无人移动体返航辅助系统的制作方法
本发明是有关于一种无人移动体返航辅助系统。
背景技术:
1、在现有技术中,无人移动体,例如无人飞行器(unmanned aerial vehicle,uav),已广泛地应用在商业、军事、或个人娱乐等领域。举例来说,作为车辆中的娱乐设施,已存在利用搭载在车辆内的车辆用投影系统(例如,平视显示器(head up display,hud)或者内建在操作区域的触控显示屏幕等对无人移动体进行操作的系统。通常,经由本车辆与无人移动体之间的无线通信,本车辆上的操作者(例如乘客)可对无人移动体进行控制,例如控制无人移动体往所推测的移动位置进行移动(例如,飞行)。
2、用于推测移动位置的信息通常包括由卫星导航系统(global navigationsatellite system,gnss)等所取得的无人移动体的位置信息、或者由无人移动体所搭载的周边检测模组(如摄像机或雷达等传感器)所取得的周边信息(如障碍物的型态、高度、相对位置或距离等)。由此,当发生无法取得无人移动体的位置信息、或者无法取得周边信息的状况时,无人移动体可能难以返航,或者在返航过程中可能与周边的障碍物产生碰撞。由此,如何在无法取得无人移动体的位置信息或周边信息的情况下协助无人移动体返航,是目前急欲解决的课题之一。
3、[现有技术文献]
4、[专利文献]
5、[专利文献1]日本专利公开第2017-21755号
技术实现思路
1、本发明提供一种无人移动体返航辅助系统,在无法取得无人移动体的位置信息或周边信息的情况下,能够有效地协助无人移动体往返航位置返航。
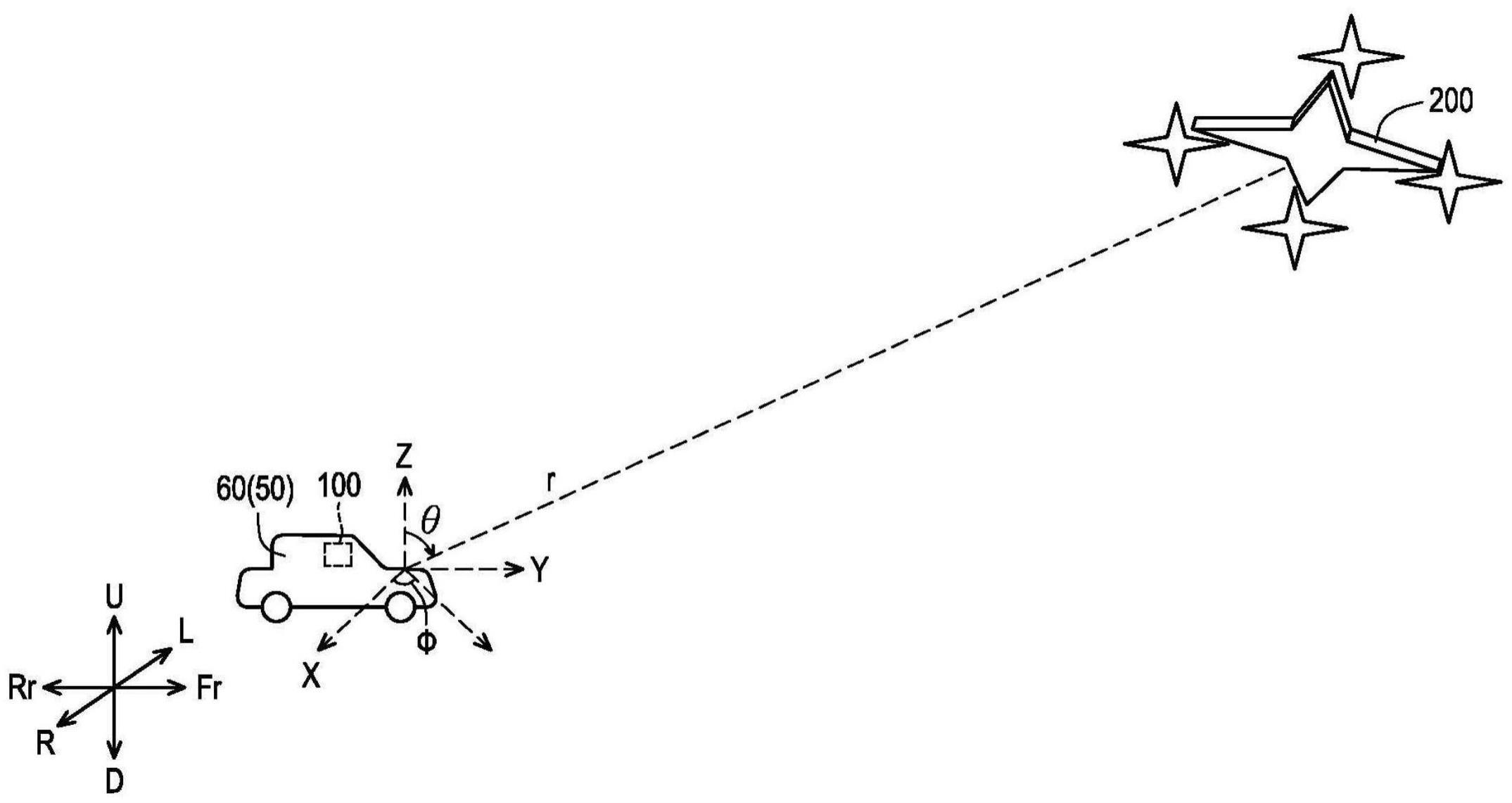
2、本发明提供一种无人移动体返航辅助系统,适用于辅助正进行远程操控的无人移动体往返航位置返航,所述无人移动体返航辅助系统包括:移动方向算出部,用以算出所述无人移动体的移动方向;信息取得部,用以取得所述无人移动体的位置信息以及所述无人移动体上所搭载的传感器所得到的传感器信息的至少其中一者;终端位置检测部,用以检测终端的终端位置;以及无人移动体检测部,用以依据所述终端所搭载的摄像装置所取得的图像来检测所述无人移动体,其中,在所述信息取得部无法取得所述无人移动体的所述位置信息以及所述传感器信息中应取得的至少其中一者的情况下,所述移动方向算出部基于所述无人移动体检测部的检测结果以及所述终端位置检测部所检测到的所述终端位置,算出所述无人移动体往所述返航位置移动的返航方向,所述无人移动体基于所述移动方向算出部所算出的所述返航方向往所述返航位置返航。
