂贵的扩容费用;2. 界面显示时要渲染大量重复点,带来渲染效率的下降,必然影响视觉效果,如果通过升级硬件来解决这个问题的话也会带来相应的费用花销;多链路融合要考虑比较报文内部toa时间,北斗收发频次为1分钟/次,即当前发送北斗报文要1分钟后才能收到,不考虑时间戳的话,收到即显示会出现航空器跳回到1分钟之前位置的现象,这种严重的跳点问题是不能接受的。
39.具体而言,所述通航地面服务器实现多站点融合的具体流程可以参见图4,对应该流程,通航地面服务器包括多个功能模块,具体为:第一判断模块,用于判断在定时器列表中是否存在与所述通航地面服务器接收的监视数据中航空器识别码相同的数据,所述监视数据包括:所述多个ads
‑
b地面站发送的多路ads
‑
b监视信号、所述地面中心站发送的所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;
第二判断模块,与所述第一判断模块连接,所述第二判断模块用于若存在与所述监视数据中航空器识别码相同的数据,则判断所述监视数据与具有相同航空器识别码的数据的经度以及维度是否相同;第一处理模块,与所述第二判断模块连接,所述第一处理模块用于在所述监视数据与具有相同航空器识别码的数据的经度以及维度相同时,则丢弃所述监视数据;第三判断模块,与所述第一处理模块连接,所述第三判断模块用于在所述监视数据与具有相同航空器识别码的数据的经度以及维度不同时,判断所述监视数据的toa时间是否小于所述具有相同航空器识别码的数据的toa时间;第二处理模块,与所述第三判断模块连接,所述第二处理模块用于若所述监视数据的toa时间小于所述具有相同航空器识别码的数据的toa时间,则丢弃所述监视数据;第三处理模块,与所述第二处理模块连接,所述第三处理模块用于若所述监视数据的toa时间不小于所述具有相同航空器识别码的数据的toa时间,则删除所述具有相同航空器识别码的数据,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器,所述定时器用于在达到预定的时长时自动删除所述定时器列表的数据,如列表中数据启动2秒定时器,定时时间到自动删除;航迹生成及显示模块,与所述第三处理模块连接,所述航迹生成及显示模块用于根据所述定时器列表的数据生成通航航空器综合航迹信息,并在监视界面显示所述通航航空器综合航迹信息;第四处理模块,与所述第三处理模块连接,所述第四处理模块用于当不存在与所述监视数据具有相同航空器识别码的数据时,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器。
40.本实施例相对于现有技术通过链路切换,每个时刻只有一条链路数据输出,比如ads
‑
b信号良好时,北斗和4g数据就不用发送而言,三条链路数据同时发送,不存在链路切换,三条链路数据优先级相同。这样带来的好处一是节省链路切换的时间,二是数据一起发送可以降低数据传输丢包的影响。数据传输丢包影响还是挺大的,以北斗报文为例,北斗频次1分钟/次,即理论上1分钟收到1个报文,实际传输过程中丢包是不可避免的,丢1个包的话就相当于2分钟才收到一个点,丢2个包的话就相当于3分钟才收到一个点,依次类推... 这种场景下尽管4g信号不好,如果能收到哪怕是一个点,都是对监视效果的极大补充。老的架构下北斗链路工作时不会发送4g数据,丢包严重时监视效果就会大打折扣。新的架构三个链路点同时存在、互为补充,监视效果会更加流畅。更好的监视效果和4g费用相比,4g费用就可以忽略不计了。
41.此外,现有技术任何时刻都只有一条链路工作,所以数据融合的时候不需要考虑报文内部的toa时间,以到达服务器时间为基准依次显示。但是这种算法仅局限于单站点覆盖的场景,多站点覆盖的场景下存在缺陷。多重覆盖的航空器会由多个地面站同时接收到报文并上送到服务器,多个地面站网络延时是一个不可控的事情,极端场景下如果某个站点网络延时非常大,这样一来本该到达的点很晚才到达服务器,老的架构下就会出现位置回跳的现象,新的架构下通过比较报文内部的toa时间,会丢弃掉toa时戳更早的点,从而解决这个问题。
42.本发明各实施例利用ads
‑
b、北斗短报文、移动通信(4g/5g)三种数据链路,建立了
机载端多模式监视数据同时发送,地面系统多模式链路融合处理,通过地面ads
‑
b多站点融合组网技术、三链路数据融合技术,实现通用航空低空飞行时,能够满足各种空域环境、地域条件、地面设施情况的具有较好适应性和监视效果的系统级技术方案。
43.依托地面系统ads
‑
b接收机、北斗指挥机、移动通信网(4g/5g)地面设备的三条信号接收链路的系统技术方案,针对通航活动密集的空域,本发明各实施例可以通过ads
‑
b多站点融合组网的技术,增加地面ads
‑
b接收机站点架设,实现对低空空域ads
‑
b监视信号覆盖范围的扩容或多重信号覆盖,依托ads
‑
b监视数据高更新率的优势,提高系统监视效果。
44.本发明各实施例中的北斗短报文、移动通信(4g/5g)链路可具备地空双向通信功能,借助本发明各实施例,可以搭建适用于通航的地空通信数据链(北斗短报文+4g/5g),用于地面向空中传输数据信息,比如管控指令、飞行服务信息(气象数据、飞行计划信息等),也可以用于空中向地面发送信息,比如救援信息。或在此地空通信数据链技术方案基础上,根据通航飞行任务或飞行服务需求,进行其他的相关信息传输。
45.本发明各实施例机载端的多模式通航cns设备,不仅仅适用于本发明各实施例的地面监视系统,其ads
‑
b链路功能,与民航运输航空ads
‑
b监视技术保持统一的技术标准,使得采用本发明各实施例的通航飞机,其监视信息也能够被现有的运输航空ads
‑
b监视网络探测。
46.本发明各实施例机载端的多模式通航cns设备,同时以三个链路(ads
‑
