AGV路口控制系统及控制方法与流程
本发明涉及agv小车防撞系统,具体涉及一种agv路口控制系统及控制方法。
背景技术:
1、agv无人搬运车是柔性生产线和立体库等现代化仓储体系的关键设备之一,具有自动化程度高、灵敏等特色,所以在汽车制造、家电、重工等自动化生产和仓储体系有广泛应用。在柔性生产线系统中的立体仓库单元,agv小车主要完成物料搬运输送工作即入库、出库等操作。目前厂区内的agv小车在交叉路口中很容易造成交通混乱甚至引发安全问题。
技术实现思路
1、本发明提供一种agv路口控制系统及控制方法,通过该系统及控制方法,使多个agv小车在自动行进过程中,在交汇区内有序的交替通行,避免同时经过交汇区而导致的碰撞问题。
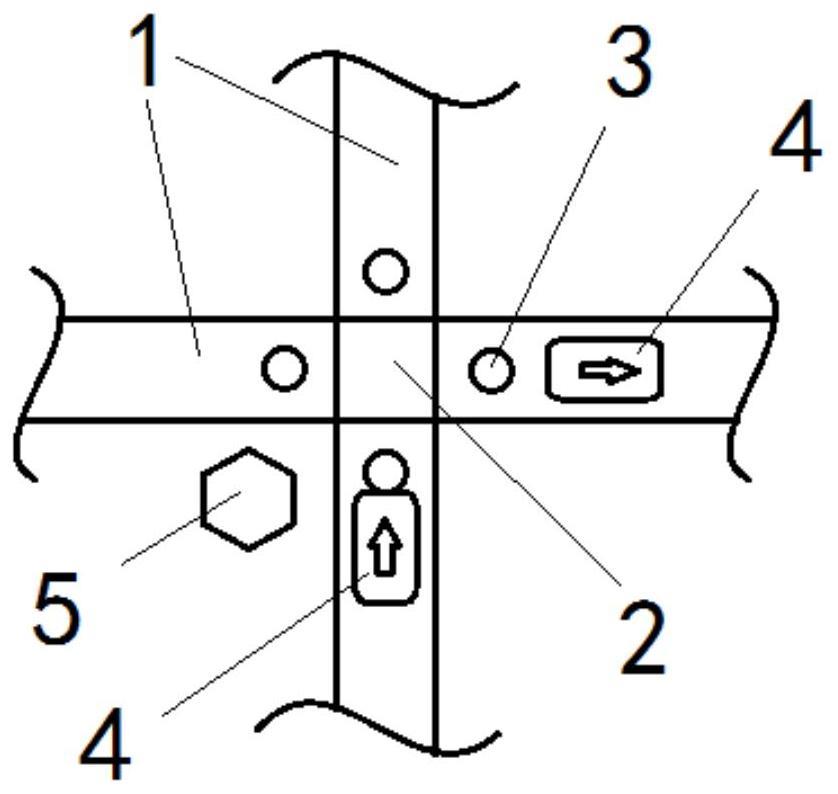
2、为了达到上述目的,本发明提供如下技术方案:一种agv路口控制系统及控制方法,其包括:标记单元,所述标记单元为多个设置,并分别固定设置在各个道路位于交汇区附近,各个所述标记单元分别设有唯一的就位标识;信号控制单元,所述信号控制单元设置在所述交汇区附近,用于对所述交汇区附近的道路循环广播对应各个所述标记单元的多组通行信号;车载单元,所述车载单元设置在agv小车内,并与所述agv小车的行走系统电性连接,所述车载单元内设有识别装置,与所述识别装置电性连接的记录装置,与所述记录装置电性连接的信号收发装置;
3、控制方法为:所述agv小车行驶过程中读取、记录所述车道内的就位标识数据,并且所述车载单元与所述行走系统通信,使所述agv小车停留在所述就位标识区域;所述agv小车通过所述信号收发装置接收所述通行信号,当所述通行信号与所述就位标识匹配时,所述车载单元与所述行走系统通信,使所述agv小车通过所述交汇区。
4、优选的,所述记录装置内设有定时模块,用于定时清除所述记录装置内的所述就位标识数据。
5、优选的,多组所述通行信号之间还包括延迟间隔信号,所述延迟间隔信号用于为各个所述agv小车提供通过所述交汇区的行走时间。
6、优选的,所述标记单元为嵌设在道路表面的rfid芯片,所述识别装置为固定设置在所述agv小车上的读写线圈。
7、优选的,所述信号控制单元包括多路计时器、编码器、载波调制器、发射器和天线;所述天线固定设置在所述交汇区附近。
8、优选的,各个所述标记单元分别设有唯一的前置标识,各个所述前置标识均间隔设置在所述就位标识远离所述交汇区的一端;所述通行信号覆盖各个所述前置标识区域。
9、优选的,所述车载单元还包括状态模块,所述状态模块与所述信号收发装置电性连接,用于采集所述agv小车的任务状态;所述信号控制单元包括接收器,所述接收器与所述多路计时器及所述载波调制器及所述天线电性连接。