3、在本发明的一实施例中,所述信息取得部包括无人移动体信息取得部以及传感器信息取得部的至少其中一者,所述无人移动体信息取得部用以取得所述无人移动体的所述位置信息,且所述传感器信息取得部用以取得所述无人移动体的所述传感器信息。
4、在本发明的一实施例中,所述无人移动体返航辅助系统还包括行进方向推定部,其中,所述信息取得部包括用以取得所述无人移动体的所述位置信息的无人移动体信息取得部,在所述信息取得部无法取得所述无人移动体的所述位置信息的情况下,所述行进方向推定部基于所述无人移动体检测部所检测的所述无人移动体的移动时的图像分析,推定所述无人移动体的行进方向,并且所述移动方向算出部基于所述行进方向推定部的推定结果,进行所述无人移动体的所述返航方向的算出。
5、在本发明的一实施例中,所述信息取得部包括用以取得所述无人移动体的所述位置信息的无人移动体信息取得部,在所述信息取得部无法取得所述无人移动体的所述位置信息的情况下,基于无法取得所述位置信息之前已取得的位置信息,假定所述无人移动体的存在而推定所述无人移动体的位置,在基于已取得的所述位置信息而推定所述无人移动体存在于与所述摄像装置的方向不同的方向上的情况下,以变更所述终端的朝向或位置的方式对所述终端的操作者进行指示。
6、在本发明的一实施例中,所述无人移动体返航辅助系统还包括返航路线策划部,其中,所述返航路线策划部基于所述摄像装置的信息策划所述无人移动体避开障碍物的返航路线。
7、在本发明的一实施例中,所述无人移动体返航辅助系统还包括方向变更部,其中,所述方向变更部基于所述无人移动体检测部的所述检测结果,将位在所述终端的前方的所述无人移动体变更方向成为所述无人移动体的背面朝向所述终端。
8、在本发明的一实施例中,所述无人移动体检测部依据所述无人移动体的背面所设的指示灯或由图像辨识所得的机体图像,来确认所述无人移动体的背面。
9、在本发明的一实施例中,所述无人移动体基于所述返航方向以所述无人移动体与所述终端之间的距离逐渐变短的方式往所述返航位置直线返航。
10、在本发明的一实施例中,在所述无人移动体的背面未朝向所述终端,而对所述无人移动体进行方向变更的情况下,使所述无人移动体一边往下方移动一边往所述无人移动体的后方移动,并且,在所述直线返航的过程中,所述无人移动体更依据周围的阻抗来补正横向或旋转方向的移动量。
11、在本发明的一实施例中,所述返航位置包括所述终端的周边位置。