b、北斗短报文、4g/5g)往外发送本机的监视信息,有两点优势:第一, 当本机机载端某个链路故障/失效时,导致该链路的飞机监视信息丢失时,机载端其他链路的监视信息依然可以确保地面对飞机的有效监控。
47.第二, 本机机载端同时发送多个链路的监视数据,当多链路同时生效时,也即是同一架飞机有多个链路的飞行轨迹,地面系统获得的是多个链路监视数据的融合结果,当某单个链路轨迹异常时,对融合后整体综合航迹与实际飞行轨迹的一致性影响不大,提高了监视可靠性。
48.本发明各实施例机载端的多模式通航cns设备,还提供了基于ads
‑
b in的空空监视功能,借助机载端屏显设备,飞行员可以实时掌握周边空域的交通情况,提高自主飞行安全。同时,地面系统也能监控低空空域通航飞机运行情况,设置危险间隔阈值,当地面系统监测到同一空域内存在航空器间隔超过安全间隔,或有类似趋势时,地面系统可产生告警信息,并通过北斗短报文+4g/5g的地空数据链将告警信息发送给飞行员,与机载端ads
‑
b in功能监测的自主告警功能,实现冗余备份、双重监测,进一步提高飞行安全裕度。
49.本发明各实施例主要考虑通航飞机的低空监视,主要是有人机。对于低空运行的无人机,可以考虑将本方案的机载端的多模式通航cns设备加装至无人机上,获取同等监视效果。
50.地面系统还可接入空域其他目标的监视信息(来自空管系统监视的运输飞机、无人机监控/管控系统的无人机监视信息),可将空域中无人机、通航飞机、运输飞机进行统一监控,将可能的告警信息发送给采用本发明的多模式通航cns设备,确保空中飞行安全。
51.在本发明各实施例基础上,将北斗短报文监视链路,改变为其他卫星数据链,比如海事卫星、铱星等星基数据链,发送飞机的监视信息,并在地面系统建立此星基数据链的飞机航迹,与ads
‑
b、移动通信数据链监视信息进行比对、融合,应当视作相同的卫星数据链技
术方案,在本发明保护范围内。
52.本发明各实施例提出的多模式通航cns设备,指的是通航飞机机载端设备,提供采用多模式卫星导航系统(北斗、gps等)实现航空器高精度定位(位置、速度、地理高度等信息)、采集气压高度信息,航空器识别信息,等监视数据进行编码,通过ads
‑
b、北斗短报文(卫星通信链路)、移动通信(4g/5g)向外发送。多模式通航cns设备在具体实施方式上,可以从飞机端获取电源,从机载数据总线读取航空器定位信息、高度信息、航空器识别信息等监视数据;也可以自带电池供电,自带卫星导航系统定位模块、气压高度采集模块,这些功能模块的组成方式,并不超出本发明技术方案的实质保护范围。
53.图3为根据本发明示例性第三实施例的通航低空监视方法的流程图,如图3所示,所述通航低空监视方法包括:步骤301:获取通用航空器的位置信息以及气压高度信息,并根据所述通用航空器的位置信息以及气压高度信息分别生成卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;步骤302:同时发送所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;步骤303:接收并根据所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息,生成通航航空器综合航迹信息。
54.优选地,步骤302包括:多个ads
‑
b地面站同时将多路ads
‑
b监视信号发送至通航地面服务器;地面中心站同时将所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息发送至所述通航地面服务器。
55.本实施例综合地面系统ads
‑
b接收机、北斗指挥机、移动通信网(4g/5g)地面设备的三条信号接收链路,针对通航活动密集的空域,可以通过ads
‑
b多站点融合组网的技术,增加地面ads
‑
b接收机站点架设,实现对低空空域ads
‑
b监视信号覆盖范围的扩容或多重信号覆盖,依托ads
‑
b监视数据高更新率的优势,提高通航低空监视效果。
56.图4为根据本发明示例性第四实施例的通航低空监视方法的流程图。图4主要解释了通航地面服务器实现多站点融合的具体流程,包括:步骤401:接收数据,具体包括:所述多个ads
‑
b地面站发送的多路ads
‑
b监视信号、所述地面中心站发送的所述卫星导航监视信号、ads
‑
b监视信号以及移动通信监视信息;步骤402:将接收的数据与定时器列表数据进行比较;步骤403:判断在定时器列表中是否存在与所述通航地面服务器接收的监视数据中航空器识别码相同的数据;步骤404:若存在与所述监视数据中航空器识别码相同的数据,则判断所述监视数据与具有相同航空器识别码的数据的经度以及维度是否相同;步骤405:在所述监视数据与具有相同航空器识别码的数据的经度以及维度相同时,则丢弃所述监视数据;步骤406:在所述监视数据与具有相同航空器识别码的数据的经度以及维度不同时,判断所述监视数据的toa时间是否小于所述相同的数据的toa时间;
步骤407:若所述监视数据的toa时间小于所述具有相同航空器识别码的数据的toa时间,则丢弃所述监视数据;步骤408:若所述监视数据的toa时间不小于所述具有相同航空器识别码的数据的toa时间,则删除所述相同的数据,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器,所述定时器用于在达到预定的时长时自动删除所述定时器列表的数据;步骤409:用于当不存在与所述监视数据具有相同航空器识别码的数据时,并将所述监视数据插入所述定时器列表,以及对所述定时器列表的数据启动一个新的定时器;步骤410:根据所述定时器列表的数据生成通航航空器综合航迹信息,并在监视界面显示所述通航航空器综合航迹信息。
57.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1