10、本发明有益效果为:实现了agv小车工作过程中交叉行走的防撞功能,其中信号控制单元通过通行信号指派即将通过交汇区的agv小车的通过顺序,在指派过程的控制方法为:所述agv小车行驶过程中读取、记录所述车道内的就位标识数据,并且所述车载单元与所述行走系统通信,使所述agv小车停留在所述标记单元区域;所述agv小车通过所述信号收发装置接收所述通行信号,当所述通行信号与所述就位标识匹配时,所述车载单元与所述行走系统通信,使所述agv小车通过所述交汇区,因此通过该系统及控制方法,使多个agv小车在自动行进过程中,在交汇区内有序的交替通行,避免同时经过交汇区而导致的碰撞问题。其中,定时模块根据设定的时长来决定记录装置的记忆时长,确保小车通过交汇区后不在受新的通行信号所影响。信号控制单元每条道路行驶的agv小车提供一个交汇区域通过时间,从而避免因两条道路的通行间隔较近导致的碰撞问题。
技术特征:
1.一种agv路口控制系统及控制方法,其特征在于,包括:
2.根据权利要求1所述的agv路口控制系统及控制方法,其特征在于:所述记录装置内设有定时模块,用于定时清除所述记录装置内的所述就位标识数据。
3.根据权利要求1所述的agv路口控制系统及控制方法,其特征在于:多组所述通行信号之间还包括延迟间隔信号,所述延迟间隔信号用于为各个所述agv小车提供通过所述交汇区的行走时间。
4.根据权利要求1所述的agv路口控制系统及控制方法,其特征在于:所述标记单元为嵌设在道路表面的rfid芯片,所述识别装置为固定设置在所述agv小车上的读写线圈。
5.根据权利要求1所述的agv路口控制系统及控制方法,其特征在于:所述信号控制单元包括多路计时器、编码器、载波调制器、发射器和天线;所述天线固定设置在所述交汇区附近。
6.根据权利要求5所述的agv路口控制系统及控制方法,其特征在于:各个所述标记单元分别设有唯一的前置标识,各个所述前置标识均间隔设置在所述就位标识远离所述交汇区的一端;所述通行信号覆盖各个所述前置标识区域。
7.根据权利要求6所述的agv路口控制系统及控制方法,其特征在于:所述车载单元还包括状态模块,所述状态模块与所述信号收发装置电性连接,用于采集所述agv小车的任务状态;所述信号控制单元包括接收器,所述接收器与所述多路计时器及所述载波调制器及所述天线电性连接。
技术总结
本发明涉及AGV小车防撞系统技术领域,具体涉及一种AGV路口控制系统及控制方法,其包括:标记单元,所述标记单元为多个设置,并分别固定设置在各个道路位于交汇区附近,各个所述标记单元分别设有唯一的就位标识;信号控制单元,所述信号控制单元设置在所述交汇区附近,用于对所述交汇区附近的道路循环广播对应各个所述标记单元的多组通行信号;车载单元,所述车载单元设置在AGV小车内,并与所述AGV小车的行走系统电性连接,所述车载单元内设有识别装置,与所述识别装置电性连接的记录装置,与所述记录装置电性连接的信号收发装置;本发明协调多个AGV小车能自动有序的行走于交汇区中,避免因同时经过交汇区而导致的碰撞问题。
技术研发人员:杜峰斌,相秋红
受保护的技术使用者:西安铁蜗牛自动化设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!