一种道路风险预估分析方法及防撞告警装置与流程
1.本发明属于道路施工安全防护技术,尤其涉及一种道路风险预估分析方法及防撞告警装置。
背景技术:
2.在公路上进行养护作业时,道路养护人员不得不面对飞速的车流,在其专注作业时往往难以顾及周围环境,一旦驾驶者分神或操作不当就容易酿成事故,存在较大的安全隐患。为保障道路养护人员的生命安全,较为有较的做法是设置能够感知来车的预警装置,在车辆靠近或行驶异常时及时向养护人员发出告警,赢取避险时间。
技术实现要素:
3.基于背景技术中所提及的问题,本发明提出一种道路风险预估分析方法及防撞告警装置,其具体通过以下技术手段实现:
4.本发明的道路风险预估分析方法包含以下步骤:
5.s1,按需选定作业车道,并设定防撞告警区域的范围和告警速度阀值;
6.s2,设定与作业车道相邻的车道为超速检测警区域,并设定限速阈值;
7.s3,将车道宽度方向作为雷达扫描面的x向坐标,将防撞告警区域沿车道方向的预警距离作为雷达扫描面的y向坐标;
8.s3,开启雷达扫描并分析扫描数据,其中有以下判断条件:
9.条件一,当目标车辆位于当前作业车道或相邻车道时,且目标车辆的速度超过所述限速阈值,则将目标车辆列为预警目标;
10.条件二,当目标车辆位于当前作业车道内的防撞告警区域,且目标车辆速度超过所述告警速度阈值时,则将目标车辆列为告警目标;
11.条件三,若目标车辆位于当前作业车道内的防撞告警区域内,且根据目标车辆的速度和防撞告警区域的y向长度计算碰撞时间t1,将目标车辆的车速计算其安全反应及制动时间t2作比较,若t2大于t1,则将目标车辆列为危险目标;
12.s4,满足步骤s3中的任意一个条件则进行告警,告警方式包括但不限于通过预警机自带的声/光告警装置,或/和通过与预警机通信并佩戴于作业人员身上的便携告警装置。
13.本发明的防撞告警装置包括预警机和与预警机通信的便携告警装置,所述预警机和便携告警装置用于执行上述的道路风险预估分析方法,所述预警机包括机身、位于机身内的控制主板、通信装置、蓄能电池、以及至少一个扫描雷达。
14.本发明的有益效果是:根据不同的路况(高速公路、市政公路等)设定相应的防撞告警区域的范围、告警速度阀值、超速检测警区域和限速阈值,通过数据计算获得来车的相应告警等级(无需告警、预警目标、告警目标、危险目标),在车辆靠近或行驶异常时及时向养护人员发出告警,赢取避险时间,保障道路养护人员的生命安全。
附图说明
15.图1为本发明的车道及防撞告警区域划分示意图。
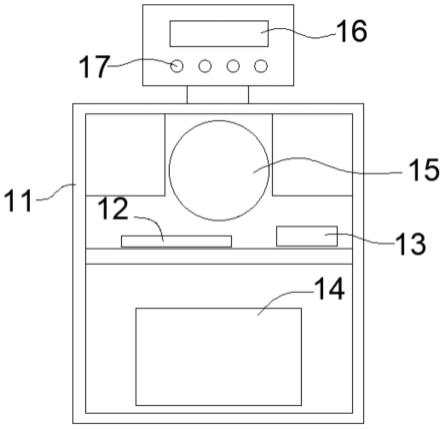
16.图2为本发明的防撞告警装置的内部结构示意图。
具体实施方式
17.如下结合附图对本申请方案作进一步描述:
18.参见附图1,道路风险预估分析方法包含以下步骤:
19.s1,按需选定作业车道l1,并设定防撞告警区域d1的范围和告警速度阀值;在本实施例中,所述防撞告警区域d1优选为位于预警机1前方的、x向最大距离和y向最大距离围成的矩形区域;
20.s2,设定与作业车道l1相邻的车道l2为超速检测警区域d2,并设定限速阈值;
21.s3,将车道宽度方向作为雷达扫描面的x向坐标,将防撞告警区域d1沿车道方向的预警距离作为雷达扫描面的y向坐标;
22.s3,开启雷达扫描并分析扫描数据,其中有以下判断条件:
23.条件一,当目标车辆位于当前作业车道l1或相邻车道l2时,且目标车辆的速度超过所述限速阈值,则将目标车辆列为预警目标;
24.条件二,当目标车辆位于当前作业车道l1内的防撞告警区域d1,且目标车辆速度超过所述告警速度阈值时,则将目标车辆列为告警目标;
25.条件三,若目标车辆位于当前作业车道l1内的防撞告警区域d1内,且根据目标车辆的速度和防撞告警区域的y向长度计算碰撞时间t1,将目标车辆的车速计算其安全反应及制动时间t2作比较,若t2大于t1,则将目标车辆列为危险目标;
26.s4,满足步骤s3中的任意一个条件则进行告警,告警方式包括但不限于通过预警机1自带的声/光告警装置,或/和通过与预警机1通信并佩戴于作业人员身上的便携告警装置2,所述便携告警装置2发出声波或/和震动告警。本实施例中,所述便携告警装置2优选为与预警机1通信的电子手环,由预警机1向电子手环发送指令使其产生声响或振动实现告警。
27.对所述预警目标、告警目标、危险目标的告警形式不同,方便养护人员凭感观进行快速识别,例如:以预警机1自带的声/光告警装置的不同声音或不同音量进行告警;或/和以便携告警装置2的不同声音或不同音量进行告警;对预警目标、告警目标、危险目标的声音频率或音量依次增大以引起养护人员的注意;又如,以便携告警装置2的不同频率的振动进行告警,由于是佩戴于养护人员身上,振动是十分有效的告警方式,同样对预警目标、告警目标、危险目标的振动频率依次增大,从而让养护人员根据振感下意识地作出反应。