12、基于上述,在本发明的无人移动体返航辅助系统中,在信息取得部无法取得无人移动体的位置信息以及无人移动体上所搭载的传感器所得到的传感器信息中应取得的至少其中一者的情况下,移动方向算出部基于无人移动体检测部的检测结果(即依据终端所搭载的摄像装置所取得的图像进行检测的结果)以及终端位置检测部所检测到的终端位置,算出无人移动体往返航位置移动的返航方向,无人移动体基于所述返航方向往返航位置返航。如此,即使无法取得无人移动体本身应取得的信息(无人移动体的位置信息或传感器信息等),无人移动体返航辅助系统也能够通过终端所提供的信息(对无人移动体的图像检测、终端位置)来辅助无人移动体找到返航方向和/或避开周围障碍物而顺利返航。据此,本发明的无人移动体返航辅助系统在无法取得无人移动体的位置信息或周边信息的情况下,能够有效地协助无人移动体往返航位置返航。
13、为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
技术特征:
1.一种无人移动体返航辅助系统,适用于辅助正进行远程操控的无人移动体往返航位置返航,所述无人移动体返航辅助系统的特征在于,包括:
2.根据权利要求1所述的无人移动体返航辅助系统,其特征在于,
3.根据权利要求1所述的无人移动体返航辅助系统,其特征在于,还包括行进方向推定部,其中,
4.根据权利要求1所述的无人移动体返航辅助系统,其特征在于,
5.根据权利要求1至4中任一项所述的无人移动体返航辅助系统,其特征在于,还包括返航路线策划部,其中,
6.根据权利要求1至4中任一项所述的无人移动体返航辅助系统,其特征在于,还包括方向变更部,其中,
7.根据权利要求6所述的无人移动体返航辅助系统,其特征在于,
8.根据权利要求1至4中任一项所述的无人移动体返航辅助系统,其特征在于,
9.根据权利要求8所述的无人移动体返航辅助系统,其特征在于,
10.根据权利要求1至4中任一项所述的无人移动体返航辅助系统,其特征在于,
技术总结
本发明提供一种无人移动体返航辅助系统,在无法取得无人移动体的位置信息或周边信息的情况下,能够有效地协助无人移动体往返航位置返航。无人移动体返航辅助系统包括移动方向算出部、信息取得部、终端位置检测部、以及无人移动体检测部,其中,在所述信息取得部无法取得所述无人移动体的位置信息以及所述无人移动体上所搭载的传感器所得到的传感器信息中应取得的至少其中一者的情况下,所述移动方向算出部基于所述无人移动体检测部的检测结果以及所述终端位置检测部所检测到的终端位置,算出所述无人移动体往返航位置移动的返航方向,所述无人移动体基于所述移动方向算出部所算出的所述返航方向往所述返航位置返航。
技术研发人员:新谷秀和
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!