28.防撞告警区域d1采用矩形区域边界,相较于扇形区域边界能够更为敏感地捕获对目标车辆跑偏、变道、压线等情形,提高判断的准确性。
29.参见附图2,防撞告警装置包括预警机1和与预警机1通信的便携告警装置2,所述预警机1和便携告警装置2用于执行上述的道路风险预估分析方法,所述预警机1包括机身11、位于机身11内的控制主板12、通信装置13、蓄能电池14、以及至少一个扫描雷达15,所述机身11上设有显示屏16和操作键17。养护人员通过显示屏16和操作键17能够方便地对作业车道l1、防撞告警区域d1的范围、告警速度阀值、超速检测警区域和限速阈值进行设定,从
而将预警机1设置为适合当前路况,同时为更好地适应户外作业,特意通过蓄能电池14进行供电,无需配设其它发电设备。所述通信装置13除可与便携告警装置2(电子手环)连接外,还可以是包含3g/4g模块,实现作业扫描数据上传操作。
30.上述优选实施方式应视为本申请方案实施方式的举例说明,凡与本申请方案雷同、近似或以此为基础作出的技术推演、替换、改进等,均应视为本专利的保护范围。
技术特征:
1.一种道路风险预估分析方法,其特征在于,包含以下步骤:s1,按需选定作业车道,并设定防撞告警区域的范围和告警速度阀值;s2,设定与作业车道相邻的车道为超速检测警区域,并设定限速阈值;s3,将车道宽度方向作为雷达扫描面的x向坐标,将防撞告警区域沿车道方向的预警距离作为雷达扫描面的y向坐标;s3,开启雷达扫描并分析扫描数据,其中有以下判断条件:条件一,当目标车辆位于当前作业车道或相邻车道时,且目标车辆的速度超过所述限速阈值,则将目标车辆列为预警目标;条件二,当目标车辆位于当前作业车道内的防撞告警区域,且目标车辆速度超过所述告警速度阈值时,则将目标车辆列为告警目标;条件三,若目标车辆位于当前作业车道内的防撞告警区域内,且根据目标车辆的速度和防撞告警区域的y向长度计算碰撞时间t1,将目标车辆的车速计算其安全反应及制动时间t2作比较,若t2大于t1,则将目标车辆列为危险目标;s4,满足步骤s3中的任意一个条件则进行告警,告警方式包括但不限于通过预警机自带的声/光告警装置,或/和通过与预警机通信并佩戴于作业人员身上的便携告警装置。2.根据权利要求1所述的道路风险预估分析方法,其特征在于,所述防撞告警区域为位于预警机前方的、x向最大距离和y向最大距离围成的矩形区域。3.根据权利要求1所述的道路风险预估分析方法,其特征在于,所述便携告警装置发出声波或/和震动告警。4.根据权利要求1所述的道路风险预估分析方法,其特征在于,所述便携告警装置为与预警机通信的电子手环。5.根据权利要求1所述的道路风险预估分析方法,其特征在于,对所述预警目标、告警目标、危险目标的告警形式不同,其中包括:以预警机自带的声/光告警装置的不同声音或不同音量进行告警;或/和以便携告警装置的不同声音或不同音量进行告警;或/和以便携告警装置的不同频率的振动进行告警。6.一种防撞告警装置,其特征在于,包括预警机和与预警机通信的便携告警装置,所述预警机和便携告警装置用于执行如权利要求1至5任一项所述的道路风险预估分析方法。7.根据权利要求6所述的防撞告警装置,其特征在于,所述预警机包括机身、位于机身内的控制主板、通信装置、蓄能电池、以及至少一个扫描雷达。8.根据权利要求7所述的防撞告警装置,其特征在于,所述机身上设有显示屏和操作键。
技术总结
本发明提出一种道路风险预估分析方法及防撞告警装置,该方法包含以下步骤:S1,按需选定作业车道,并设定防撞告警区域的范围和告警速度阀值;S2,设定与作业车道相邻的车道为超速检测警区域,并设定限速阈值;S3,将车道宽度方向作为雷达扫描面的X向坐标,将防撞告警区域沿车道方向的预警距离作为雷达扫描面的Y向坐标;S3,开启雷达扫描并分析扫描数据;S4,满足判断条件的数据则进行告警。该装置包括预警机和与预警机通信的便携告警装置。本发明根据不同的路况设定相应的判断条件,通过数据计算获得来车的相应告警等级,在车辆靠近或行驶异常时及时向养护人员发出告警,赢取避险时间,保障道路养护人员的生命安全。保障道路养护人员的生命安全。保障道路养护人员的生命安全。
技术研发人员:牛洪芝 梁栩棋 杜汝霞
受保护的技术使用者:中山市易路美道路养护科技有限公司
技术研发日:2022.04.21
技术公布日:2022/8/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1